(论文)[2022-SIG] Deep Adaptive Sampling and Reconstruction using Analytic Distributions
DASR using Analytic Distributions
- 主页:Disney
Research | Studios, Switzerland
- Farnood Salehi、Marco Manzi、Gerhard Röthlin、Christopher Schroers、Romann Weber、Marios Papas
- 和之前的方法不同
- 之前训练的图片是预渲染的,我们是从解析噪声中采样的(噪声近似像素分布)
- 能够从少量目标分布的样本中高效采样
- spp 增加,我们的解析近似越准
- 另外还有 global summary module,用于获取感受野之外的信息(减缓局部最优问题)
- 端到端训练:AS + Denoiser
- 坚实的理论分析
Introduction
- 理想的 AS 策略需要考虑:增加的样本如何影响 denoised
image
- 目前的 AS+ReCon 算法没有考虑这点【DASR】
- 我们的算法比之前的效果更好:DEP、DASR(使用相同的训练数据集)
- DEP:【2018-SIG】Denoising with Kernel Prediction and Asymmetric Loss Functions
- 使用更少的训练数据,效果比 DASR 更好
- 针对高质量的渲染时,减少 26-37% 的训练数据
- 目标:We designed our method for the specific use case of high quality offline rendering of single frames, where the sampling distribution is refined iteratively during rendering.
Related Work
- 我们的框架能使用任何可微的 denoiser,我们选用 KPCN
- 【SIG-2017】Kernel-predicting convolutional networks for denoising Monte Carlo renderings
- 最接近的两个工作:DEP、DASR
- DEP:先估计降噪后图片的 remaining error,然后根据 error 获得
sampling map
- 假设 error 的降低应该正比于目前的 denoising error(启发式)
- 没有考虑当前像素样本的增加对周围像素的影响
- denoiser 优化了 sampler,但是 denoiser 并没有从 sampler 中获得的分布中优化
- 假设 error 的降低应该正比于目前的 denoising error(启发式)
- DASR
- 需要很多预渲染的训练样本
- 因为磁盘 IO/GPU 显存问题,训练时间也被拉长
- 多 spp 训练,这个问题更严重
- 我们的方法类似 DASR,但是不需要存储大量样本
Methodology
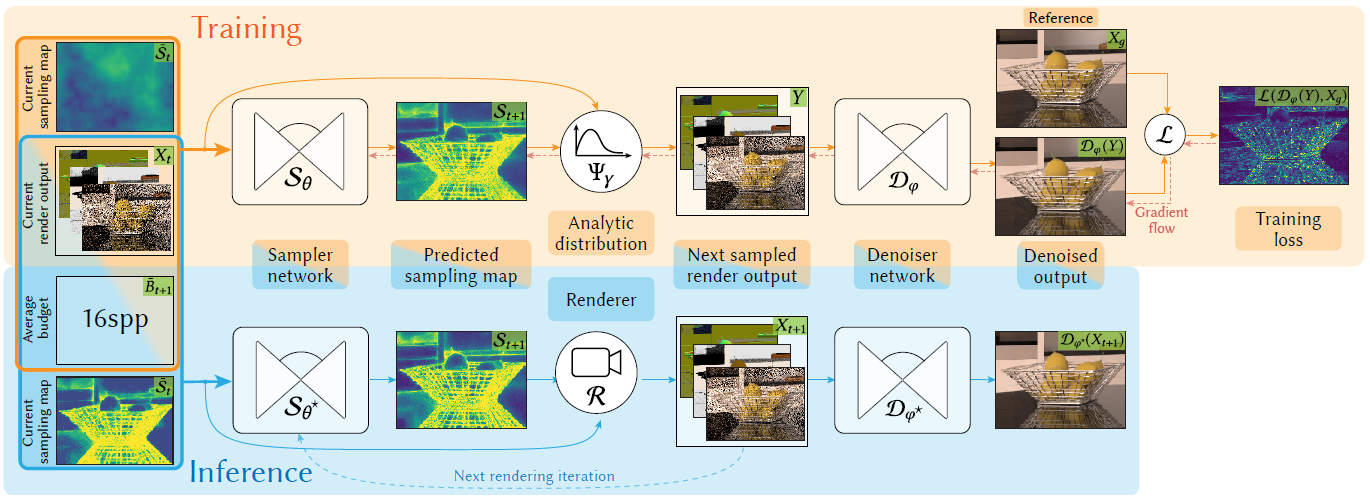
- 迭代渲染:\(t\in[0,T]\)
- 本轮迭代的样本数 \(B_t\)(budget)
- \(B_t=\sum_{p\in P}s_p(t)\)
- sample map \(\mathcal{S}_t=\{s_p(t)\}\)
- 本轮迭代的样本数 \(B_t\)(budget)
- 第一轮迭代:均匀分布
- \(s_p(0)=B_0/|P|,\forall p\in P\)
- 之后的 \(\mathcal{S}_t\) 计算如下
Optimizing the Sampling Map
- 定义最优化目标
