(论文)[2025-EG] Neural Two-Level Monte Carlo Real-Time Rendering
Neural Two-Level Monte Carlo Real-Time Rendering
- 主页
- FLIP / MRSE

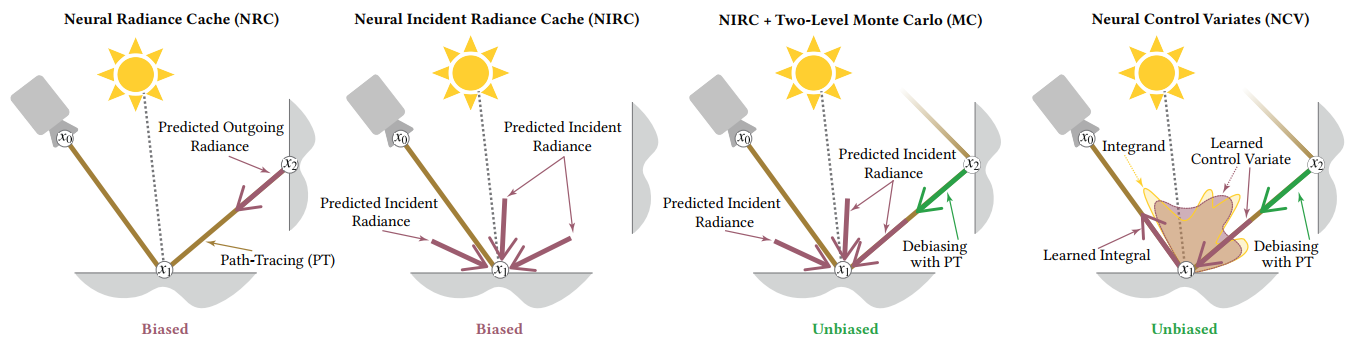
- 和 NRC 类似的思路,但是缓存入射辐射场 NIRC
- 两步 MC 算法(Two-Level Monte Carlo,subset of Multi-Level Monte
Carlo,MLMC)
- 先估计积分,然后估计残差
- 估计积分使用 Neural Incident Radiance Cache(NIRC)
- 估计残差使用 NIRC + PT
- 在线学习
- 实现上做了一些优化,推理更快
Introduction
- 一些对比
- NIRC 直接缓存 incident radiance,比 NRC 少一次光追开销
- biased 版本:提出了一种新的路径终止策略【Balanced Termination
Heuristic(BTH)】
- NRC 的 Spread Angle Heuristic(SPH)不能直接在第一跳使用缓存
- 感觉确实和 CV 很像;论文中说 CV 用的一般是解析模型(SH、vMF)近似【NCV 也是近似一个分布】
- MLMC+NIRC 在短训练时间下比 CV 效果更好
- 比 NRC 更高效【具体看论文】
- 环境光特殊使用,同时近似可见性
Background
- 渲染方程、MC 求解
- Multi-Level Monte Carlo(MLMC)
- \(F_c\):NIRC
- \(\mathbf{w}\) 表示可学习的参数
- \(F_r\):残差的 MC 估计
- 二者可以用不同的样本数,只要 \(F_c\) 的期望存在,那么 \(F_{tl}\) 就是无偏的
- \(F_c\):NIRC
\[ F_c \approx \frac{1}{N_c} \sum_{i}^{N_c} \frac{f_c(X_i, \mathbf{w})}{p_c(X_i)} \tag{4} \]
\[ F_r \approx \frac{1}{N_r} \sum_{i}^{N_r} \frac{f(Y_i) - f_c(Y_i, \mathbf{w})}{p_r(Y_i)} \tag{5} \]
\[ F_{tl}\approx F_c+F_r \tag{6} \]
- Control Variates(CV)
- 形式很像,但是一般来说 \(F_c\) (期望)是数值计算得到的
Related Work
- Radiance Caching
- Neural Methods
