(论文)[2022-SIGC] Neural Shadow Mapping
Neural Shadow Mapping
- 项目主页
- We propose a machine learning-based method that generates high quality hard and soft shadows for dynamic objects in real time.
- 优势
- 不需要光追硬件
- <6ms
- <1.5MB 内存
- 低端 GPU 可行
- 光栅化的硬阴影 => temporally-stable hard and soft shadows
- 输入包含光源大小:因此可以在训好的网络中生成软/硬阴影
相关工作
- 现代阴影算法:combine many cascaded maps
- Filtering-based
- PCF、PCSS
- statistical proxies:VSM、Convolution Shadow Maps
- Moment shadow maps(sota)
- Screen-space methods:使用 G-buffers
- Ray tracing hardware
OVERVIEW
- 训练:有监督学习
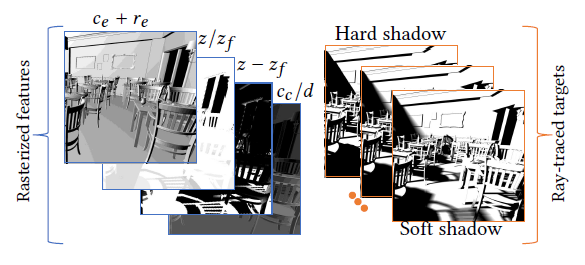
- 输入:shadow pass + G-Buffer pass 获取到的 buffer
- GT:ray traced shadow
- 网络(优化前):UNet(>25MBs、>100ms)
- 简单:即插即用
- 训练输入:光栅化不 MSAA(希望网络去学)
- view-space depth \(d\) and normal \(\mathbf{n}\)
- emitter-to-occluder depth \(z\) and emitter-space normal \(\mathbf{n_e}\)
- pixel-to-emitter distance \(z_f\) ,
the emitter radius (size) \(r_e\) for
spherical sources
- \(r_e\) 控制阴影软硬程度:\(0-4\)(点光源 - 半径为 50cm 的球)
- dot products \(\{c_e , c_c \}\) of \(\mathrm{n}\) with the emitter direction and \(\mathrm{n}\) with the viewing direction
- GT
- PT + mild Gaussian filter
- 8x multi-sample anti-alising (MSAA)
Feature selection
- feature selection network 效率低,而且带宽不友好,于是我们自己选
- 选择范围有 15 个通道:\(U=\left\{d,{\bf n},z,{\bf n_e},z_{f},c_e,c_{c}\right\}+\left\{z-z_{f},z/z_{f},c_{c}/d,{\bf n}\cdot{\bf n_e}\right\}\)
- 定义 sensitivity:给某个输入通道的纹理进行扰动,看对网络输出结果的影响
- Absolute sensitivity \(S_i\)
\[ S_i =\mathbb{E}\left[\frac{(\phi(f_{i}+\epsilon_{i})-\phi(f_{i}))}{0.1\sigma_{i}}\right], \epsilon_{i}\sim \mathcal{N}(0,0.1\sigma_{i}) \]
- relative sensitivity:\(s_i=S_i/\sum
S_i\)
- across different training instances(一个场景的多个实例)
- 选择过程:一开始使用所有通道,然后拒绝 \(s_i\) 最低的,重复直到所有的 \(s_i>1.5\%\)
- 最终结果:不同场景的 relative sensitivity【光源半径直接加到 \(c_e\) 上】
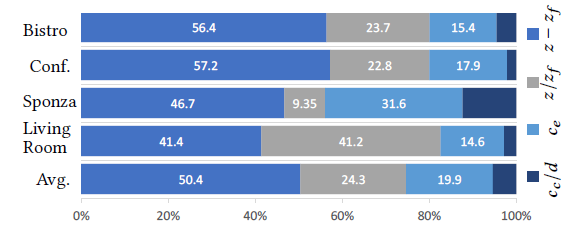
- 这样节省了 2.5ms
Loss function and temporal stability
- 两个要求
- 能够处理硬阴影边界和几何(AA 后处理)
- 训练和推理都不需要历史的 buffer
- 节省带宽 + 容易嵌入 tiled renderer
要求 1
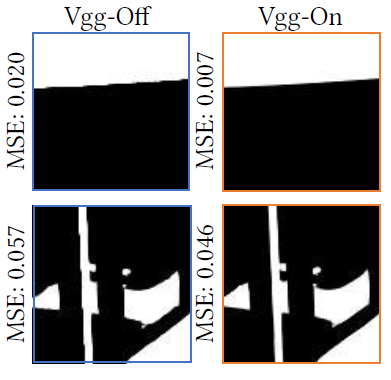
- a weighted combination of per-pixel difference and VGG-19 perceptual loss
- VGG 能起到抗锯齿作用
要求 2
- 时间上的不稳定性来源:shadow-map aliasing
- shadow map texels do not align one-to-one with screen pixels
- 小的移动可能会导致深度对比的时候有大的变化(尤其是阴影边界)
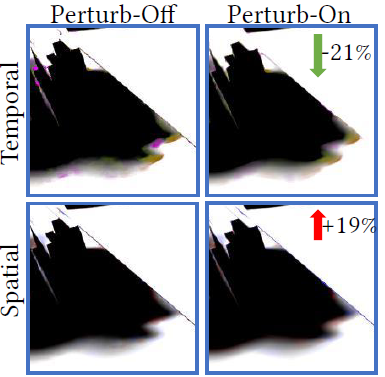
- noise2noise 论文启发:训练引入噪声(perturbation 扰动)
- 下面操作:在扰动的情况下,依然能得到变化不大的结果
- 每一个迭代轮,对 camera and emitter position 进行扰动
- 正比于 the distance from the scene and size of emitter
- 每次扰动,选择所有输入进行训练,但是只选择其中的一个状态作为真值
- 输入状态不同,但是 GT 相同
- 只有一个样本反传梯度,例如下面的红色的 \({\color{red}x_{0}}\)
- \(x_i\):网络输出,\(\tilde{x}\):GT
- \(p=3,\alpha=0.9\)
\[ \mathcal{L}=L({\color{red}x_{0}},\tilde{x})+\sum_{i=1}^{p}L({\color{red}x_{0}},x_{i}) \]
\[ {\cal L}(y,\tilde{y})\,=\,\alpha\cdot|y-\tilde{y}|\,+\,(1-\alpha)\cdot \text{VGG19}(y,\tilde{y}) \]
- 扰动:时间稳定性变好,空间模糊变多
Temporal stability measurement
- 之前的工作一起评估 spatio-temporal,因此不太好(因为我们牺牲了 spatial 想取得更好的 temporal)
- 构造
\[ E=\frac{1}{P}\sum_{p,t}\left\{\exp(\alpha D_{t}(p))-1\right\} \]
\[ D_{t}(p)\ =\ |I_{t}(p)-I_{t-1}(m(p))| \]
- \(m(p)\):应用 motion vector 到上一帧的结果
- \(P\):所有像素
- \(\alpha=3\):penalty for large changes
- We reject pixels that fail depth and normal comparison with its reprojection.