\[ \begin{aligned} &\quad\mathcal{S}_{t+1}(X_t, B_{t+1}) = \arg\min_{\mathcal{S}} \mathbb{E}_{Y \sim \mathcal{R}(Y | \mathcal{S}, \bar{ \mathcal{S}}_t, X_t)} \left[ \mathcal{L}(\mathcal{D}(Y), X_g) \right]&\quad(1)\\ \text{subject to}&\quad \sum_{p \in P} s_p = B_{t+1} \text{ and } s_p \geq 0, \forall p \in P&\quad(2) \end{aligned} \]
- \(\mathcal{R}(Y | \mathcal{S}, \bar{
\mathcal{S}}_t, X_t)\):根据 \(\mathcal{S}\) 生成新样本,并将其累加到
\(X_t\) 上之后的渲染结果分布
- \(\bar{ \mathcal{S}}_t=\{\sum_{j=0}^{t}s_p(t)\}\):累计 sample distribution
- \(\mathcal{L}\):loss
- \(\mathcal{D}\):denoiser
- \(X_g\):GT reference image
- \(Y = \dfrac{\bar{\mathcal{S}}_t X_t + \mathcal{S} \bar{Y}_{\mathcal{S}}}{\bar{\mathcal{S}}_t + \mathcal{S}}\)(element-wise calculation)
- 当前迭代轮 \(t\) 不知道下一轮迭代 \(t+1\) 的样本的值,因此 式子 1 得通过下一轮的期望优化
- DASR 采样式子 1,\(Y\)
通过预渲染的图片组装
- 需要保存所有样本,开销大
Analytic Noise Distribution Synthesis
- 前提
- 知道每一个像素的 GT mean、variance
- renderer is using i.i.d. samples
- 将(both) rendered and analytic distributions 建模为样本数的函数
- 这样能够就能生成任意多的样本
- 先分析 \(\mathbb{E}_{Y \sim \mathcal{R}(Y | \mathcal{S}, \bar{ \mathcal{S}}_t, X_t)} \left[ \mathcal{L}(\mathcal{D}(Y), X_g) \right]\) 的特征
- \(X_t=[I_t,F_t]\):noisy data(color、features)
引理1
- 其中 \(\Psi\) 是任意和 \(\mathcal{R}\) 期望、方差相同的分布
\[ \begin{array}{l} \mathbb{E}_{\Psi\left(Y\mid\mathcal{S},\bar{\mathcal{S}}_{t}, X_{t}\right)}[Y]=\mathbb{E}_{\mathcal{R}\left(Y\mid\mathcal{S},\bar{\mathcal{S}}_{t}, X_{t}\right)}[Y],\\ \mathbb{V}_{\Psi\left(Y\mid\mathcal{S},\bar{\mathcal{S}}_{t}, X_{t}\right)}[Y]=\mathbb{V}_{\mathcal{R}\left(Y\mid\mathcal{S},\bar{\mathcal{S}}_{t}, X_{t}\right)}[Y]. \end{array} \]
- 推导见论文,简单的理解如下
- \(\text{MSE}=\text{Var}+\text{Bias}^2\),然后发现最终的结果只和 \(\mathcal{R}\) 的 var、mean 有关,和 \(\mathcal{R}\) 本身无关
- MRSE 可以写作 MSE 的表达式,剩余都是常量,因此也 OK
- 引理1只是说,denoise kernel 不能依赖于 \(t+1\) 的某个具体的数据
