(论文)[2011-SIG] Adaptive sampling and reconstruction using greedy error minimization
GEM-AS
- Adaptive sampling and reconstruction using greedy error minimization
- 作者:Fabrice Rousselle、Claude Knaus、Matthias Zwicker
- University of Bern
- 任务:Adaptive Sampling + Construction
Introduction
- 问题形式化描述
- given a certain budget of Monte Carlo samples, obtain an image that minimizes the relative mean squared error (MSE) by distributing samples in a suitable fashion in the image plane and by filtering the image with appropriate filters.
- 在样本分布空间 + filter 空间的优化问题
- filters 预定义,但是每个像素可以不一样
- 不同尺度的 Gaussians
- 贪心算法:2 steps 的迭代法
- 样本分布确定,从离散的 filters 中找到最小化 MSE 的一个
- 在确定 filters 的情况下,找到更好的样本分布
- 不保证无偏性
- 与 MCPT 的各种优化正交
- 贡献
- 提供了 AS+Recon 的框架
- 提供了框架的一种实现
- 从噪声中获取统计量
Previous Work
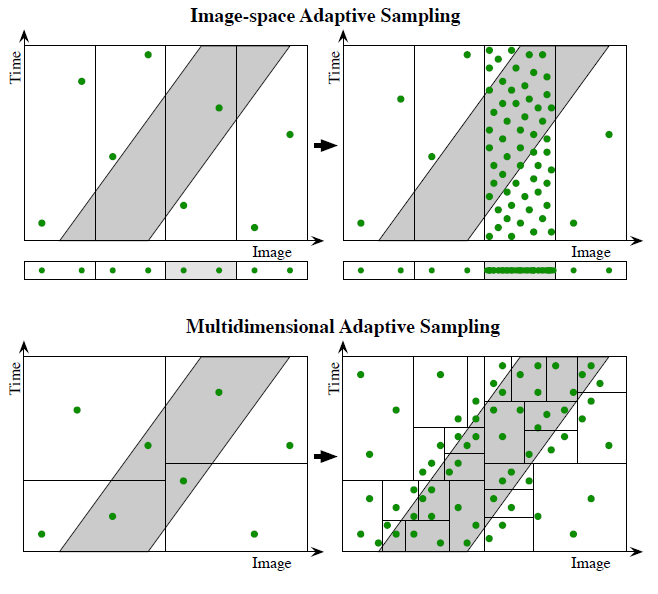
- Image Space Adaptive Sampling and Reconstruction
- 先驱:【1987-SIGC】Generating antialiased images at low sampling densities
- 【2003】Bala:显式表示边,实现 interactive rendering
- 【1998】Bolin and Meyer:通过 Haar wavelets,提出了基于感知的误差
- sota【2009】Overbeck:Adaptive wavelet rendering
(AWR)
- 和我们思想相似,但是局限于小波【ToBeRead】
- 启发式找到样本分布
- Multidimensional Adaptive Sampling and Reconstruction
- 【2008】Hachisuka:直接在高维空间中做 AS【curse of dimension】
- 这里的高维空间似乎指的是 distributed effects
- 【2008】Hachisuka:直接在高维空间中做 AS【curse of dimension】
- Adaptive Filtering
- 不管 AS,直接重建(类似现在的降噪工作等),会导致焦散等信息缺失
- 【2009】Ritschel:cross bilateral filtering
- 【2010】Dammertz:an edge-avoiding a-trous wavelet transform
- 【2011】Shieley:使用 depth buffer
- Image Denoising
- 【1994】Wavelet shrinkage:通过小波变化去除噪声(噪声是 small coefficient)
- 假设一种噪声模型,然后对其降噪
Algorithm Overview
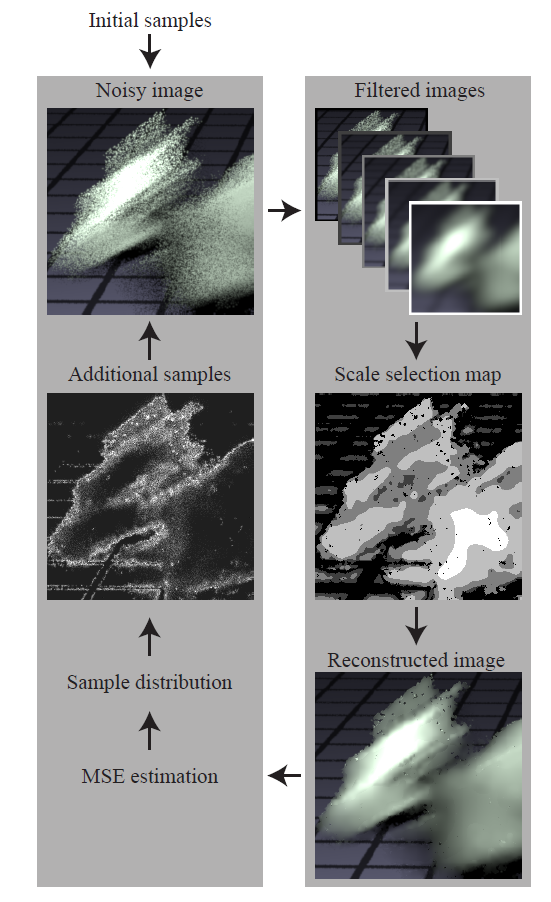
Filter Selection
Incremental MSE Minimization
- 这一小节表示我们不需要 GT 信息
\[ \text{MSE}[c]=\text{Bias}[c]^2+\text{Var}[c] \]
\[ \begin{array}{l} \text{MSE}[c]=\mathbb{E}\left[\left(c-\bar{c}\right)^2\right]\\ \text{Bias}[c]^2=\left(\mathbb{E}\left[c\right]-\bar{c}\right)^2\\ \text{Var}[c]=\mathbb{E}\left[\left(c-\mathbb{E}(c\right)^2\right]\\ \end{array} \]
- 直接估计 filter 的 bias 很难(需要 GT 信息),而 variance 相对简单(不需要 GT 信息)
- 考虑我们的 filters 可以通过 uniform scale 相关联
- 排序:fine to coarse(sharp to smooth)
- key observation
