(论文)[2022-SIGA-C] Marginal Multiple Importance Sampling
Marginal Multiple Importance Sampling
- 作者
- Rex West:The University of Tokyo Japan
- Iliyan Georgiev:Autodesk United Kingdom
- Toshiya Hachisuka:University of Waterloo Canada
- 使用 MIS 的时候,如果 pdf 无法单点计算【例如是其他 pdf
的积分】,如何处理?
- SMIS 只能处理一种采样方式【一个连续的 technique space \(\mathcal{T_1}\)】
- 我们提出 MMIS 能够结合多种采样方式【可以处理多个连续的 technique space】
- 另外给出了两个应用:path filtering、photon mapping
Introduction
- CMIS
可以结合无穷多种【不可数也行】采样方式,但是计算代价高;于是其使用 SMIS
近似
- SMIS 预先采样几种采样技术,然后只对这几种技术做 MIS
- SMIS is limited to combining samples drawn from techniques that are
defined (parameterized) in a single technique space.
- 他说 SMIS 只能从一个单一的参数化采样方法中采样,MMIS 能够结合多种技术
- 意思应该是 \(\mathcal{T}_1,\mathcal{T}_2\) 都是无穷的空间,SMIS 只能处理 \(\mathcal{T}_1\),但是 MMIS 能够结合 \(\mathcal{T}_1,\mathcal{T}_2\)
- 提出了 MMIS,然后以及几种应用
- marginal path sampling framework
- path-space filtering;CMIS
论文说可以将其构建成无偏采样形式
- 对比 path graph
- MMIS 和 SMIS 的区别
- SMIS 只考虑了 1 种采样空间;MMIS 可以和处理多种采样空间
- SMIS 脱胎于 CMIS,因此本文将 SMIS 的作用限制于只能采样一种采样方式【对应 CMIS 的那个连续空间】
- 说实话这个扩展也太直观了,以至于我都没理解他在做这个
- MMIS 的思路:把每一种边缘分布本身当作一种采样策略
- MMIS 混合的是 \(nT\) 种采样技术
- 看看副录中平衡启发式的表达形式你就懂了
- MMIS 混合的是 \(nT\) 种采样技术
MMIS
- 积分
\[ I=\int_{\mathcal{X}}f(x)\;\mathrm{d}x \]
- \(T\) 种采样技术 ,每种 \(n_i\) 个样本,每个样本采样概率 \(p_i\)
- 无偏估计如下
\[ \langle I \rangle_{\text{MIS}} = \sum_{i=1}^{T} \sum_{j=1}^{n_i} \frac{w_i(x_{i,j}) f(x_{i,j})}{n_i p_i(x_{i,j})} = \sum_{i=1}^{T} \sum_{j=1}^{n_i} \langle I \rangle_{\text{MIS}}^{i,j} \tag{1} \]
- \(p_i\) 可能没有闭式解,这样就无法无偏估计 \(I\)
\[ p_i(x) = \int_{\mathcal{T}_i} p_i(x, t) \,\mathrm{d}t = \int_{\mathcal{T}_i} p_i(x \vert t) p_i(t) \,\mathrm{d}t \tag{2} \]
Marginal MIS estimator
- balance heuristic
\[ w_i(x) = \frac{n_i p_i(x)}{\sum_{i'=1}^{T} n_{i'} p_{i'}(x)} = \frac{n_i p_i(x)}{\sum_{i'=1}^{T} n_{i'} \int_{\mathcal{T}_{i'}} p_{i'}(x \vert t) p_{i'}(t) \,\mathrm{d}t} \tag{3} \]