- 可以依赖于 \(t\) 和 \(t\) 之前已有的数据
- 可以依赖于之后数据的一些统计信息
- 在引理1的加持下,我们可以将 rendered samples 替换成任意的 mean、var 相同的解析分布 \(\Psi\left(Y\mid\mathcal{S},\bar{\mathcal{S}}_{t}, X_{t}\right)\)
- 计算 future rendered mean、var
- \(\hat{\mathbb{V}}[X_t]\):numerical estimate of the variance of the current data
- \(\mathbb{V}_{X_g}\):reference sample variance【把样本数乘掉了,所以少了一个 \(\mathcal{S}\)】
\[ \mathbb{E}_{\mathcal{R}}(Y \mid \mathcal{S}, \bar{\mathcal{S}}_t, X_t)[Y] = \frac{\bar{\mathcal{S}}_t X_t + \mathcal{S} X_g}{\bar{\mathcal{S}}_t + \mathcal{S}} \]
\[ \mathbb{V}_{\mathcal{R}}(Y \mid \mathcal{S}, \bar{\mathcal{S}}_t, X_t)[Y] = \frac{\bar{\mathcal{S}}_t^2 \hat{\mathbb{V}}[X_t] + \mathcal{S} \mathbb{V}_{X_g}}{(\bar{\mathcal{S}}_t + \mathcal{S})^2} \]
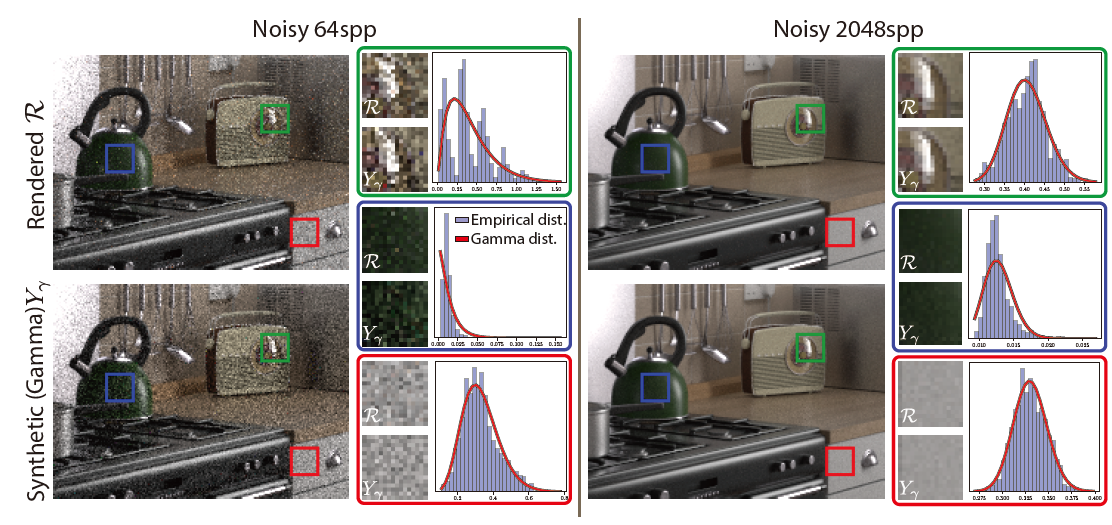
Choice of Distribution
- 前人研究表明,PT 结果,像素值均值的分布近似于 gamma 分布
- 指像素 \(p\) 在第 \(1\sim k\) spp 下能够计算 \(k\) 个均值 ,这 \(k\) 个均值满足 gamma 分布【中心极限定理,满足 Gaussian】
- Learning Patterns in Sample Distributions for Monte Carlo Variance Reduction
- 如下是示意图
- 左右图只是低 spp 和 高 spp 的区别
- 高 spp,gamma 分布近似的更好
- 高 spp,分布更像是正态分布【中心极限定理】
- 看左图
- 上图:每个像素根据前 64 spp 的结果可以计算出一个分布 \(\mathcal{R}\),然后根据 \(\mathcal{R}\) 进行采样 64 spp,得到的结果图
- 下图:每个像素根据前 64 spp 的结果,使用分布 \(Y_{\gamma}\) 去近似这组数据,然后根据 \(Y_{\gamma}\) 进行采样 64 spp,得到的结果图
- 选定了红绿蓝三个区域,将其放大后展示
- 其中直方图对应被选中区域的中心像素,前 64 spp
的直方图【单个像素的直方图】
- 展示其分布,红线表示近似的 gamma 分布
- 其中直方图对应被选中区域的中心像素,前 64 spp
的直方图【单个像素的直方图】
- 左右图只是低 spp 和 高 spp 的区别
- 对角线是真实的 CDF,另外 3 条线是近似情况
- 可以看出 gamma、log-normal 在低 spp 也能不错近似

- gamma 分布的好处
- 期望:\(\alpha\beta\),方差:\(\alpha\beta^2\)
- gamma 分布的可加性
- 相互独立的随机变量 \(X,Y\),如果满足 \(X\sim \Gamma(\alpha_1,\beta);Y\sim \Gamma(\alpha_2,\beta)\),则有 \(X+Y\sim \Gamma(\alpha_1+\alpha_2,\beta)\)
