(论文)[2024-SIGA] siggraph-asia 论文简介
siggraph-asia-2024
(Don't) Make Some Noise: Denoising
【C】A Statistical Approach to Monte Carlo Denoising
- 统计学降噪方法,kernel-based,考虑到传统的交叉双边滤波等方法对 GBuffer 中不存在的信息(阴影、焦散等)考虑较少,对其加上一个二值权重
- 对于两个像素,通过最小化两个像素之间的 MSE,得到一个最优权重
- 但是由于噪声的存在,最优权重不准,于是将其做一个二值化,而这种二值化恰好又等价于 Welch’s t-test
- 下面式子:估计像素 \(j\) 权重,\(\rho\) 表示交叉双边滤波,\(m\) 表示二值权重
\[ w_{ij}=\dfrac{\rho_{ij}{\color{ red}m_{ij}}}{\sum_{i}\rho_{ij}{\color{ red}m_{ij}}} \]
【C】Filtering-Based Reconstruction for Gradient-Domain Rendering
- LING-QI YAN
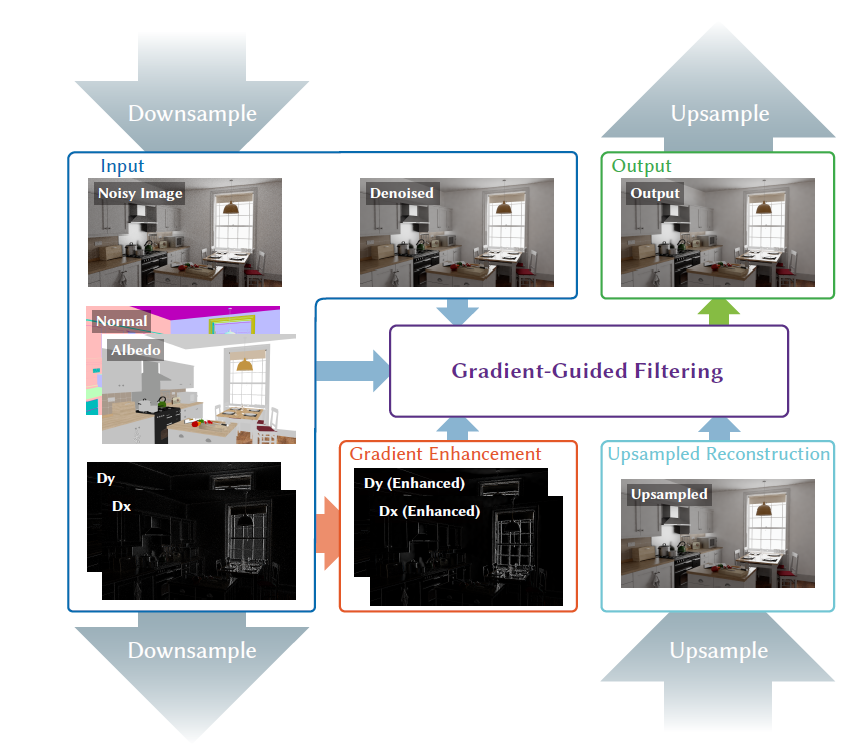
- 简单来说就是降噪中,加入梯度信息作为指导
- 将梯度域渲染建模成 Kernel-Based 的方法
- 整体架构是一个金字塔架构,上下采样的权重通过 GLU【SIG-2023】的方式计算得到
- 在每一层内,进行梯度增强、Filtering 两个操作
- 梯度增强权重通过原始梯度图指导、GBuffer 监督得到
- 保留梯度较大、较小的值(sharp、smooth)
- GBuffer 变化小的地方梯度也要小
- Filtering
的权重通过增强后的梯度、GBuffer、降噪后的图片、上采样的结果监督【优化权重系数
\(w\)】
- MSE 小【整个流程,梯度只体现在这里的计算 \(\mu\) 真值?】
- \(w\) 用于重建 GBuffer 也要好
- \(w\) 重建上采样的图片应该和其本身差不多
- \(w\) 重建后的图片更加接近降噪后的图片
- 梯度增强权重通过原始梯度图指导、GBuffer 监督得到
- 实验显示比之前的梯度域渲染好(收敛性好、同 spp 好),比降噪方法好(同时间好)
- 非学习方法;渐近无偏
【C】Spatiotemporal Bilateral Gradient Filtering for Inverse Rendering
- TZU-MAO LI,code
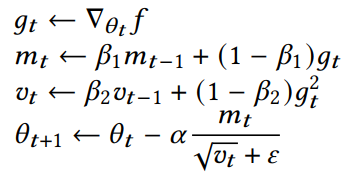
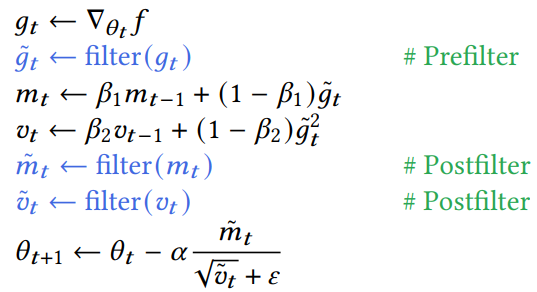
- Adam 中,对输入的梯度进行降噪,对 EMA 更新的 moment 也进行降噪
- 可微渲染中,梯度存在噪声,导致收敛慢
- Adam 可以做时间平滑【对噪声梯度降噪;per-component 调整 lr】
- 如果待优化的东西,各向异性很严重,则效果不好
- inverse Laplacian operator 可以做空间平滑(over smooth)【目前基本都是各向同性】
- 论文提出 edge-aware spatiotemporal optimizer,让效果更好【基于 cross-bilateral filter】