- Neural Control Variates
NIRC
- Neural Incident Radiance Cache
- 拆分为直接光和间接光,需要和 NEE 做 MIS
- 这个写法感觉怪怪的?感觉不如直接写成两种策略,但是式子 9 又没有 MIS 权重
\[ L_i(x, \omega_i) = L_{ind}(x, \omega_i) + L_{nee}(x, \omega_i) \tag{8} \]
- 间接光使用 NIRC【\(n_i\)】
- \(\phi\) 表示辅助信息
\[ L_{ind} \approx f_c(x, \omega_i, \omega_o, \phi, \mathbf{w}) = n_i(x, \omega_i, \phi, \mathbf{w}) f_r(x, \omega_i, \omega_o) \cos\theta_i \tag{9} \]
- 展开渲染方程
- 有偏的就是直接不管残差项
\[ \hat{L}_o(x, \omega_o) \approx L_e(x, \omega_o) + \hat{L}_{nee}(x, \omega_o) + \hat{L}_c(x, \omega_o) + \hat{L}_r(x, \omega_o) \tag{10} \]
\[ \hat{L}_{\text{biased}}(x, \omega_o) \approx L_e(x, \omega_o) + \hat{L}_{nee}(x, \omega_o) + \hat{L}_c(x, \omega_o) \tag{13} \]
Radiance Cache Optimization
- 损失函数两个部分
- 残差项的方差最小化
- 残差项的期望最小化
方差
- 单样本方差;方差估计直接使用 MC 样本【同一个采样 pdf \(p_r\)】
\[ \left\langle \mathcal{L}_{\mathbb{V}}(f, f_c, \mathbf{w}) \right\rangle \approx \left( \frac{f(x) - f_c(x, \mathbf{w})}{p_r(x)} - F_r \right)^2 \tag{16} \]
\[ F_r = \mathbb{E} \left[ \frac{f(X) - f_c(X, \mathbf{w})}{p_r(X)} \right] \]
期望
- 只用方差的话,biased 版本效果差
\[ \left\langle \mathcal{L}_{\text{rel}}^2(f, f_c, \mathbf{w}) \right\rangle = \frac{(f(x) - f_c(x, \mathbf{w}))^2}{p_r(x) \left( \text{sg}(f_c(x, \mathbf{w}))^2 + \epsilon \right)} \tag{18} \]