- 那么单样本的估计如下
\[ \langle I \rangle_{\text{MIS}}^{i,j} = \frac{f(x_{i,j})}{\sum_{i'=1}^{T} n_{i'} \int_{\mathcal{T}_{i'}} p_{i'}(x_{i,j} \vert t) p_{i'}(t) \,\mathrm{d}t} \tag{4} \]
- 和 CMIS 类似,分母构建估计
\[ \langle I \rangle_{\text{MIS}}^{i,j} \approx \frac{f(x_{i,j})}{\sum_{i'=1}^{T} \cancel{n_{i'}} \left[ \frac{1}{\cancel{n_{i'}}} \sum_{j'=1}^{n_{i'}} \frac{p_{i'}(x_{i,j} \mid t_{i',j'}) \cancel{p_{i'}(t_{i',j'})}}{\cancel{p_{i'}(t_{i',j'})}} \right]} \tag{5} \]
- 此时无偏估计如下
- 条件是采样到的技术需要包含整个定义域【和 SMIS 相同】
\[ \langle I \rangle_{\text{MMIS}} = \sum_{i=1}^{T} \sum_{j=1}^{n_i} \frac{f(x_{i,j})}{\sum_{i'=1}^{T} \sum_{j'=1}^{n_{i'}} p_{i'}(x_{i,j} \mid t_{i',j'})} \tag{6} \]
- SMIS 的形式如下
\[ \langle I\rangle_{\mathrm{SMIS}}=\sum_{i=1}^n\frac{\dot{w}(t_i,x_i)f(x_i)}{p(x_i|t_i)}=\sum_{i=1}^n\frac{f(x_i)}{\sum_{j=1}^np(x_i|t_j)} \]
\[ \dot{w}(t_{i},x)=\frac{p(x|t_{i})}{\sum_{j=1}^{n}p(x|t_{j})} \]
- 二者的区别
- 当 \(T=1\) 的时候,MMIS 退化为 SMIS【看下面实验计算 pdf 评估次数】
- 无偏条件都是:采样到的技术需要包含整个定义域
- classical 和 marginal 结合
- classical technique:扩展 \(p(x\mid t)=p(x)\)
- 或者将积分拆分为两个部分:classical + marginal
Canonical experiments
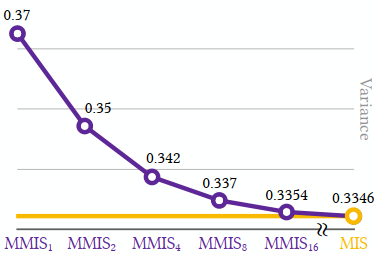
- 一些 2D 实验
- MMIS\(_n\) 表示每种策略使用 \(n\) 个样本(\(n_i=n\))
- 实验 1
- \(T=2\),MMIS\(_1\) 能够结合 classical 算法 和 SMIS\(_2\),然后实现更好的结果
- 实验 2:一共 \(N\) samples,\(N/(nT)\) 轮取平均
- MIS 表示式子 (1) 解析计算分母
- MMIS\(_n\) pdf 评估次数:\(nNT=nT\times nT\times N/(nT)\)
- 增大了计算开销
- SMIS\(_n\) pdf 评估次数:\(nN=n^2\times N/n\)
Path Sampling Using MMIS
MCPT
\[ I = \int_{\mathcal{P}} f(\mathbf{\bar{x}}) \,\mathrm{d}\mathbf{\bar{x}} \approx \frac{1}{n} \sum_{i=1}^{n} \frac{f(\mathbf{\bar{x}}_i)}{\rho(\mathbf{\bar{x}}_i)} \tag{7} \]
- UPT
\[ p(\mathbf{\bar{x}}) = p(x_1, \ldots, x_k) = p(x_1) p(x_2 \mid x_1) \prod_{i=3}^{k} p(x_i \mid x_{i-1}, x_{i-2}) \tag{8} \]