- Adam 可以做时间平滑【对噪声梯度降噪;per-component 调整 lr】
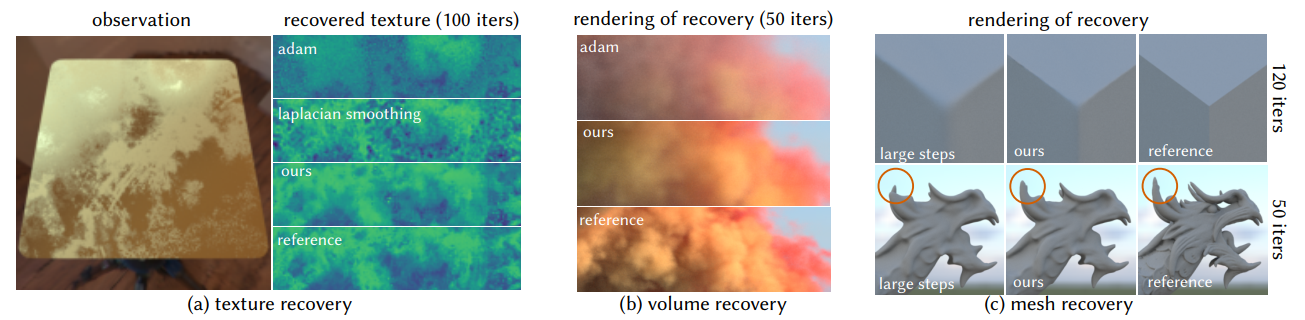
- 应用:可微纹理、体数据、几何
- 不需要训练
- 之前对梯度降噪的工作:和 PT 一样设计高效的 estimator
- 论文设计优化器
细节
- 优化问题:\(f:\mathbb{R}^{n}\to\mathbb{R}\),求 \(\arg\min f(\theta)\)
- 梯度下降:\(\theta_{t+1}=\theta_t-\alpha\nabla_{\theta}f_t\)
- CG 中的问题
- 梯度很难算,一般是一个带噪声的估计
- 负梯度方向不一定是最好的优化方向
- quadratic:\(-H^{-1}\nabla_{\theta}f\)(一步优化)
- anisotropic:\(-P^{-1}\nabla_{\theta}f\)(precondition,\(P^{-1}\) 正定)
- Adam:temporal filtering,diagonal precondition(不考虑 \(\theta\) 各组件相关性)
- 相关性:the pixels in an image, texels in a texture, voxels in a volume, and vertices in a mesh
- Anisotropic spatiotemporal filtering
- 不限定具体 filter,分析使用交叉双边滤波【下面是连续形式】
- \(w_d\):data term,保留边界
- \(\theta\):我们不是用参数的梯度值,而是使用参数本身【噪声更小,低动态范围,关键】
- non-diagonal preconditioning
- 矩阵形式:\(D^{-1}K\nabla_{\theta}f\)
- \(K\) 考虑 \(w_s,w_d\)(对称正定仿射),建模相关性
- \(D\):归一化(对角)
- 矩阵形式:\(D^{-1}K\nabla_{\theta}f\)
\[ \tilde{h}(x)=\frac{1}{z(x)}\int_{\Omega}h(y)w_{s}(x,y)w_{d}(\theta(y),\theta(x))\,\mathrm{d}y \]
- 好处:Noise removal、Non-diagonal preconditioning、Piecewise smoothness prior(分段常数)
- Laplacian smoothing 是各向同性的特例
应用实现
- Mitsuba 3
- Grid-based applications
- 实现:A-trous cross-bilateral filter(多个小的代替大的,加速)
- texture/volume 只使用 postfiltering(收敛快)
- Inverse texture recovery
- a single view
- 16spp forward,1spp gradient
- texture:512x512
- Inverse volume recovery
- 64 views
- volume:64x64x64
- 效果:高 spp 梯度下,收敛快;低 spp 梯度下,恢复效果好
- Inverse rendering of meshes
- 没看,好复杂