- \(X_i\sim \Gamma(\alpha,\beta)\Rightarrow\sum X_i\sim \Gamma(N\alpha,\dfrac{\beta}{N})\)
- 于是我们可以直接通过采样 ”mean distribution“ 得到均值(1
个样本就够了)
- 不是本身就是 ”mean distribution“ 满足 gamma
分布吗?
- 因为还需要采样若干个样本【例如 sample map 指示 4 个样本】
- 不是本身就是 ”mean distribution“ 满足 gamma
分布吗?
- 采样新样本:\(Y_{\gamma}\sim\text{gamma}(\alpha(\mathcal{S}),\beta(\mathcal{S}))\)
- 和现有样本进行加和
\[ \dfrac{\bar{\mathcal{S}}_t X_t + \mathcal{S} \bar{Y}_{\gamma}(\mathcal{S})}{\bar{\mathcal{S}}_t + \mathcal{S}}\sim\Psi_{\gamma}(Y|\mathcal{S},\bar{\mathcal{S}}_t,X_t) \quad(8) \]
- 上面的式子 (8) 和 rendered data 有相同的 mean 和 var
- 只需要 gamma 分布的均值为 \(X_g\),方差为 \(\mathbb{V}_{X_g}/\mathcal{S}\)【根据方差、期望线性加和】
- 计算 \(\alpha,\beta\)
- \(\odot\) 表示 element-wise 的计算
- 这和论文中差了一个倒数,估计论文中是使用 \(\gamma(\alpha,1\beta)\) 的这种表示方法,一样的
\[ \alpha(\mathcal{S}) = \frac{X_{g}^2 \odot \mathcal{S}}{V_{X_{g}}}, \quad \beta(\mathcal{S}) = \left(\frac{X_{g} \odot \mathcal{S}}{V_{X_{g}}}\right)^{-1} \]
- 此时对于 式子 1,可以使用 \(\Psi_{\gamma}(Y|\mathcal{S},\bar{\mathcal{S}}_t,X_t)\) 代替 \(\mathcal{R}(Y | \mathcal{S}, \bar{ \mathcal{S}}_t, X_t)\),从而更快的生成样本
Jointly Optimizing Sampling and Denoising
- 上面说的方法,认为 \(\mathcal{D}\) 是固定的(fixed pre-trained denoiser)
- 联合优化 \(\mathcal{D},\mathcal{S}\) 能够实现更低的 loss,式子 10
\[ \begin{aligned} &\arg\min_{\theta,\varphi} \sum_{\iota_t \in \mathcal{T}} \mathbb{E}_{Y \sim \Psi_Y \left( Y \mid \mathcal{S}_\theta(\bar{\mathcal{S}}_t, X_t, B_{t+1}), \bar{\mathcal{S}}_t, X_t \right)} \left[ \mathcal{L}(\mathcal{D}_\varphi(Y), X_g) \right]\\ \text{subject to}&\quad \sum_{p \in P} s_p = B_{t+1} \text{ and } s_p \geq 0, \forall p \in P&\quad(10) \end{aligned} \]
- \(\iota_t=(X_t,\bar{\mathcal{S}}_t, X_g, B_{t+1})\)
Implementation
- TensorFlow
Denoiser and Sampler Architectures
denoiser
