(论文)[2022-SIG] Unbiased and consistent rendering using biased estimators
Unbiased and consistent rendering using biased estimators
- 代码
- 论文提出了两种使用有偏估计构建无偏(或一致)估计的方法,分别是通过泰勒展开和伸缩和实现
- 其实重要的就是上面两个思想
- 并根据这个理论实现了 3 个应用:可微渲染中的有限差分、体渲染中的 transmittance 估计、无偏光子映射
Introduction
- 渲染中有很多情况都需要估计积分值
- 虽然有很多无偏估计,但是很多时候还是得用到有偏估计
- 假定我们有 \(I\)
的可控的有偏估计 \(\langle{I(k)}\rangle\)
- \(k\) 可以是离散的、连续的
- \(I(\infty)\) 不能被直接计算(复杂度太高),智能计算有限值
\[ \lim_{k\to\infty}I(k)=I\tag{1} \]
- 将误差表示为无限和的形式
- \(B(k):=I-I(k)\)
\[ I = I(k) + \underbrace{\sum_{j = k}^{\infty} \Delta_j}_{B(k)} \tag{2} \]
Taylor-Series Debiasing
- 需要估计的积分可能在一个非线性函数中
- 例如倒数,用于估计归一化因子:\(g(x)=\dfrac{1}{x}\)
- 直接使用 MC 进行估计导致有偏
- 在数学上这类问题被称为:期望的函数(functions of expectations)
\[ I := g(F) = g\left(\int_{\Omega} f(x) \, \mathrm{d}x\right). \tag{3} \]
- 假定 \(f\) 有限,在 \(\alpha\) 处有收敛的泰勒展开
- \(g^{(j)}\) 表示 \(j\) 阶微分
- 这里使用 Taylor 的前 \(k\) 项作为有偏估计,剩余项作为偏差
\[ I := g(F) = \underbrace{\sum_{j = 0}^{k - 1} \Delta_j^{\mathrm{tay}}}_{I(k)} + \underbrace{\sum_{j = k}^{\infty} \Delta_j^{\mathrm{tay}}}_{B(k)}, \text{ with } \Delta_j^{\mathrm{tay}} = g^{(j)}(\alpha) \frac{(F - \alpha)^j}{j!}, \quad (4) \]
- 示例如下:\(g(x)=\dfrac{1}{x}\)
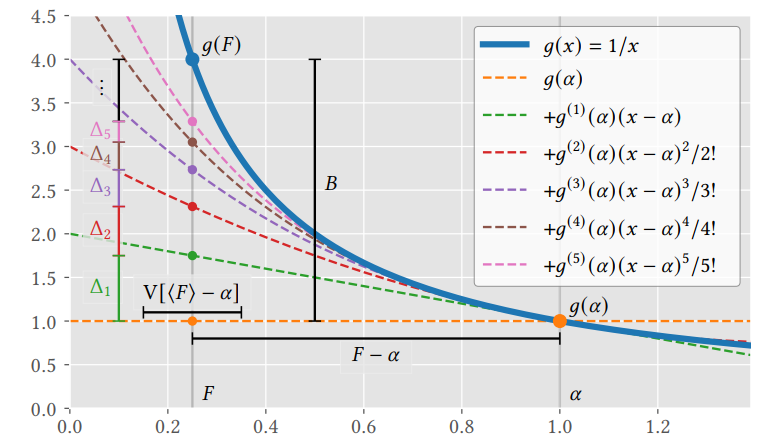
- 泰勒展开去除了复杂的非线性项,将 \(g\) 和 \(f\) 的计算分开了
- \((F-\alpha)^j\) 的计算可以作为 \(j\) 个独立的 \(F-\alpha\) 的乘积
之前工作
- 形式上已经有人在图形学中用过了,但是是从其他数学形式推导过来的
- 接下来这里讲如何转化为 Taylor 的推导形式
倒数估计
\[ g(F) := \dfrac{1}{F}\tag{5} \]
- 令 \(k=1\),于是有
\[ g(F) = \frac{1}{\alpha} + \sum_{j = 1}^{\infty} \Delta_j^{\mathrm{recip}}, \quad \text{where} \quad \Delta_j^{\mathrm{recip}} = \alpha^{-j - 1} (\alpha - F)^j, \tag{6} \]
- 这里说了一些之前的应用
- [2007] Unbiased Monte Carlo Estimation of the Reciprocal of an
Integral
- Booth
- 最早,但不是图形学
- 分析方式:Control Variates + Maclaurin 级数
- [2015-TOG] Unbiased Photon Gathering for Light Transport Simulation
- [2019-TOG] Integral Formulations of Volumetric Transmittance
- [2020-TOG] Specular Manifold Sampling for Rendering High-Frequency Caustics and Glints
- [2020-TOG] Path Tracing Estimators for Refractive Radiative Transfer
- [2007] Unbiased Monte Carlo Estimation of the Reciprocal of an
Integral
指数透射率估计
- Exponential-transmittance estimation
- 体渲染中的核心
\[ g(F) := e^{-F}\tag{7} \]
\[ F=\tau := \int_{a}^{b}\mu(x) \]
- 令 \(k=1\)