- 原理就是让 \(\int(f(x) - f_c(x, \mathbf{w}))^2\;\mathrm{d}x\) 最小【分母是为了补偿暗区域】
Path Termination Heuristics
- NRC
\[ \begin{align} a(x_1 \cdots x_n) &= \left( \prod_{i=2}^{n} \frac{\| x_{i-1} - x_i \|}{p(\omega_i | x_{i-1}, \omega) \cos\theta_i} \right)^2 \tag{19} \\ \\ a_0 &= \frac{\| x_0 - x_1 \|^2}{4\pi \cos\theta_1} \tag{20}\\ \\ a(x_1 \cdots x_n) &>c\cdot a_0 \tag{21} \end{align} \]
- 扩展,使得可以在 primary hit 终止
- 从平衡启发式得到灵感
- NIRC glossy 处理不好,将其认为是 virtual diffuse 采样方法
\[ P_s = \frac{p(\omega_i)}{p(\omega_i) + \dfrac{N_c}{\pi}} \tag{22} \]
- 终止条件 BTH
\[ \begin{align} i = 1: &\quad \text{stop if } \xi > P_s, \notag \\ i > 1: &\quad \text{stop if } \xi > P_s \text{ or } a(x_1 \cdots x_i) > c \cdot a_0, \tag{23} \end{align} \]
Cache Application
- megakernel
- 估计 \(L_c,L_r\) 的时候,使用独立的 BSDF 采样
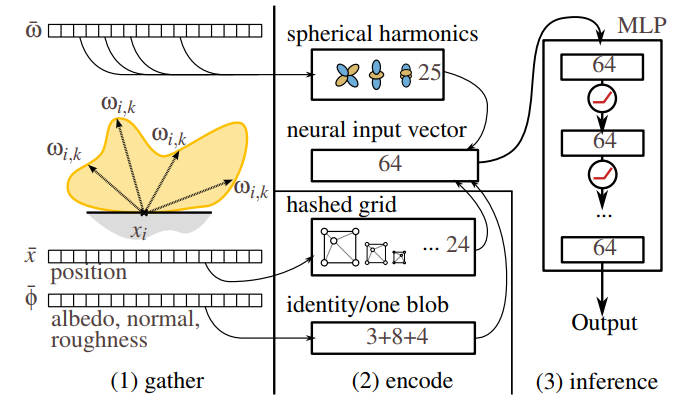
Neural Network Architecture
- 输入:64 d
- 位置:hash grid【12 level x 2 features】【24】
- 方向:4 阶 SH【25】
- albedo:identity【3】
- normal:one-blob【8】
- roughness:one-blob【4】
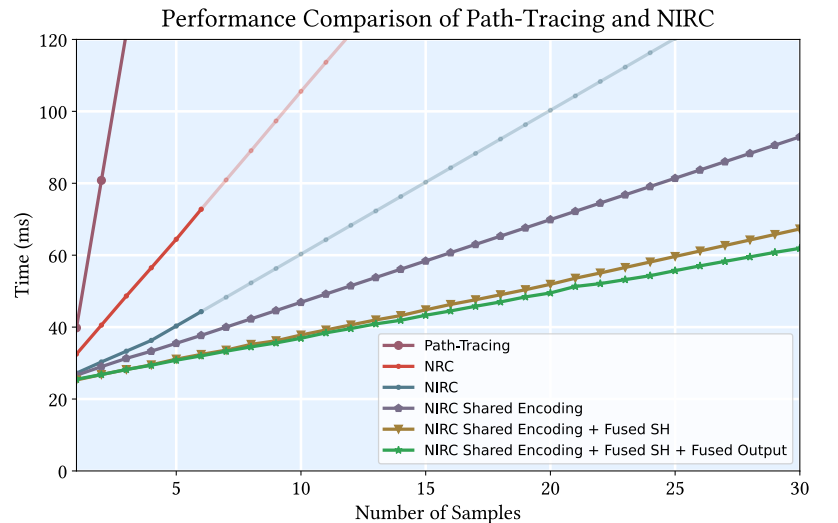
Performance Optimization
- hash encoding 需要获取离散的位置