- two-pass kernel-predicting denoiser with a U-net architecture
- two-pass:specular 和 diffuse 分开
- diffuse 没有做 albedo division
- UNet:5 scale
- convolution bandwidths are 64, 128, 256, 256, 256
- 输入图片:\(I\)(\(I_d/I_s\),diffuse/specular)
- 辅助信息:\(F_a\)(albedo)、\(F_n\)(normal)
- 输入:\(X_t=\left[\log(1+I),\log(1+F_a),F_n\right]^\top\)
- 输出 kernels
sampler
- 架构类似,输入输出不一样
- 输出一个标量:过一个 softmax
\[ \mathcal{S}_\theta(X_t, \bar{S}_t, B_{t+1}) = B_{t+1} \, \text{softmax}(\Phi_\theta(X_t, \bar{\mathcal{S}}_t, \bar{B}_{t+1})) \]
- budget \(B_{t+1}\) 是一个重要的参数,对 sampling map 的影响是非线性的
- 输入
\[ \tilde{X}_t = \begin{bmatrix} \log(1 + I_s) \\ \log(1 + I_d) \\ \log(1 + F_a) \\ F_n \\ \log(1 + \bar{S}_t) \\ \log(1 + \bar{B}_{t+1}) \end{bmatrix} \]
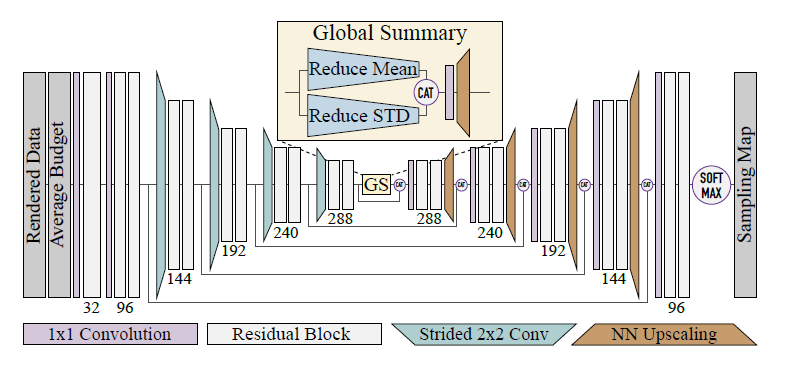
Global Summary Module
- DASR 或者我们的简单实现,sampling maps 中存在 halos(晕),因为感受野太小导致的
- 我们的解决方案:加上 global summary (GS) 模块
- 放在 encoder 和 decoder 之间
- 计算 encoder 的输出的统计量(相当于集成了所有像素的信息)
- 流程
- 对每个通道计算均值、标准差
- concat
- 1x1 conv 减小通道数
- nearest-neighbor upscale 到和 decoder 输出 shape 相同
- 和 decoder 输出 concat
Analytic Noise Distributions
- 需要计算梯度
- 可以通过 implicit re-parameterization 计算,但是非常不稳定
- 同样我们也是用 DASR 的有限差分方式
- 依赖于 \(\mathbb{V}_{X_g}\)
的准确估计(在渲染 GT 的时候高质量计算)
- 最后再过一个 denoiser 去除 remaining noise【因为实际渲染的时候并得不到 GT】
- variance denoiser 和 color denoiser
网络结构相似,也是在我们的训练集上训练,使用 SMAPE metric
- \(\bar{\mathcal{S}}_t\cdot\mathbb{V}(X_t)\):denoised sample variance estimate of \(X_t\)
- \(\mathbb{V}_{X_g}\):GT
- 网络输入:\(\left[\log\left(1+\bar{\mathcal{S}}_{t}\cdot\mathbb{V}(X_{t})\right),\log\left(1+F_{\mathrm{a}}\right),F_{\mathrm{n}}\right]\)
- 采样
- RGB 通常认为是有相关性的,\(Y_{\gamma}\) 的每个通道使用相同的随机数种子进行采样
- \(F_{\text{n}}\) 使用 Gaussian 采样,clamp 到 [-1, 1](gamma 不能生成负值)
- 测试了不同的解析分布