\[ g(F) = \mathrm{e}^{-\alpha} + \sum_{j = 1}^{\infty} \Delta_j^{\mathrm{exp}}, \quad \text{where} \quad \Delta_j^{\mathrm{exp}} = \mathrm{e}^{-\alpha} \frac{(\alpha - F)^j}{j!}, \tag{8} \]
- 如下论文都提出了等价形式,但是他们都是参考 Booth2007
的方式分析得到的
- [2019-TOG] Integral Formulations of Volumetric Transmittance
- [2020-TVCG] Direct Transmittance Estimation in Heterogeneous Participating Media Using Approximated Taylor Expansions
- [2021-ARXIV] An Unbiased Ray-Marching
Transmittance Estimator
- 类似形式
Inital Value & Telescoping-Series Debiasing
- Taylor 展开的问题(下面情况不适用)
- 不够平滑不好展开
- 没有收敛的泰勒展开的形式
- 需要新的解决方案
连续形式
\(k\) 是连续的
对 式子2 进行变形
\[ I = I(k) + B(k) = I(k) + I(\infty) - I(k)\tag{9} \]
- 假定函数 \(I\) 的微分存在,此时转化为初值问题
\[ I = I(k) + \int_{k}^{\infty} \frac{\mathrm{d}}{\mathrm{d}x} I(x) \, \mathrm{d}x\tag{10} \]
离散形式
- 将微分转化为单位长度积分,然后使用不定积分替代,得到式子 12
\[ I = I(k) + \sum_{j=k}^{\infty}\int_{j}^{j+1} \frac{\mathrm{d}}{\mathrm{d}x} I(x) \, \mathrm{d}x\tag{11} \]
\[ I = I(k) + \sum_{j = k}^{\infty} \Delta_j^{\mathrm{tele}}, \quad \text{where} \quad \Delta_j^{\mathrm{tele}} = I(j + 1) - I(j)\tag{12} \]
- 此时得到伸缩和(telescoping sum)
之前工作
Path Tracing:将 \(k\) 看成路径长度
Volterra transmittance:体渲染 transmittance 计算
- 代入 式子10
- 我们这里通过伸缩和推导得到,原始论文通过 radiative transfer equation 推导得到(不容易扩展到 non-exponetial transmittance)
\[ I=\text{Tr}(k,b) := \exp{(-\int_{k}^{b}\mu(y)\;\mathrm{d}y)} \]
\[ \begin{align} \mathrm{Tr}(k, b) &= \mathrm{Tr}(k, k) + \int_{k}^{b} \frac{\mathrm{d}}{\mathrm{d}x} \mathrm{Tr}(x, b) \, \mathrm{d}x \\ &= 1 - \int_{k}^{b} \mu(x) \mathrm{Tr}(x, b) \, \mathrm{d}x \end{align}\tag{13} \]
Estimation and Convergence
- 构建 debiased and consistent 的估计,流程如下
Primary estimators
这里说的都是离散形式,连续形式类似 式子10
Single-term estimator
- 通过 \(p(j)\) 采样 \(j\)
- \(p(j)\) 表示的是 PMF(probability mass function)
- 证明根据定义即可
\[ \langle I \rangle_1^k = \langle I(k) \rangle + \langle B(k) \rangle = \langle I(k) \rangle + \frac{\langle \Delta_j \rangle}{p(j)}\tag{14} \]
- Prefix-sum estimator
- \(P(j\ge i)\) 表示的是 CMF(cumulative mass function)
- 通过 \(p(j)\) 采样 \(j\)
\[ \langle I \rangle_1^k = \langle I(k) \rangle + \langle B(k) \rangle = \langle I(k) \rangle + \sum_{i = k}^{j} \frac{\langle \Delta_i \rangle}{P(j \geq i)}\tag{15} \]
- 证明:考虑 \(\dfrac{\langle \Delta_i
\rangle}{P(j \geq i)}\) 出现的概率
- \(p(i)+p(i+1)\cdots\)