- 随着 filter(fine \(\to\) coarse),bias 单增,variance 单减(单调性假设)
- 定义变换:\(\Delta\) 表示,在计算
bias 的时候与不需要真值
- scale selector \(\mathcal{S}\)
\[ \begin{array}{rl} \mathcal{S}=\Delta{\text{MSE}}\left[f\to c\right]&=\text{MSE}\left[c\right]-\text{MSE}\left[f\right]\\ &=\text{Bias}\left[c\right]^2-\text{Bias}\left[f\right]^2+\text{Var}\left[c\right]-\text{Var}\left[f\right]\\ \end{array} \]
- 选取最好的 filter
- five scales of Gaussian filters at dyadic in tervals
- 根据单调性:\(\mathcal{S}\) 一旦为正,最优的就是当前的 \(f\),否则继续
- 我们使用 Bias、Var 的真值进行验证,我们的假设对于 99.7% 的像素成立
Quadratic Approximation
- 假设 GT 是 filter 内像素的二次函数,filter
的一阶中心距为 0,于是有
- \(r_c,r_f\) 表示 coarse、fine 的 filter 的 scale
- 直观理解:filter scale 2x,Bias 变成 4x【具体为啥不太懂】
\[ \text{Bias}[c]=\dfrac{r_c^2}{r_f^2}\text{Bias}[f] \]
- 连立上式和 \(\text{Bias}[c]=c-\xi,\text{Bias}[f]=f-\xi\)
\[ \text{Bias}[c]^2-\text{Bias}[f]^2=\dfrac{r_c^2+r_f^2}{r_c^2-r_f^2}(f-c)^2 \]
- \(\mathcal{S}\) 的第一项解决
- 我们的二次函数假设对于 82.8% 的像素成立
- 真值验证:从所有候选 filters 中选取最优的(exhausted)
- 对比了 incremental 方法和我们方法和 exhausted 方法的一致程度
- incremental 更好(不知道这是啥,论文也没写)
Estimation from Noisy Data
- \(f,\text{Var}[f]\) 都未知,需要估计
- 样本 \(s_i\)
\[ f=\sum_{i\in\{1\ldots s\}}w_i^f\,s_i \]
\[ \text{Var}\left[f\right]=\sum_{i\in\{1\ldots k\}}\left(w_{i}^{f}\right)^{2}\text{Var}\left[s_{i}\right] \]
- 每一个样本的方差估计如下,对像素内的样本计算
\[ \text{Var}\left[s_{i}\right]\approx\frac{1}{\left|P\right|-1}\sum_{j\in\{P\}}\left(s_{j}-\bar{s}\right)^{2} \]
- \(\mathcal{S}\) 的第二项解决
实验
- 分析如果样本满足一定假设 \(\mathcal{S}\) 的行为
- 很难,如下做数值分析
- 实验
- 样本 \(s_i\):value zero and additive noise
- fine 是 coarse 的 2x
- 输入:\(P\)、fine 的半径 \(r\)、样本 \(s_i\) 噪声的方差
- 理想决策:coarse(因为 bias=0)
- error rate:\(\mathcal{S}\) 犯错的比例
- 实验目的:理解 \(\mathcal{S}\) 随着输入的变化,从而找到一个好的参数
- bias term 和 variance term 是独立的,于是可以分别计算【所有样本都是独立的,使用不同样本就是独立的】
- error rate 实验结果
- Sample Variance
- error rate 和噪声的方差无关:都是成正比(好的不会变差)
- Filter Radius
- 弱相关,large scale 较低
- \(P\):少了不行,多了差不多
- bias \(\propto 1/P\)
- Sample Variance
- 参数选择:bias term 加上权重 \(\rho\cdot
z(\gamma)\)
- \(\rho=1-1/\vert{P}\vert\):修正 low sample counts
- \(z(\gamma)=-\log(1-(1.9\gamma)^{1/\sqrt{2}}),0<\gamma<0.4\)
- \(\gamma\) 表示 error rate,用户指定(Bias 和 Var 之间的 trade off)
Post-Processing the Filter Selection