- 发现 trunc.normal < log-normal < gamma(大于表示表现好)
- 尤其在低 spp 下,gamma 表现更好
- 实验性结论:减小噪声分布的方差,可以减小梯度反传的方差,但是会增大
bias
- trade off:将 model variance /= 5
Dataset
- 两个数据集
- DASR:需要 cascaded spp 的图片
- DEP/我们:正常
- denoiser 都使用第二个数据集训练
- 17 base scenes
- 随机修改生成 4000 图
- 程序化生成 sample map 用于训练(不同频率的 Perlin 噪声)
- spatial variation in the sampling map 对于训练非常重要
- DASR 需要 4x 磁盘空间
- 数据增强:对 patch 进行 scale、channel 扰动
- evaluation set
- 24 手工制作的场景
Training
- 2 phases:先训练 denoiser、然后一起训练
- DEP 的 pretrained denoiser 不再训练
- patch size 128x128;mini-batch size 4
Denoiser Training
- color
- five-scale kernel-based denoiser
- 输出 kernel weights
- 5 scale 是指和 2018 那篇上采样下采样拼出来一样的吧?
- loss 和 DASR 相同
- L:Laplacian of Gaussian operator(边缘检测),可以认为是一种 perceptual loss
- \(x'=\log(x+1)\):logLoss
- five-scale kernel-based denoiser
\[ \ell({x^{\prime}},{X_{g}}^{\prime})=0.5\left\Vert\frac{x^{\prime}-X_{g}^{\prime}}{X_{g}^{\prime}+\epsilon}\right\Vert_{1}+0.5\left\Vert\frac{L({x^{\prime}})-L(X_{g}^{\prime})}{X_{g}^{\prime}+\epsilon}\right\Vert_{1} \]
- variance denoiser:SMAPE loss
- 训练:
- 2M iters,Adam,lr=2e-5
- fine-tune:250K iters,lr/=10 each phase
联合优化
- 直接优化 式子 10,效果不太好
- 我们的训练是基于合成数据,推理是真实数据
- \(\mathcal{L}\):logLoss
- \(X_t\) 是真实数据【?不是累加的结果吗?】
\[ \begin{aligned} &\arg\min_{\theta,\varphi} \sum_{\iota_t \in \mathcal{T}} \mathbb{E}_{Y \sim \Psi_Y \left( Y \mid \mathcal{S}_\theta(\bar{\mathcal{S}}_t, X_t, B_{t+1}), \bar{\mathcal{S}}_t, X_t \right)} \left[ \mathcal{L}(\mathcal{D}_\varphi(Y), X_g) {\color{red}+\mathcal{L}(\mathcal{D}_\varphi(X_t), X_g)} \right]\\ \text{subject to}&\quad \sum_{p \in P} s_p = B_{t+1} \text{ and } s_p \geq 0, \forall p \in P&\quad(10) \end{aligned} \]
- fine-tune 阶段:每次迭代同时更新 sample map estimator 和
denoiser(DASR 交替更新)
- 效果不会变差,反而可以减少网络收敛的训练轮次