- 任意方式构建 \(\mathbf{x}\),只需要 pdf 能解析计算【readily computable】
- 如下方式:移除 \(\mathbf{x}_2\) 构建,此时 pdf 不好算
 \[
\begin{align}
p^*(\mathbf{\bar{x}}) &= p^*(\mathbf{x}_1, \mathbf{x}_3, \ldots,
\mathbf{x}_{k+1}) \tag{9} \\
&= p^*(\mathbf{x}_1) p^*(\mathbf{x}_3 \mid \mathbf{x}_1)
p^*(\mathbf{x}_4 \mid \mathbf{x}_3) \prod_{i=5}^{k+1} p^*(\mathbf{x}_i
\mid \mathbf{x}_{i-1}, \mathbf{x}_{i-2}) \tag{10} \\
\\
p^*(\mathbf{x}_3 \mid \mathbf{x}_1) &= \int_{\mathcal{M}}
p^*(\mathbf{x}_3 \mid \mathbf{x}_2, \mathbf{x}_1) p^*(\mathbf{x}_2 \mid
\mathbf{x}_1) \,\mathrm{d}\mathbf{x}_2 \tag{11} \\
p^*(\mathbf{x}_4 \mid \mathbf{x}_3) &= \int_{\mathcal{M}}
p^*(\mathbf{x}_4 \mid \mathbf{x}_3, \mathbf{x}_2) p^*(\mathbf{x}_2 \mid
\mathbf{x}_1) \,\mathrm{d}\mathbf{x}_2 \tag{12}
\end{align}
\]
\[
\begin{align}
p^*(\mathbf{\bar{x}}) &= p^*(\mathbf{x}_1, \mathbf{x}_3, \ldots,
\mathbf{x}_{k+1}) \tag{9} \\
&= p^*(\mathbf{x}_1) p^*(\mathbf{x}_3 \mid \mathbf{x}_1)
p^*(\mathbf{x}_4 \mid \mathbf{x}_3) \prod_{i=5}^{k+1} p^*(\mathbf{x}_i
\mid \mathbf{x}_{i-1}, \mathbf{x}_{i-2}) \tag{10} \\
\\
p^*(\mathbf{x}_3 \mid \mathbf{x}_1) &= \int_{\mathcal{M}}
p^*(\mathbf{x}_3 \mid \mathbf{x}_2, \mathbf{x}_1) p^*(\mathbf{x}_2 \mid
\mathbf{x}_1) \,\mathrm{d}\mathbf{x}_2 \tag{11} \\
p^*(\mathbf{x}_4 \mid \mathbf{x}_3) &= \int_{\mathcal{M}}
p^*(\mathbf{x}_4 \mid \mathbf{x}_3, \mathbf{x}_2) p^*(\mathbf{x}_2 \mid
\mathbf{x}_1) \,\mathrm{d}\mathbf{x}_2 \tag{12}
\end{align}
\]
- 不能直接 MC 估计 \(p^{\ast}\),结果有偏
- MMIS 能解决这个问题
marginal path sampling framework
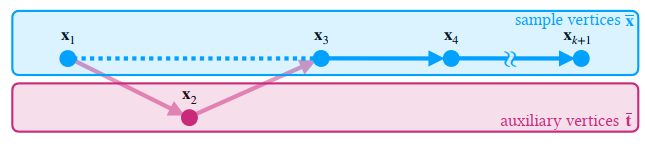
- 采样得到的路径 \(\mathbf{\bar{x}}\) 依赖于辅助节点 \(\mathbf{\bar{t}}\)
- 和式子 (6) 中的 MMIS 对应,(6) 中的 \(p_i(x_{i,j} \mid t_{i,j})\) 就是 \(p_i(\mathbf{\bar{x}}_{i,j} \mid
\mathbf{\bar{t}}_{i,j})\)
- classical 情况就是 \(\mathbf{\bar{t}}=\varnothing\)