- 消去分母,得证
\[ \mathbb{E}[\langle I \rangle_1^k ]=\langle I(k) \rangle +\sum_{j=k}^{\infty}p(j)\sum_{i = k}^{j} \frac{\langle \Delta_i \rangle}{P(j \geq i)} \]
Secondary Estimator
\[ \langle I \rangle_N = \frac{1}{N} \sum_{i=1}^N \langle I \rangle_1^{k_i}\tag{16} \]
一般来说,设置 \(k_i=k\) 为常数就够了
因为 primary estimator 是无偏的的,因此不管 \(k_i\) 为多少,结果都是无偏的
- 例如设置为 progressive(\(k=i\))
Step 1 ok
Estimation under Finite Variance
- primary estimator 是无偏的,于是只要他的方差是有限的,那么 secondary
estimator 的方差就是 \(O(1/N)\)
的(中心极限定理保证)
- 常数项依赖于 \(\langle{\Delta_j}\rangle\) 和 \(p(j)\) 的选择
- 试图让效率最大,等价于
\[ \underset{p(j)}{\arg \min} \, \text{Var}[\langle I \rangle_1] \, \text{C}[\langle I \rangle_1]\tag{17} \]
但是这很难,更加实际的做法是最小化方差,然后再去判断是否满足 finite work-normalized variance
如下选择满足方差最小,证明见附录A
- 2013 Rhee 证明了这在离散伸缩和成立;2015 Blanchet 证明了对泰勒展开也试用
\[ p(j)\propto \sqrt{V[\langle{\Delta_j}\rangle]+\left(\Delta_j\right)^2}\tag{18} \]
- 式子 18 更加适用,即便我们不能确切知道 \(V\left[\langle{\Delta_j}\rangle\right]\) 和
\(\Delta_(j)\),但是我们通常可以获取到他们的渐进率(asympotric
rate)
- 然后构建 PMF
- 接着判断 \(p(j)\) 能否归一化,能则 ok
- 不能,判断 \(C\left[\langle{I}\rangle_1\right]\) 是否有限,有限则 ok
- 如果上面处理都不行,则还是会导致无限方差
Estimation under Infinite Variance
- primary 是无偏的,弱大数定律保证 secondary 依概率收敛到 \(I\)
- 注意这里不要求 primary 的方差是有限的,但是渐进收敛率会慢于 \(O(1/N)\)
- 此时我们可以选择构建无偏(但是方差大)的估计,或者构建一致(但是有偏)的估计
证积分例子
\[ \int_{0}^{1}\dfrac{1}{x^{\alpha}\;\mathrm{d}x} \]
- 对于任意的 \(\alpha\in(0,1)\),结果都是 \(\dfrac{1}{1-\alpha}\)
- 使用均匀采样
- \(\alpha\in(0,\dfrac{1}{2})\):有限方差
- \(\alpha\in[\dfrac{1}{2},1)\):无穷方差
- 方差分析:\(p(x)=1\)
- 于是当前 \(\alpha\in[\dfrac{1}{2},1)\) 的时候,方差是无穷的
- secondary 误差是 \(\text{Var}[\langle I\rangle_1]/N\)
\[ \text{Var}[\langle I\rangle_1]=\int_0^1\dfrac{1}{x^{2\alpha}}\;\mathrm{d}x-\dfrac{1}{(1-\alpha)^2} \]
无偏估计
- 找 \(p_j\) 让 \(\mathrm{V}\) 增长到无穷的速度尽可能慢
- 很难找到好的策略
- 替代方法:很多应用中 \(\mathrm{V}\) 和 \(\mathrm{C}\) 是反相关的,牺牲 \(\mathrm{C}\) 来降低 \(\mathrm{V}\)
一致估计
- 副录 E 说明,不需要考虑 \(B(k)\) 细节,结果都是一致的
- 思路和 PPM(progressive photon mapping)很像
- 先构建无偏的估计,然后根据信息重参数化 \(k\)
- 让 \(V(k_i)=\mathrm{V}[\langle I(k_i)\rangle]\) 的增长速度慢于 \(i\)(让 secondary 的方差消失)
- 让 error 收敛率最大的 \(k\) 满足:\(O(V(k_i))=k\cdot O(B^2(k_i))\)【具体分析看副录 B】
应用
Finite differences
\[ I := \frac{\partial F(x)}{\partial x} = \frac{\partial}{\partial x} \int_{\Omega} f(x, y) \, \mathrm{d}y\tag{19} \]
