(论文)[2022-SIGC] Denoising-Aware Adaptive Sampling for Monte Carlo Ray Tracing
Denoising-Aware Adaptive Sampling
- Denoising-Aware Adaptive Sampling for Monte Carlo Ray Tracing
- 作者:Arthur Firmino、Jeppe Revall
Frisvad、Henrik Wann Jensen
- 1、2:Technical University of Denmark
- 1、3:Luxion
- 我们的方法
- 可以进一步提高 deep-learning based denoising 的效果
- 不需要额外的网络或者学习
- 最大的贡献:当网络的输入是随机变量的时候,能够估计网络输出的方差
- 使用估计的方差迭代的生成样本
Introduction
- 就算硬件加持,MCPT 还是很难实时
- image denoise
- 早期:通过 auxiliary features, sample statistics, and error estimates 优化参数
- 后期:NN,大部分基于 CNN
- sample variance 在屏幕空间不是均匀的 => Adaptive Sampling
- 早期:AS+Denoise,利用 Denoise 后的方差/误差指导 AS
- 后期:Sampling Map Estimator Net + Denoise Net
- 问题:AS
更像是网络学习出来的得以函数,而和最终图像的方差关系不大
- Sample Map 生成喝 Denoised Image 的关系不大(输入中没有这个)
- 问题:AS
更像是网络学习出来的得以函数,而和最终图像的方差关系不大
- 我们:NN + variance estimate(bridge the gap)
- 基于 denoiser 的一阶泰勒展开
- 通过前向自动微分、Jacobian 计算
- 在渐近渲染的过程中,会时常考虑 denoised image 的结果
- tonemapped version 也 ok(也可以作为一部份)
Related Work
Monte Carlo Denoising
- 早期:a variety of non-linear filters
- 后来:考虑辅助信息(surface normals, albedo, pixel variance, estimates of reconstructed error)
- NN:各种各样
- prediction of filter parameters
- entire filter kernels
- direct prediction of radiance values and coupling denoising with
supersampling
- denoise + super sampling
- 针对低 spp
- 高 spp 无偏研究,post-correction techniques
- combining multiple denoised images
- training a network on error estimates to infer blending parameters between rendered and denoised images
- James-Stein theory, using a network to help estimate the variance of the unbiased input
Adaptive Sampling
- 更类似后验的方法,根据 denoised image 的性质反馈 AS【之前的 SURE12】
- 我们将其迁移到网络上
- 低 spp
Statistical Estimates for Denoised Images
- 主要是 variance and error
Double-Buffer
- 独立渲染两张图 \(\mathbf{x}_a,\mathbf{x}_b\)
- Double-Buffer Variance Estimate
- 展开就推出来了
\[ \text{Var}\left[f_i(\mathbf{x})\right] = \frac{1}{2} \mathbb{E} \left[ \left( f_i(\mathbf{x}_a) - f_i(\mathbf{x}_b) \right)^2 \right] \]
- Double-Buffer Error Estimate
- \(\hat{\sigma}_{a,i}^2,\hat{\sigma}_{b,i}^2\) 表示方差的无偏估计
\[ \mathbb{E}\left[(f_i(\mathbf{x}) - \mu_i)^2\right]=\mathbb{E}\left[\frac{1}{2}\left((f_i(\mathbf{x}_a) - \mathbf{x}_{b,i})^2 - \hat{\sigma}_{b,i}^2 + (f_i(\mathbf{x}_b) - \mathbf{x}_{a,i})^2 - \hat{\sigma}_{a,i}^2\right)\right] \]
- 证明:PT 出图 \(x_a,x_b\),降噪结果 \(f(x)\),真值 \(\mu\),方差 \(\sigma\)