- 对于 \(T\) 种采样技术 \(p_i\),分别采样 \(n_i\) 组 technique-sample 对 \((\mathbf{\bar{x}} \mid \mathbf{\bar{t}})\sim p_i(\mathbf{\bar{x}} \mid \mathbf{\bar{t}})\),其中 \(\mathbf{\bar{t}\in \mathcal{T}_i}\)
- marginal path sampling(MPS)estimator 如下
- 【这里考虑只会删除节点 \(\mathbf{x}_2\)】
\[ \langle I_k \rangle_{\text{MPS}} = \sum_{i=1}^{T} \sum_{j=1}^{n_i} \frac{f(\mathbf{\bar{x}}_{i,j})}{\sum_{i'=1}^{T} \sum_{j'=1}^{n_{i'}} p_{i'}(\mathbf{\bar{x}}_{i,j} \mid \mathbf{\bar{t}}_{i',j'})} \tag{13} \]
- 这假设 \(p(\mathbf{\bar{x}} \mid \mathbf{\bar{t}})\) 是能计算的,一般都是容易满足的
- 策略 \(\mathbf{\bar{t}}\) 不一定需要时节点,也可以是波长等
Multi-Vertex Path Filtering
- CMIS 给出了一种 path filtering 的无偏形式【前缀路径作为 technique,后缀路径作为 sample】

- MPS 可以处理这个
- 前缀作为 \(\mathbf{t}\),\(\mathcal{T}\) 就是所有满足 kernel \(\kappa\) 的前缀路径
- 当前前缀 + \(\mathbf{t}\) 对应的后缀作为样本 \(\mathbf{x}\)
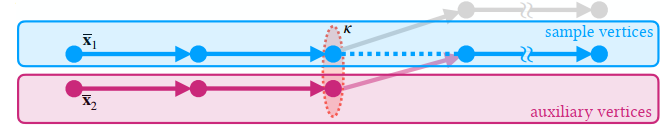
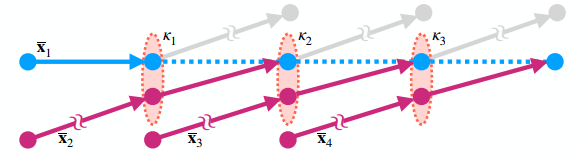
Extension to multi-vertex filtering
- 传统的只用一个节点,我们均摊开销,filtering 多个样本
- 例如下图,3 个节点依次进行采样【\(k=3\)】
- 看他这个图的意思应该是:根据当前点采样一个 path,再根据采样到的 path 的下一个节点采样
- 附录里的图就清晰多了
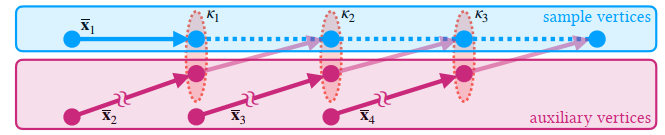
- 那么采样总数:\(T=\prod_{i=1}^{k}N(\mathbf{P},\kappa_i)\)
- \(N(\mathbf{P},\kappa_i)\) 表示满足 kernel 的前缀路径数量
- \(T\) 关于 \(k\) 指数
- 于是展开 MPS 的分母
- \(k'\) 表示路径的第 \(k'\) 个节点
\[ \sum_{i'=1}^{T} \sum_{j'=1}^{n_{i'}} p_{i'}(\mathbf{\bar{x}}_{i,j} \mid \bar{t}_{i',j'}) = \sum_{i'=1}^{T} \sum_{j'=1}^{n_{i'}} \underbrace{\prod_{k'=1}^{k} p_{i'}(\mathbf{x}_{i,j,k'} \mid \mathbf{\bar{y}}_{i',j',k'})}_{p_{i'}(\mathbf{\bar{x}}_{i,j} | \mathbf{\bar{t}}_{i',j'})} \tag{14} \]
- 式子展开之后,有很多公共项,复杂度从指数变为线性,副录有过程
Discussion
- MPS 无偏条件:对于 \(f(\mathbf{x})>0\) 的点,存在任意一个
\(p_i(\mathbf{x}\mid\mathbf{t})>0\)
- 选中的采样策略要覆盖定义域
- 可以通过【including the classical path tracing
techniques】实现,【query point 做 pt】
- 所有策略都无法覆盖定义域时,这样也能实现无偏
- 无偏实现很复杂,需要对每一个做可见性测试【ray casting】
- 有偏近似:认为 kernel 内部可见性相同
- 和 Path Graph 类似,依赖于高效 GPU 实现