- 例如 \(f(x,y)\) 是参数 \(x\) 下路径 \(y\) 贡献【可微】
- \(\Omega\) 可能和 \(x\) 相关
- 有限差分在可微渲染中不实用,一般作为一个 baseline
- 有限差分是有偏的,将其作为 GT 不太好
- 于是我们方法有用了
- 根据上面的方法
- 先构建有偏估计
- 是一致的,当 \(k\to\infty\Rightarrow h_k\to0\)
- 我们取 \(h_k\propto2^{-k}\)
- 定义域不同是因为可能依赖于 \(x\)
\[ \frac{\partial F(x)}{\partial x} \approx I(k) := \frac{1}{h_k} \left( \int_{\Omega_1} f(x + h_k, y_1) \, \mathrm{d}y_1 - \int_{\Omega_2} f(x, y_2) \, \mathrm{d}y_2 \right) \tag{20} \]
- 伸缩和
\[ I = I(k) + \underbrace{\sum_{j = k}^{\infty} \Delta_j^{\mathrm{FD}}}_{B(k)}, \quad \text{where} \quad \Delta_j^{\mathrm{FD}} = I(j + 1) - I(j) \tag{21} \]
- 使用 single-term 估计(完成 Step 1)
无偏估计
- \(f(x,y)\) 有限,对 \(x\) 连续可微,\(\Omega\) 和 \(x\) 无关的情况下
- 此时,理想情况下能用一个样本 \(y\) 进行估计(如下省略 \(y\))
\[ \langle \Delta_j^{\mathrm{FD}} \rangle = \frac{\langle f(x + h_{j + 1}) \rangle - \langle f(x) \rangle}{h_{j + 1}} - \frac{\langle f(x + h_{j}) \rangle - \langle f(x) \rangle}{h_{j}}\tag{47} \]
- \(f(x+h)\) 3阶泰勒展开,代入上式
\[ \langle \Delta_j^{\mathrm{FD}} \rangle = (h_{j + 1} - h_{j}) \left\langle \frac{\partial^2}{\partial x^2} f(x) \right\rangle + O(h_{j + 1}^2) - O(h_{j}^2) \tag{49} \]
- 忽略高阶项,于是有
\[ \Delta_j^{\mathrm{FD}} \propto (h_{j + 1} - h_{j}), \quad \text{and} \quad \mathrm{V}[\langle \Delta_j^{\mathrm{FD}} \rangle] \propto (h_{j + 1} - h_{j})^2 \tag{50} \]
- 用式子 18 的结论,我们得到 \(p(j)\propto 2^{-j}\)
- 因为 cost 是常数,于是 Step 4,得到有限方差的无偏估计
- 例子:对 roughness 的梯度估计
一致估计
- \(f(x,y)\) 对 \(x\) 不是连续可导【例如可见性】,此时 primary 可能存在无限方差
- Step 5 构建无偏估计,但是方差太大导致高噪声无法使用
- Step 6 构建一致估计
- 如果 \(\Omega\) 不依赖于 \(x\),构造如下
- 此时能用一个样本 \(y\) 进行估计(如下省略 \(y\))
\[ \begin{align} \langle I(k) \rangle &= \frac{\langle f(x + h_k) - f(x) \rangle}{h_k} = \frac{1}{h_k} \int_{x}^{x + h_k} \left\langle \frac{\partial}{\partial x} f(t) \right\rangle \, \mathrm{d}t \tag{51} \\ &= \int_{-\infty}^{\infty} K(x - t) \left\langle \frac{\partial}{\partial x} f(t) \right\rangle \, \mathrm{d}t, \quad \text{where} \tag{52} \\ K(\tau) &= \begin{cases} \frac{1}{h_k} & 0 < \tau < h_k \\ 0 & \text{otherwise} \end{cases} \quad \text{is a normalized box kernel.} \tag{53} \end{align} \]
- 效果上是 blur 了
- 收敛慢,需要 \(h_k\to0\)
Non-exponential transmittance
伸缩和