- 优化:将相同的 shading surface 的 request 一起做
- \(\phi\) 同样可以这么优化
- SH 优化【代码开源了仔细学学】
- full-fused,不存到 global memory,直接保存到 shared memory
- packing + compressing 方向分量能最大化系统带宽
- tcnn 输出的时候不使用临时 buffer【这个我也这么用了,是有优化的】
- 优化提升:3.64x speedup【!!!】
- sample count 表示 NIRC 样本数
- 训练路径、渲染路径分开 kernel
- 训练路径长、渲染路径短【megakernel divergence 大】
- 实现方便,而且提升了效率
Neural Visibility Cache
- 估计环境光的可见性,0-1 实数,sigmoid 激活函数
Results
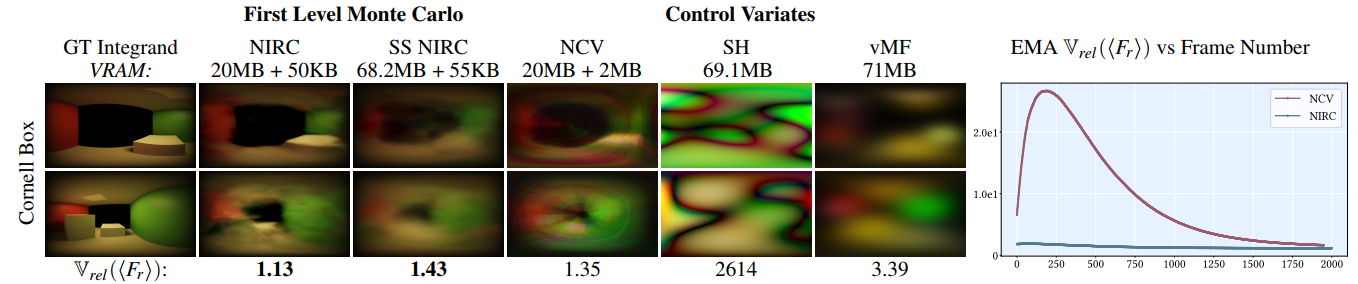
MLMC vs CV
- 公平对比:每个像素维护自己的参数
- 720p
- Falcor 7 + Pytorch(TCNN bindings)
- CV:SH、vMF【内存相当】
- vMF:11 lobes per pixel \(\times\)
7 coeffs
- 初始化:spherical Fibonacci lattice
- 优化:stepwise-EM
- SH:5 阶
- vMF:11 lobes per pixel \(\times\)
7 coeffs
- Screen Space NIRC(SS NIRC)
- 输入修改为 one latent vector per pixel
- 6 层
- 训练帧数:4000【面向实时】
- 学习的不仅是 incident radiance,而是整个积分【上面不是说 radiance 吗?实现上无所谓】
- 和 NCV 对比:开源
NIS 代码【但是 NCV
本身比较也不能这么比吧,他也是优化残差的方差,下图比较合理吗?】
- NCV 需要另外一个网络近似 BSDF
- NCV 需要访问 MLP 18 次,NIRC 1 次
- 同内存比较
Evaluation
- Falcor 4.4(D3D12),TCNN(cuda)
- NIRC
- 4 layers 64 neurons、ReLU、Adam(lr=0.01)
- 因为快了,所以每帧优化 4 次
- NRC 只访问一次网络【原论文一样】
- 训练和 NRC 相同【不使用 self-training strategy,因为效果不好】
- 1080P,RTX3080,i7-12700k CPU 32G
- MRSE、FLIP
- NEE 开,light BVH
- RR(0.1 终止)