- 和 Path Graph 的区别【还没看 Path Graph
呢】
- MMIS 在形式上提供了和 MC 的联系,不需要做 energy clamping
- MMIS 权重和为 1,可以保证无偏
- 聚类算法需要对每个查询点尽心最近邻查找,然后 pdf 评估,开销巨大;Path Graph 通过 k-means 均摊开销,但是 bias 不可控;我们可控【补充材料】
Result
- 离谱比赛又来了:CPU ray tracer + cuda GPU filtering
- 结果:我们用了 multi-vertex 效果好很多
- SMIS 的 single-vertex 开销大,效果不好
Multi-Vertex Photon Mapping
- 有些场景 PT 框架下就是效果差,需要 photon mapping【强方向光、焦散】
- PM 算法:收集周围的 emitter subpaths

- MPS 框架也适用,只是现在变成了收集 emitter subpath
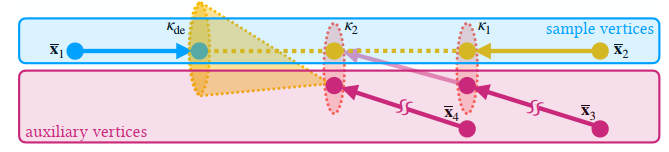
- 和之前的 PM 算法实现不兼容,因为他们不是基于 path sampling 的,没存 pdf
- 实现:作为 PM emitter pass 之后的一个后处理
- emitter pass -> path filtering(保持方向) -> standard photon-density estimation
Results
- rendering system 和前面一样
- 一个强焦散场景的结果:Path Graph < BDPT < PM < Photon Filtering
Conclusion
Limitations
有些方式 conditional pdf 也不能算:例如 MCMC
我们的方法引入了额外的内存开销
Future work
- Path and photon filtering 如何结合【类似于 UPS/VCM】
- 类似于 PM 缩半径,path filtering 能不能也在 kernel 内保持一致
- MMIS 引入了额外开销
- 多次复用,形成 Graph
Appedix
MMIS 无偏性证明
- 采样逻辑等价于:先采样 \(T\) 种技术,才然每种技术分配样本 \(n_i\)
- 保证了 MIS 和为 1,再加上全覆盖,就是无偏
\[ \begin{align} \mathbb{E}\big[\langle I \rangle_{\text{Mar}}\big] &= \mathbb{E}\big[\langle I \rangle_{\text{Mar}}\big]_{(t_{1,1}, x_{1,1}), \dots, (t_{T,n_T}, x_{T,n_T})} \tag{1a} \\ &= \mathbb{E}\Bigg[\mathbb{E}\big[\langle I \rangle_{\text{Mar}} \big| x_{1,1}, \dots, x_{T,n_T}\big]\Bigg]_{t_{1,1}, \dots, t_{T,n_T}} \tag{1b} \\ &= \mathbb{E}\Bigg[\mathbb{E}\bigg[\sum_{i=1}^T \sum_{j=1}^{n_i} \frac{f(x_{i,j})}{\sum_{i'=1}^T \sum_{j'=1}^{n_{i'}} p_{i'}(x_{i,j} | t_{i',j'})}\bigg]_{x_{1,1}, \dots, x_{T,n_T}}\Bigg]_{t_{1,1}, \dots, t_{T,n_T}} \tag{1c} \\ &= \mathbb{E}\Bigg[\sum_{i=1}^T \sum_{j=1}^{n_i} \int_{\mathcal{X}} \frac{f(x)}{\sum_{i'=1}^T \sum_{j'=1}^{n_{i'}} p_{i'}(x | t_{i',j'})} p_i(x | t_{i,j}) \, \mathrm{d}x\Bigg]_{t_{1,1}, \dots, t_{T,n_T}} \tag{1d} \\ &= \mathbb{E}\Bigg[\int_{\mathcal{X}} \underbrace{\sum_{i=1}^T \sum_{j=1}^{n_i} \frac{p_i(x | t_{i,j})}{\sum_{i'=1}^T \sum_{j'=1}^{n_{i'}} p_{i'}(x | t_{i',j'})}}_{=1} f(x) \, \mathrm{d}x\Bigg]_{t_{1,1}, \dots, t_{T,n_T}} \tag{1e}\\ &= \mathbb{E}\Bigg[\int_{\mathcal{X}} f(x) \, dx\Bigg]_{t_{1,1}, \dots, t_{T,n_T}} = I \tag{1f} \end{align} \]
- 不一定是从 balance heuristic 推导,只要满足和为 1 就行
\[ \langle I \rangle_{\text{Mar}}^* = \sum_{i=1}^T \sum_{j=1}^{n_i} w_i(t_{i,j}, x_{i,j}) \frac{f(x_{i,j})}{p_i(x_{i,j} | t_{i,j})} \]
- 使用如下平衡启发式,即得 MMIS estimator
\[ w_i(t, x) = \frac{p_i(x | t)}{\sum_{i'=1}^T \sum_{j'=1}^{n_{i'}} p_{i'}(x | t_{i',j'})} \]
MVPF 实现
- multi-vertex path filtering(MVPF)
- 上面的式子 (14)
\[ \sum_{i'=1}^{T} \sum_{j'=1}^{n_{i'}} p_{i'}(\mathbf{\bar{x}}_{i,j} \mid \bar{t}_{i',j'}) = \sum_{i'=1}^{T} \sum_{j'=1}^{n_{i'}} \underbrace{\prod_{k'=1}^{k} p_{i'}(\mathbf{x}_{i,j,k'} \mid \mathbf{\bar{y}}_{i',j',k'})}_{p_{i'}(\mathbf{\bar{x}}_{i,j} | \mathbf{\bar{t}}_{i',j'})} \tag{14} \]
- 变换形式:预计算好每一种策略的 pdf
- 复杂度从指数变成线性【指数是因为 \(N(\mathbf{P}, k')\) 这里对 \(k\) 累乘】
- 感觉思路就是预计算,然后开销分摊给其他的点
\[ \sum_{i'=1}^T \sum_{j'=1}^{n_{i'}} p_{i'}(\bar{x}_{i,j} | \bar{t}_{i',j'}) = \prod_{k'=1}^k \underbrace{\sum_{m=1}^{N(\mathbf{P}, k')} p_m(x_{i,j,k'} | \overline{y}_{m,k'})}_{\text{filter local MIS}} \]
Iterative MVPF 算法
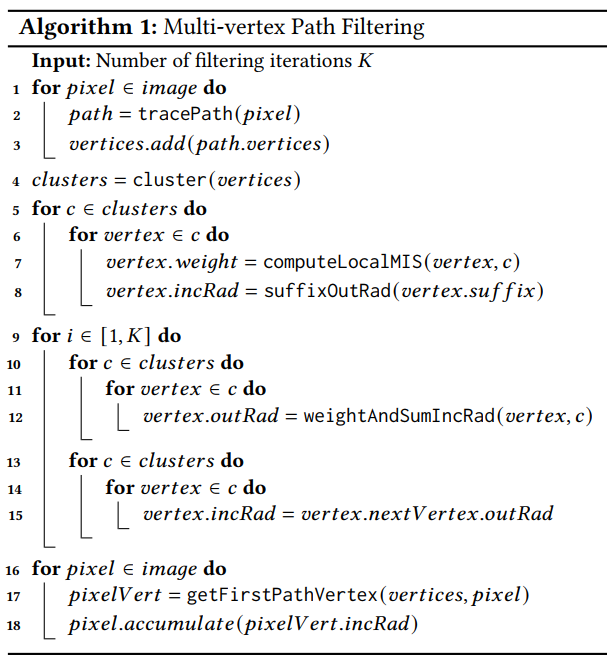
- 初始化:每一个节点的入射辐射度初始化为原始前缀对应的无偏估计
- 这在能量上比较稳定,允许任意次数 \(K\) 的迭代
- 迭代完之后,质量比较高
- 加入 NEE:相当于加入一种采样策略
- 每一个节点多加上 \(\mathbf{N}\) 种 Light Sampling 策略
- path sampling 的时候加上 NEE,cluster filtering 的时候,local MIS 分布修改为
\[ \sum_{m=1}^{N(\mathbf{P}, \kappa_{k'})} p_m(x_{k'} | \overline{y}_{m,k'}) {\color{red}+ N_L(\mathbf{P}, \kappa_{k'}) p_L(x_{k'})} \]
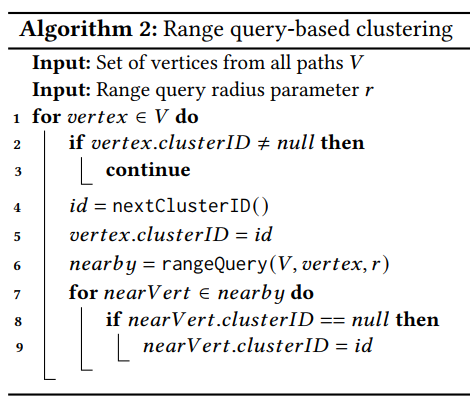
- Greedy range query clustering
- 逐个检查是否存在 id,如果没有 id,则执行给定半径的查询,将半径内无 id 的 vertex 和当前 vertex 都设置为新 id