- 涉及到重参数化,data term 是三角形的法向
Limits
- 我们假设参数是分段常数的
- 超参数需要人为找
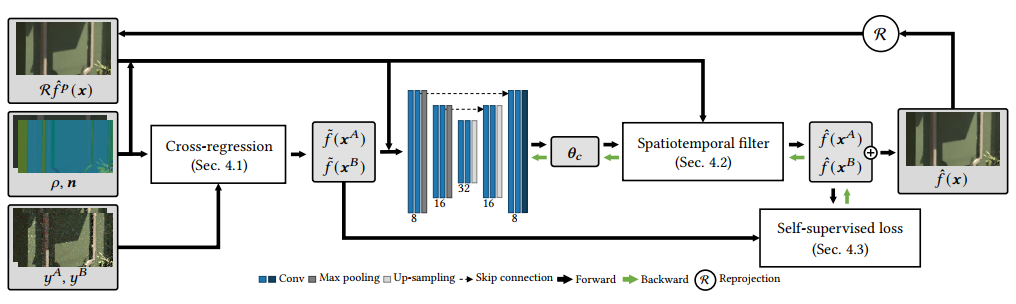
【J】Online Neural Denoising with Cross-Regression for Interactive Rendering
- Gwangju Institute of Science and Technology, South Korea
- 做一些 non-geometric edges (阴影等)
- 在线学习(不需要真值监督),适合交互式渲染,时序稳定
- 方法:hybrid(classical + neural)
- Local regression:观测 \((x_i,y_i),y_i=f(x_i)+\epsilon_i\)(\(\mathbb{E}[\epsilon]=0\)),估计 \(f\)
- 一阶展开:\(f(x_i)\approx f(x_c)+\nabla
f(x_c)^{T}(x_i-x_c)\),\(x_c\in\Omega_c\)(denoising window)
- \(x_i,x_c\):explanatory
variables
- \(x_i,x_c\):explanatory
variables
- 未知的 \(f(x_c),\nabla f(x_c)\)
可以使用带权重的最小二乘估计
- weighted MSE 最小
- 求出来之后,根据归一化的权重计算 \(f(x_i)\)
- 一阶展开:\(f(x_i)\approx f(x_c)+\nabla
f(x_c)^{T}(x_i-x_c)\),\(x_c\in\Omega_c\)(denoising window)
- 论文:选择 1/16 像素求解【block-wise】
- 问题:降噪的好坏依赖于 \(x_i,f(x_i)\) 之间的线性程度(是线性假设)
- 之前:使用 G-buffers 作为 explanatory variables,不能保留 non-geometric edges
- 不能获取很准确的 per-pixel MSE(样本数太少)
论文策略
- pt 样本划分:\(y_a,y_b\)(无偏带噪)
- 分别进行 local regression,得到 \(\tilde{f}(x^{A}),\tilde{f}(x^{B})\),下面 A 为例子
- GBuffer:texture \(\rho\),normal \(n\)
- 不一样的点:cross-regression
- explanatory varables:\(x_i^A-x_c^A=\left[\dfrac{y_i^A-y_c^A}{\hat{\sigma}_i^A+\hat{\sigma}_i^C+\epsilon},\rho_i-\rho_c,n_i-n_c\right]^T\)
- \(\hat{\sigma}_i^A\):3x3 windows 内均值和像素颜色的 square distance
- explanatory varables:\(x_i^A-x_c^A=\left[\dfrac{y_i^A-y_c^A}{\hat{\sigma}_i^A+\hat{\sigma}_i^C+\epsilon},\rho_i-\rho_c,n_i-n_c\right]^T\)