- 版本
- unbiased:前 3 non-specular 跳使用预定义样本数【per-scene】访问网络,使用完整 PT 估计残差
- biased:使用 BTH 终止 NIRC;SPH 终止 NRC【不估计残差】
- NIRC 少光追一次,因此可以有多个样本访问网络

- Environment map lighting:不用环境光前提下也比 NRC 好【额外实验】
- NIRC 的样本数
- 目前只在前 3 non-specular 跳使用 NIRC;实验没有显示出使用更多跳数的好处
- 具体 NIRC 的样本数也是个研究话题【论文给了一些例子】
- Memory consumption
- surface parameter buffer:9 floats
- encoded parameter buffer:39 half
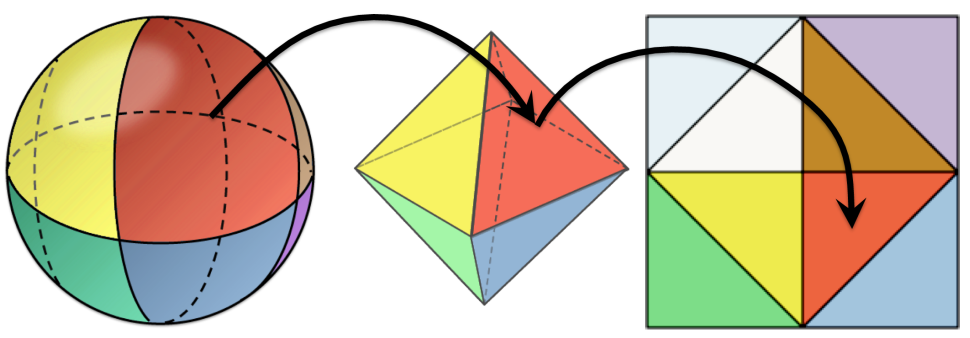
- encoded parameter buffer:4 bytes each direction【转化为下图的 (u,v),估计是两个 half】
- 前 3 跳一共 25 个样本
- 1080P 大概 879.1 MB
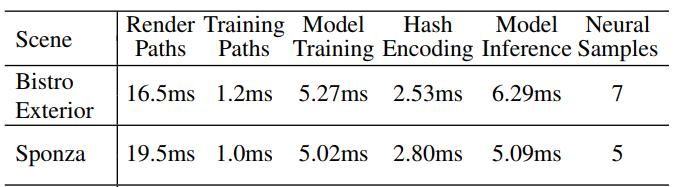
- 大概开销分布
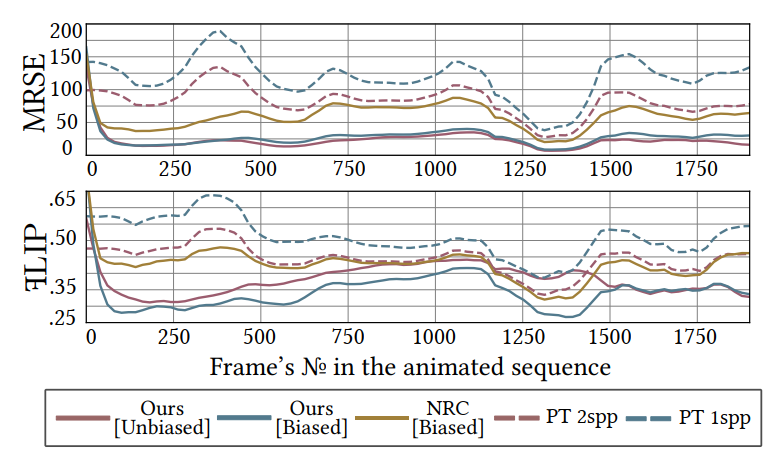
- 动态场景支持
- 20 帧之后就比 PT 好了【GT 1k spp】
- Neural Visibility Cache(NVC)【这个估计的得看环境光的具体实现了】
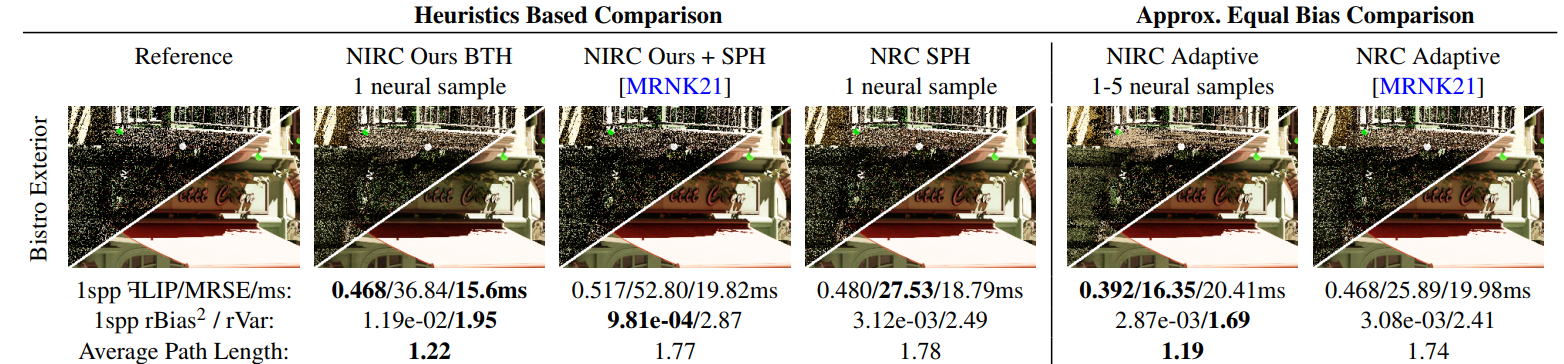
Cache Analysis
- NIRC vs NRC:bias,variance,path length,render time
- 实验
- RTX 4080,32GB RAM
- NEE off,无环境光
- train 2000 frames with 4 epochs
Discussion and Future Work
- 提高 NIRC 质量【incident radiance 比较复杂】
- 结合 NRC 和 NIRC
- ReSTIR
- MLMC 在哪里使用
- MLMC 引入方差,近似的好的地方不需要用 MLMC
- 更好适配动态场景
- NN 陷入局部最值
- 多层级的 MC【小的 MLP 作为低层级】
- 残差有负值
- 需要引入 path guiding 的时候,需要考虑这个
- rel L2 loss 不够
- 引入 tone mapping、perceptual loss
- 减小梯度噪声
- In Place Execution【内存问题】