\[ \begin{aligned} \mathbb{E}[(f(x_a)-\mu)^2] &=\mathbb{E}[(f(x_a)-x_b+x_b-\mu)^2]\\ &=\mathbb{E}[(f(x_a)-x_b)^2]+\mathbb{E}[(x_b-\mu)^2]+2\mathbb{E}[(f(x_a)-x_b)(x_b-\mu)]\\ &=\mathbb{E}[(f(x_a)-x_b)^2]+\sigma^2+2\mathbb{E}[(f(x_a)-\mu+\mu-x_b)(x_b-\mu)]\\ &=\mathbb{E}[(f(x_a)-x_b)^2]+\sigma^2+2\mathbb{E}[(f(x_a)-\mu)(x_b-\mu)]-2\mathbb{E}[(x_b-\mu)^2]\\ &=\mathbb{E}[(f(x_a)-x_b)^2]-\sigma^2+2\mathbb{E}[(f(x_a)-\mu)(x_b-\mu)]\\ &=\mathbb{E}[(f(x_a)-x_b)^2]-\sigma^2+2\mathbb{E}[f(x_a)(x_b-\mu)]-2\mu\mathbb{E}[(x_b-\mu)]\\ &=\mathbb{E}[(f(x_a)-x_b)^2]-\sigma^2+2\mathbb{E}[f(x_a)]\mathbb{E}[(x_b-\mu)]-0\\ &=\mathbb{E}[(f(x_a)-x_b)^2]-\sigma^2+2\mu\cdot0\\ &=\mathbb{E}[(f(x_a)-x_b)^2]-\sigma^2\\ \end{aligned} \]
- 上面两种方式都没有用到降噪后的结果:\(f\left(\frac{1}{2}(\mathbf{x}_a + \mathbf{x}_b)\right)\)
SURE
- \(\mathrm{x}\) 是正态分布
- estimated covariance matrix of \(\mathrm{x}\)
\[ \mathbb{E}\left[(f_i(\mathbf{x}) - \mu_i)^2\right] = \mathbb{E}\left[(f_i(\mathbf{x}) - \mathbf{x}_i)^2 + 2(\mathbf{J}_f(\mathbf{x}) \hat{\Sigma})_{i,i} - \hat{\sigma}_i^2\right] \]
Denoising-aware AS
- 估计 NN 的 variance
Deep NN Variance Estimate
- 目的:不使用 double buffer、降低 variance 估计的噪声
- 函数:\(f_i:\mathbb{R}^N\to\mathbb{R}\)
- 输入是独立的随机变量 \(X_1,\cdots,X_N\),各自的方差为 \(\text{Var}\left[X_j\right]=\sigma_j^2\)
- 则输出方差的一阶估计如下
- 根据 \(\text{Var}[f(x)]=\text{Var}[\Delta f(x)]\),泰勒展开即证
\[ \text{Var}[f_i(X_1, ..., X_N)] \approx \sum_{j=1}^{N} \left|\frac{\partial f_i}{\partial x_j}\right|^2 \sigma_j^2. \]
- 微分和 JVP(Jacobian-vector product)同义
- NN 函数 \(f:\mathbb{R}^N\to\mathbb{R}^M\)
- \(\mathbf{v}\in\mathbb{R}^N\) 在
\(\mathbf{x}\in\mathbb{R}^N\) 处的 JVP
为 \(\mathbf{J}_f(\mathbf{x}) \mathbf{v} \in
\mathbb{R}^M\)
- \(\mathbf{J}_f(\mathbf{x}) \in \mathbb{R}^{M\times N}\)
- \(\mathbf{J}_f(\mathbf{x})_{i,j}=\dfrac{\partial f_i}{\partial x_j}(\mathrm{x})\)
- \(\mathbf{v}\in\mathbb{R}^N\) 在
\(\mathbf{x}\in\mathbb{R}^N\) 处的 JVP
为 \(\mathbf{J}_f(\mathbf{x}) \mathbf{v} \in
\mathbb{R}^M\)
- 我们取 \(\mathbf{v}\) 如下:\(v_j = \{+\sqrt{\hat{\sigma}_j^2},
-\sqrt{\hat{\sigma}_j^2}\}\),均匀采样
- 其中:\(\hat{\sigma}_j^2\) 是 \(\sigma_j^2\) 的无偏估计
- 于是有
- \(\mathbb{E}\left[v_j\right]=0\)
- \(\mathbb{E}\left[v_jv_k\right]=\mathbb{E}\left[v_j\right]\mathbb{E}\left[v_k\right]=0,j\ne k\)