- \(w_{c,i}^A=\exp\left(-\dfrac{\|y_i^A-y_c^A\|^2}{(\hat{\sigma}_i^A)^2+(\hat{\sigma}_i^C)^2+\epsilon}\right)\)
- cross 体现:block-wise regression,使用 \(x_i^A-x_c^A,w_i^A,{\color{red}y^B}\) 计算得到 \(\tilde{f}(x^{A}_c)\)
- 然后根据权重计算的到 \(\tilde{f}(x^{A}_i)\),也就是 \(\tilde{f}(x^{A})\)
- 注意这里 \(\tilde{f}(x^{A})\) 还是和 \(y^A\) 相关的(\(y^B\) 只是用于计算权重)
- 效果还不够好,接着串一个 NN 降噪器
- 输入:\(\tilde{f}(x^{A})\)、\(\tilde{f}(x^{B})\)、GBuffer \(\rho,n\)、上一帧重投影结果 \(\mathcal{R}\hat{f}^p(x)\)
- 输出:\(\theta_{c}=[\theta_{c}^{A},\theta_{c}^{B},\theta_{c}^{\rho},\theta_{c}^{n},\theta_{c}^{p},\theta_{c}^{\alpha}]\)
- \(\theta_{c}^{\alpha}\) 作为当前结果(\(\theta_{c}^{\alpha}\))和重投影(\(1-\theta_{c}^{\alpha}\))的插值
- 当前结果:\(\tilde{f}(x_i^A)\) 的 cross-bilateral(其他 \(\theta^2\) 作为分母方差)
- 最终结果:\(\tilde{f}(x_i^A),\tilde{f}(x_i^B)\) 根据权重插值
- loss:两部分相同权重
- \(\mathcal{L}_c^s=\dfrac{1}{2}\left(\dfrac{\|\hat{f}(x_c^A)-\tilde{f}(x_c^B)\|^2}{\|\tilde{f}(x_c^B)\|^2+\epsilon}+\cdots\right)\)
- \(\mathcal{L}_c^t=\dfrac{1}{2}\left(\dfrac{\|\hat{f}(x_c^A)-\mathcal{R}\tilde{f}(x_c^B)\|^2}{\|\mathcal{R}\tilde{f}(x_c^B)\|^2+\epsilon}+\cdots\right)\)
- one gradient step per frame
- 过程中:\(y\) 进行 log-transform,最后逆变换
- 时间:~22.26 ms(1080 P,RTX 4090)反传占一半,不算 ReSTIR PT 生成样本(~65 ms)
- limits
- 问题:当存在亮噪点时,会有 correlated outliers (过亮)
- future
- distributed effects:GBuffer 存在噪声 如何处理(pre-filtering)
- GPU 高效实现
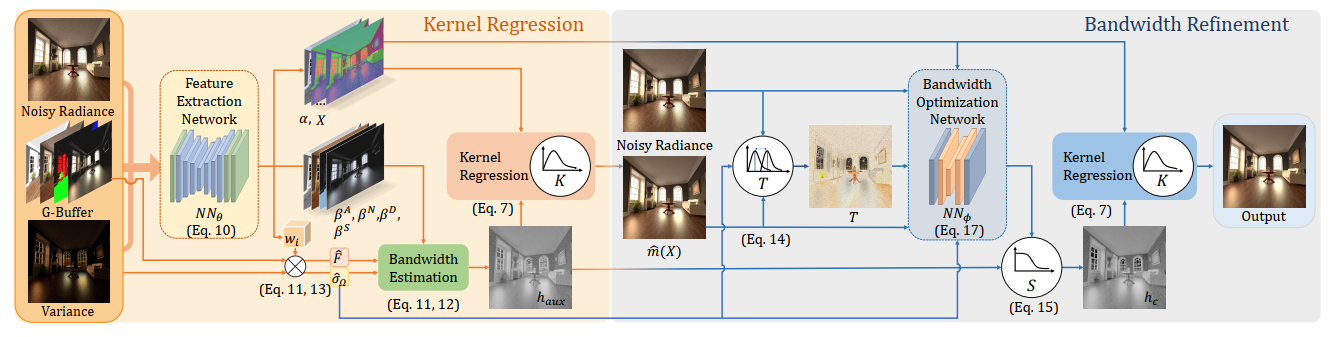
【J】Neural Kernel Regression for Consistent Monte Carlo Denoising
- NN denoiser,高 spp 也能准确(收敛到 GT)
- TODO