- non-zero error rate 都会导致 wrong filter selection
decisions,在最终结果图上展现出 spikes 的 artifacts
- 效果就是更平滑
- 实验场景:1D、250 pixels、8 Gaussian filters(\(\sqrt{2}\) x)、输入为两个方形信号(uniform noise)
- 相当于给 filter size 做一个降噪
- 举例:如果一个像素周围都选第一个 filter,只有这个像素选择第 8 个,则认为选择有问题
- outlier:孤立出现
- 我们处理方式:Gaussian filter(coarse size)之后四舍五入
- 论文中说或许可以进一步研究
- 实际 2D 例子如下
- binary stop from scale 2 to 3:白色表示选择 2,黑色表示需要进一步 coarse
Sample Distribution
- 选中 m 个像素,使得 relMSE 能够降低的最多(每个像素分配 n 条光线)
- 先估计 MSE,relMSE 使用 \(\dfrac{\text{MSE}}{\epsilon+\text{ref}^2}\)
- \(\epsilon=0.001\):prevent overemphasizing very dark image areas
- relMSE 反比于样本个数
- \(n_s\) 个样本,再来 \(n\) 个样本,relMSE 降低了:relMSE\(\times \dfrac{n}{n+n_s}\)
- 算法步骤
- 维护一个优先队列,每次选出能够让 relMSE 降低最多的 m 个像素
- 假设 filter 是没有 overlap 的,但是并不强求(相当于一个启发式)
- 对每个像素,在他的 support 中根据 filter 的权重重要性采样 n 个点,每个点采样一条光线
- 维护一个优先队列,每次选出能够让 relMSE 降低最多的 m 个像素
- 为了计算降低的 relMSE,每个像素需要维护一个数(样本的个数)
Implementation
- Computation of Scales and Their Statistics
- 计算 Var 的时候,不可能保存所有样本,因此每个像素保存 finest filter scale、样本方差的均值(每次迭代更新)
\[ \text{Var}\left[p\right]\approx\frac{1}{\left|P\right|}\frac{1}{\left|P\right|-1}\sum_{j\in\{P\}}\left(s_{j}-\bar{s}\right)^{2} \]
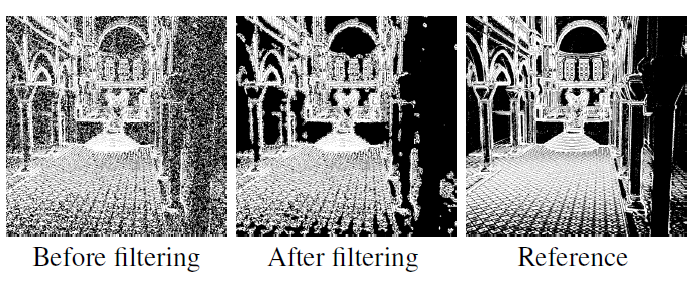
- Filtering Non-Uniform Sample Distributions
- 我们的 sample density map 在 edge 的地方变化大,可能会得导致大的 bias
- 参考【1987-SIG】Generating antialiased images at low sampling densities
- 使用 subpixel grid【4x4】,subpixel 的值使用 subpixel box filter
得到,内部均匀采样
- 相当于分层采样了,省的边缘 density map 变化大
- Final Reconstruction
- 最后一次迭代,filter selection 有一些区别
- 使用 8 Gaussian(\(\sqrt{2}\)x),finest 标准差 1.0,这样可以让最终的选择的 scale 更平滑
- binary stopping map,使用更大的 Gaussian,2x coarse【smoother】
- 只有在需要继续 coarse 的时候,才使用 filtered binary map(能停就停了,除 spike 效果更好)
- 最后一次迭代,filter selection 有一些区别
- 在 PBRT 中实现
- initialization state:4 spp uniform
- adaptive state:8 次迭代,用户指定需要渲染 \(n\) spp
- 每次迭代分配样本:\(N=M(n-4)/8\),\(M\) 表示像素个数
- 每次选择分配给 \(m\) 个像素 \(n\) 个样本,\(m=N/n\)
Result
- \(\gamma=0.1\)
- dual 4-cores XEON system at 2.50GHz, with 8GB of RAM
- \(\gamma\)
- 小:smooth + blur edge
- 大:keep edge + outlier
- 0.2-0.3 之间,MSE 变化都不大(平衡)
- relMSE:\(\epsilon=0.01\)
- Discussion and Limitations
- 如果 PT 很难找到特殊光路,则会低估方差
- 渲染器出来的结果并不是完全随机的,因此会高估方差
- 边界处理不是很好(我们用的各向同性的高斯 filter)