\[ \begin{align*} \mathbb{E}\left[\left(\left(\mathbf{J}_f(\mathbf{x})\mathbf{v}\right)_i\right)^2\right] &= \mathbb{E}\left[\left(\sum_{j=1}^{N} \frac{\partial f_i}{\partial x_j}(\mathbf{x}) v_j\right)^2\right] \\ &= \mathbb{E}\left[\sum_{j=1}^{N} \left|\frac{\partial f_i}{\partial x_j}(\mathbf{x})\right|^2 v_j^2 + 2\sum_{j=1}^{N} \sum_{k=1}^{j-1} \left(\frac{\partial f_i}{\partial x_j}(\mathbf{x}) \frac{\partial f_i}{\partial x_k}(\mathbf{x})\right) v_j v_k \right] \\ &= \sum_{j=1}^{N} \left|\frac{\partial f_i}{\partial x_j}(\mathbf{x})\right|^2 \mathbb{E}[v_j^2] + 2\sum_{j=1}^{N} \sum_{k=1}^{j-1} \left(\frac{\partial f_i}{\partial x_j}(\mathbf{x}) \frac{\partial f_i}{\partial x_k}(\mathbf{x})\right) \mathbb{E}[v_j v_k] \\ &= \sum_{j=1}^{N} \left|\frac{\partial f_i}{\partial x_j}(\mathbf{x})\right|^2 \sigma_j^2 \approx \text{Var}[f_i(X_1, ..., X_N)]. \end{align*} \]
- JVP 的计算:在 NN evaluate 的时候能够同时计算
- 之前有人提出类似的,但是我们更快,我们只需要传递一个 scalar(他需要传递每一个多元泰勒的系数)
Denoising-Aware AS
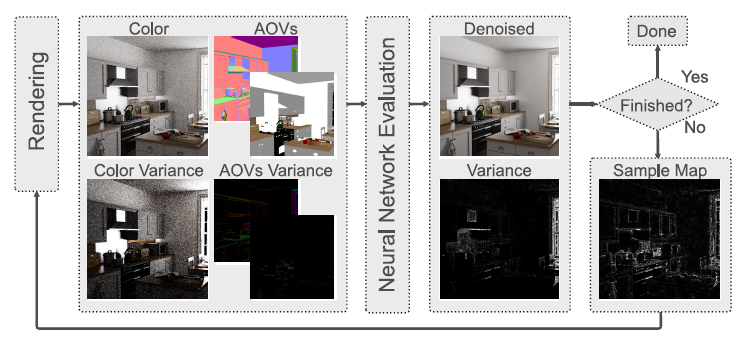
- 任意寻找一个基于 NN 的 denoiser
- initialization state:均匀采样
- rendering state:denoise accumulated 图像的同时计算 \(f(\cdot)\) 的 variance
- 然后按照公式操作,得到新图
- \(N_i\):累计的 spp 数目,增加 1 spp,带来的 Var 的降低
- relative(处理 unbounded image、避免过度优化过亮区域):\(\epsilon=0.01\)
\[ \frac{\text{Var}[f_i(\mathbf{x})]}{(N_i + 1)(f_i(\mathbf{x})^2 + \epsilon)},\quad(3) \]
- 得到新图后
- \(\max(v,0)\)
- \(\sigma=0.5\),\(5\times5\),gaussian filter:避免强烈的不连续性
- 归一化
Denoising with Post-Correction
- 我们的方差估计可以很好的和最近的工作相结合:Neural James-Stein (NJS) combiner
- NJS 框架
- 无偏估计:\(\mathrm{x}_a,\mathrm{x}_b\);降噪后的结果:\(f(\mathrm{x}_a),f(\mathrm{x}_b)\)
- \(f(\mathrm{x}_a),f(\mathrm{x}_b)\) 根据预测的 \(\alpha_i\) 进行混合
- 然后再和 \(\mathrm{x}=\left(\dfrac{\mathrm{x}_a+\mathrm{x}_b}{2}\right)\) 进行混合,混合系数 \(\rho_i\)(根据 James-Stein 理论计算得到)
\[ \rho_i(\alpha_i f(\mathrm{x}_a)+(1-\alpha_i)f(\mathrm{x}_b))+(1-\rho_i)\mathrm{x} \]
- 方差如下:所有的都能计算
\[ \rho_i^2 (\alpha_i^2 \text{Var}[f_i(\mathbf{x}_a)] + (1 - \alpha_i)^2 \text{Var}[f_i(\mathbf{x}_b)]) + (1 - \rho_i)^2 \text{Var}[\mathbf{x}] \]
- 计算完成之后,替换 式子 3 的分子,然后进行 AS
- 区别
- 这里我们忽视了 \(\rho_i,\alpha_i\) 本身也是随机变量(合理的,本身方差小)
- 忽略了 regression-based optimization(让 \(\mathrm{x}\) 在低 spp 中更好)
- 因为不忽略的话需要额外计算优化后图片的方差
Tone Mapping
- map to \([0,1]\)
- 相当于在 denoiser 外在套一个函数即可
- tone-mapping:\(\mathcal{T}:\mathbb{R}^N\to\mathbb{R}^N\)
- 于是整个过程:\(f_{\mathcal{T}}(\mathrm{x})=\mathcal{T}(f(\mathrm{x}))\)
- 计算梯度
\[ \frac{\partial}{\partial x_i} f_{\mathcal{T}_i}(\mathbf{x}) = \sum_{k=1}^{N} \left(\frac{\partial}{\partial f_k} \mathcal{T}_i(f(\mathbf{x})) \frac{\partial}{\partial x_j} f_k(\mathbf{x})\right) \]