\[ \begin{aligned} &I := g(F) = \underbrace{I(k)}_{\text{biased transmittance estimate}} + \underbrace{\sum_{j = k}^{\infty} \Delta_j^{\mathrm{RM}}}_{\text{bias } B(k)},\\ &\text{with} \quad \Delta_j^{\mathrm{RM}} = I(j + 1) - I(j) \end{aligned} \tag{22} \]
- \(I(k)\) 通过 raymarching
估计,使用单调递减序列
- 数值方法也 ok,主要满足一致性条件
- PMF:\(p(j)=r(1-r)^j\)【\(r=0.65\)】
- ray marching step size \(s_j\propto
2^{-j}\)
- 可以同时评估 \(\langle I(j+1)\rangle,\langle I(j)\rangle\)
- 进一步减小方差
- \(N\)个样本估计 \(\langle I(j+1)\rangle\)
- 替换为两组 \(N/2\)个样本估计 \(\langle I(j)\rangle\) 然后平均
- 实验测试,我们的算法和 regular tracking 相比是无偏的,渐近收敛率
\(O(1/N)\)
- 测试了指数模型和 Davis and Mineev-Weinstein 模型
\[ g(F) := \left(1 + F^{\beta} C^{1 + \beta}\right)^{-\dfrac{F^{1 - \beta}}{C^{1 + \beta}}} \tag{23} \]
泰勒级数
- Taylor series for pink-noise transmittance
- pink noise,式子23 \(\beta=1\)
\[ g(F) := \left(1 + FC^{2}\right)^{-\dfrac{1}{C^{2}}} \tag{24} \]
- 泰勒级数
\[ \begin{align} I := g(F) &= \underbrace{\sum_{j = 0}^{k - 1} \Delta_j^{\mathrm{pink}}}_{I(k)} + \underbrace{\sum_{j = k}^{\infty} \Delta_j^{\mathrm{pink}}}_{B(k)}, \quad \text{where} \tag{25} \\ \Delta_j^{\mathrm{pink}} &= \frac{(\alpha - F)^j}{j!} \left(1 + \alpha C^2\right)^{\frac{-1}{C^2} - j} \prod_{i = 1}^{j - 1} \left(1 + i C^2\right). \end{align} \]
- 使用 RR 间接定义 \(p(j)\)
\[ P_{\mathrm{acc}}(j) = \frac{1 + (j - 1)C^2}{j}, \quad p(j) = (1 - P_{\mathrm{acc}}(j)) \prod_{i = 0}^{j - 1} P_{\mathrm{acc}}(i). \tag{26} \]
- 可以使用 2021 论文中的减小方差方式
- fixed step-size (0.2) to estimate \(\langle{F}\rangle\)
- \(k=3\)
- 只用 \(P=0.1\) 比例的时间估计 bias
- 实验对比了 pink-noise,指数的 transmittance
- 比之前方法一致的好
Photon mapping
- 一致的:半径 \(r\to0\)
- 存在无偏的 PM,不能处理 purely specular caustics
- \(k\) 映射到单调递减的 \(r_k\)
\[ I = I(k) + \underbrace{\sum_{j = k}^{\infty} \Delta_j^{\mathrm{PM}}}_{B(k)}, \quad \text{where} \quad \Delta_j^{\mathrm{PM}} = I(j + 1) - I(j) \tag{27} \]
- 已知的 PPM 理论,我们无法同时实现 Step 3&4【不能 sublinear
无偏】
- 具体看副录 C
- Unbiased PM:和传统 PM 相比,噪声代替了糊
- \(k_i=k\)
- cone kernel
- correlate all kernel evaluations:估计 \(\langle I(j+1)-I(j)\rangle\),代替估计
\(\langle I(j+1)\rangle-\langle
I(j)\rangle\)
- 使用相同的样本
- \(p(j)\propto O(j^{\alpha-2})\),全局样本数 \(O(j^{1-c\alpha})\)【\(c=1.001,\alpha=2/3\)】
- 半径设置【代码看的】:\(r_i=r_0\times\sqrt{(i+1)^{\alpha-1}}\)
- Unbiased PPM
- \(k_i=i\)
- 和之前的 PPM 相比,多估计了 bias 这个部分
- 收敛率分析:好像也没好,只能说 Unbiased PM 和之前的差不多
Future Work
- 当泰勒展开和伸缩和都能用的时候,该用哪个?