- 此时再使用 公式 3 的时候,不需要再除以 \(f(\mathrm{x})^2\) 进行 relative 了(有界了)
Implementation
- PyTorch
- forward auto-differentiation (autodiff) 计算 JVP
- 网络实现,UNet + OIDN(v1.4.3 预训练的权重)
- 时间 3x longer than evaluating the Net
- 网络实现,可以换成任意的之前的 NN denoiser
- 时间大部分情况下和网络梯度反传差不多
- NJS 比较的时候,因为他们不是 pytorch 实现的,我们略去了 130ms 的切换
context 的时间【合理比较】
- 实现问题
- Mitsuba 3,2x2 block size
- AS 的时候,可能花更多时间渲染(复杂光路多 spp),这部分时间我们在对比的时候加上了
- 做了不同迭代轮的实验:spp \(4\to128\)
- 迭代轮越多,效果越好(足够之后,效果增加有限),但是上下文次数增加切换导致开销变大(render/denoise)
- 我们的 balance:32spp
AS with MC-SURE
- 计算 NN 的 SURE 系数,没有 denoiser 的 closed form,不能像 【2012-SURE-AS】那么计算
- 他的中间项是对角矩阵,直接就等价于 \(\sigma^2\mathbf{I}\)【不太懂具体原理】
- 参考 【EG2022】Progressive Denoising of Monte Carlo Rendered
Images,利用【2008-MC-SURE】计算
- 一阶泰勒近似
\[ (\mathbf{J}_f(\mathbf{x}) \cdot \hat{\Sigma})_{i,i} \approx \frac{1}{\epsilon K} \sum_{k=1}^{K} \left(b_k^T (\mathbf{f}(\mathbf{x} + \epsilon \mathbf{b}_k) - \mathbf{f}(\mathbf{x}))\right)_i \]
- \(b_k\sim\mathcal{N}(0,\hat{\Sigma})\),\(\epsilon=10^{-4}\),\(K=4\)(估计的样本数)
- 这样就将 SURE-AS 从显式的滤波函数推广到了 NN
- 使用 SURE 的时候,将 式子 3 的分子替换成 SURE
估计的 MSE
- 噪声更大,gaussian filter 需要更大(17x17,\(\sigma=4.0\))
Results And Discussion
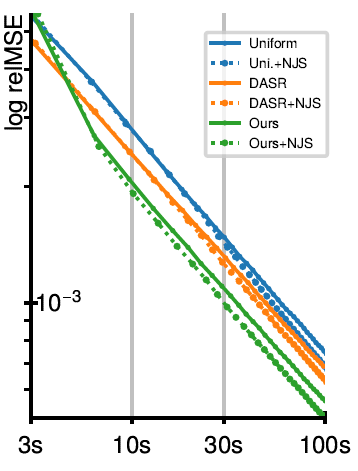
- equal-time
- 32-core CPU 渲染,RTX 3090 降噪
- metric:relMSE,\(\epsilon=0.01\)
- tone mapping 的时候,使用 RMSE(Root MSE)
实验
Path Tracing with Denoising(作为 baseline):我们 > MC-SURE > DASR
- 比 MC-SURE 好
- 我们的 variance estimate 的方差比 MC-SURE 更小(估计本身带有方差)
- 使用 variance 做 AS 比使用 error 更好(NN 输入的 variance 和 输出的 variance 有明确关系)
- 比 DASR 好
- DASR 只从1spp 中估计 sample map,缺乏可靠信息
- 比 MC-SURE 好
Post-Correction Denoising:和 NJS 结合
- 我们 > MC-SURE > DASR
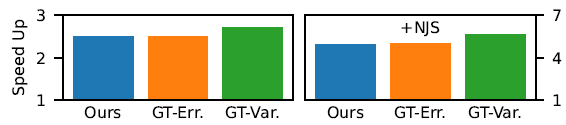
Comparison to Ground-Truth Sampling
- GT:每次迭代结束,通过 32 张累计的图片降噪后,计算估计(not impractical)
- 显示我们的方法和 GT 差不太多
- 同时说明:AS 正比于 Var 比 正比于 Error 更好(下图)
- 另外:虽然和 GT 相比,我们的估计还是有噪声的,但是效果上来说还行
- Tone Mapping:ACES
- 有界 => error 评估 RMSE
- visual error 越大样本越多
- 使用不同的 metric 作为 guiding AS,效果不一样
- 例如 Var 有利于 RMSE,relVar 有利于 relMSE
Limitations and Future Work
- limitations
- undersampling of small details(AS 普遍问题)
- 没有考虑 bias
- future
- 使用其他的 NN 架构
- randomized-QMC(quasi-Monte Carlo)
- Temporal denoising
- MC-SURE 可以使用上面定义的 \((\mathbf{J}_f(\mathbf{x}) \mathbf{v})_i
\mathbf{v}_i\) 估计 SURE 的中间项,能够优化 SURE
- 但是根据我们分析,使用 Var 引导 AS 比 Error 更好;认为不影响我们结论
- 【没有做实验】