- 得看问题
- 我们的方法能搞出更高效的倒数评估算法
- Russian Roulette 和式子 12 是等价的
- 我们的算法和 ADRRS 结合可能有搞头
副录
Appendix A
连续情况
- 无偏,因此方差最小等价于二阶矩最小
\[ \mathrm{E}\left[ \left( \frac{\langle \Delta_j \rangle}{p(j)} \right)^2 \right] = \int_{k}^{\infty} \frac{\mathrm{E}\left[ \langle \Delta_x \rangle^2 \right]}{p(x)^2} p(x) \, \mathrm{d}x = \int_{k}^{\infty} \frac{\mathrm{E}\left[ \langle \Delta_x \rangle^2 \right]}{p(x)} \, \mathrm{d}x \tag{28} \]
- 求解带约束的变分问题:Euler-Lagrange equation from the calculus of
variations
- \(\int_k^{\infty}p(x)\;\mathrm{d}x=1\)
\[ \mathcal{L}(x, \lambda, p) = \frac{\mathrm{E}\left[ \langle \Delta_x \rangle^2 \right]}{p(x)} + \lambda p(x) \tag{29} \]
- \(\mathcal{L}\) 中不包含 \(p'\)
\[ \begin{align} \frac{\mathrm{d} \mathcal{L}}{\mathrm{d} p} - \frac{\mathrm{d}}{\mathrm{d} x} \underbrace{\left( \frac{\mathrm{d} \mathcal{L}}{\mathrm{d} p^\prime} \right)}_{=0} = 0\quad &\Leftrightarrow \quad -\frac{\mathrm{E}\left[ \langle \Delta_x \rangle^2 \right]}{p^2(x)} + \lambda = 0 \tag{30} \\ & \Leftrightarrow \quad p(x) = \sqrt{\frac{\mathrm{E}\left[ \langle \Delta_x \rangle^2 \right]}{\lambda}} \tag{31} \end{align} \]
- 于是得到结论,式子 18
离散形式
- 直接使用拉格朗日乘子即可
\[ \mathrm{E}\left[ \left( \frac{\langle \Delta_j \rangle}{p(j)} \right)^2 \right] = \sum_{j = k}^{\infty} \frac{\mathrm{E}\left[ \langle \Delta_j \rangle^2 \right]}{p(j)} \tag{33} \]
\[ \mathcal{L}(\lambda, p) = \sum_{j = k}^{\infty} \frac{\mathrm{E}\left[ \langle \Delta_j \rangle^2 \right]}{p(j)} - \lambda \left( 1 - \sum_{j = k}^{\infty} p(j) \right) \tag{34} \]
\[ \begin{align} \frac{\partial \mathcal{L}}{\partial p(j)} = 0 \quad &\Leftrightarrow \quad -\frac{\mathrm{E}\left[ \langle \Delta_j \rangle^2 \right]}{p(j)^2} + \lambda = 0 \tag{35} \\ &\Leftrightarrow \quad p(j) = \sqrt{\frac{\mathrm{E}\left[ \langle \Delta_j \rangle^2 \right]}{\lambda}} \tag{36} \end{align} \]
Appendix B
- secondary 一致性条件
\[ \lim_{N \to \infty} \text{MSE}[\langle I \rangle_N] = \lim_{N \to \infty} \left( V[\langle I \rangle_N] + B[\langle I \rangle_N]^2 \right) = 0. \tag{37} \]
- 于是收敛条件为下面同时满足
\[ \begin{align} \lim_{N \to \infty} V[\langle I \rangle_N] &= \lim_{N \to \infty} \frac{1}{N^2} \sum_{i = 1}^{N} \underbrace{V[\langle I(k_i) \rangle]}_{V(k_i)} = \frac{O(V(k_N))}{N} = 0, \tag{38} \\ \lim_{N \to \infty} B[\langle I \rangle_N] &= \lim_{N \to \infty} \frac{1}{N} \sum_{i = 1}^{N} \underbrace{B[\langle I(k_i) \rangle]}_{B(k_N)} = O(B(k_N)) = 0, \tag{39} \end{align} \]
- 一致性条件:需要 \(B(k)\) 消失,\(V(k)\) 的增长小于 \(O(N)\)
- 满足上面两个条件的,MSE 收敛最快的条件为两项同阶
\[ O(V[\langle I \rangle_N]) = O(B[\langle I \rangle_N]^2)\Longrightarrow O(V(k_N)) = N\cdot O(B^2(k_N)) \]
Appendix C
- 没太看懂
- 条件
- \(M_k\) 光子数,收集半径 \(r_k\)
- 使用 single-term 伸缩和
- 相关性的估计 \(\langle \Delta_j\rangle=\langle I(j+1)-I(j)\rangle\)【复用样本】
- \(M_{j+1}\ne M_j\) 的话,忽略 unshared 光子
- 这样能用 PPM 的理论
- 【没看 PPM 的理论分析】
\[ \begin{align} V[\langle \Delta_j \rangle] &\propto \frac{1}{M_j} \int \left( k(r_{j + 1}, x) - k(r_j, x) \right)^2 \mathrm{d}x, \tag{40} \\ \Delta_j &\propto r_j^2, \tag{41} \end{align} \]
- \(r_j=\sqrt{j^{\alpha-1}},\alpha\in(0,1)\) 都能实现一致估计
- 此时
\[ \begin{align} \Delta_j &= O(j^{\alpha - 2}) \tag{42} \\ V[\langle \Delta_j \rangle] &= M_j^{-1} O(j^{-\alpha}), \quad \text{(constant kernel)} \tag{43} \\ V[\langle \Delta_j \rangle] &= M_j^{-1} O(j^{-\alpha - 1}). \quad \text{(cone kernel)} \tag{44} \end{align} \]
- 然后最优 PMF 如下
\[ p(j) \propto \sqrt{V[\langle \Delta_j \rangle] + (\Delta_j)^2} = \sqrt{M_j^{-1} O(j^{-\alpha - 1}) + O(j^{2\alpha - 4})} \tag{45} \]
- 代价无限:找不到合适的 \(\alpha,M_j\) 满足有限
\[ C[\langle I \rangle_1] \propto \sum_{j = 1}^{\infty} M_j \cdot p(j) \propto \sum_{j = 1}^{\infty} \sqrt{M_j O(j^{-\alpha - 1}) + M_j^2 O(j^{2\alpha - 4})} \tag{46} \]
Appendix E
- \(k_i=i\),于是有
\[ \begin{align} I &= \frac{1}{N} \sum_{k = 0}^{N} \left( I(k) + \sum_{j = k}^{\infty} \Delta_j \right) \tag{55} \\ &= \frac{1}{N} \sum_{k = 0}^{N} I(k) + \sum_{k = 0}^{N} \sum_{j = k}^{\infty} \frac{\Delta_j}{N}. \tag{56} \end{align} \]
- 只需要满足 \(\Delta_{\infty}=0\),那么就一致【(56) 的右边式子表示 bias,\(N\to\infty\) 的时候,趋向于 0】