- 用这个指标去评价 temporal 的稳定性:效果比 TAA 好,而且 -1.3ms
- 这个指标是用于评价,而不是训练
Network architecture and optimizations
- 原版 UNet 太慢:>100ms
- 压缩
- 每一层:composed of one 3x3 convolution and one 1x1 convolution layer
- 上采样:bi-linear interpolation
- 快,不是原来的 transpose convolutions
- skip connections:使用算术和,而不是 feature concatenation
- 结果:25MB -> 2.5MB,28ms
- 半精度存储:1.5 MB,17ms
- 其他不提高 temporal 的修改
- Average-pool instead of Max-pool:更加平滑
- 去除第一层的 skip-connection:输入 depth 存在锯齿
- UNet 内到外的时间开销(通道/2,分辨率x4),由于存在 cache miss,时间不止 x2
- 其他优化:优化第一层(开销最大)
- naive:套一个降采样,最后上采样(会丢失细节)
- 我们 PixelShuffle/PixelUnshuffle:2x2 合成一个
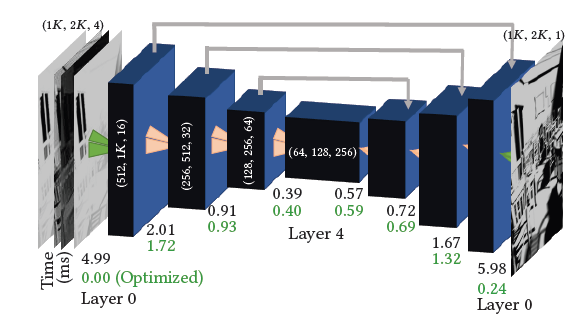
- 输入: \(h\times w\times ch\to h/2\times
w/2\times 4ch\)
- 1024x2048x4 \(\rightarrow\) 512x1024x16
- decoder 端逆向操作:512x1024x16 \(\rightarrow\) 1024x2048x4(最终还得变成
1024x2048x1)
- On the decoder side, to improve training convergence, we upscale the first output channel to full resolution using a bi-linear interpolation. We then add rest of the three channels to the interpolated output, filling in rest of the details
- 看这里的意思好像是 512x1024x4 \(\rightarrow\) 1024x2048x1【论文没标上采样通道数】
- 输入: \(h\times w\times ch\to h/2\times
w/2\times 4ch\)
- 此时优化到 5.8ms
Network depth optimizations
- 上面的优化都是通用的,下面的优化是 scene-specific 的
- 浅层网络:快(训练、推理)
- 我们先根据场景配置估计出最大的半影大小,然后根据这个值调整网络深度
- 假设:spherical occluder(或者 bounding sphere)
- 每个像素:认为半影大小 \(=x_a+x_b\)
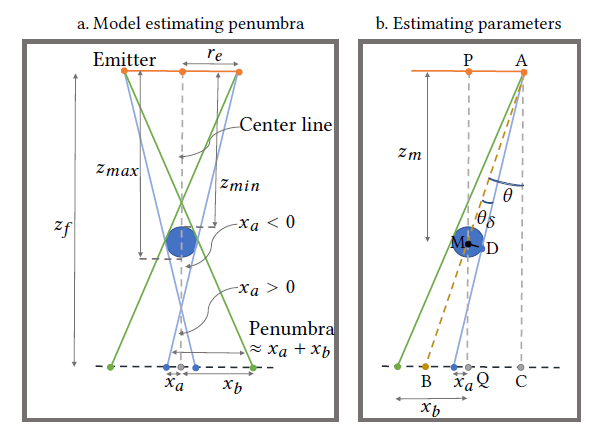 \[
\{x_a,x_b\}=z_f\tan(\theta\pm\theta_\delta)-r_e
\]
\[
\{x_a,x_b\}=z_f\tan(\theta\pm\theta_\delta)-r_e
\]
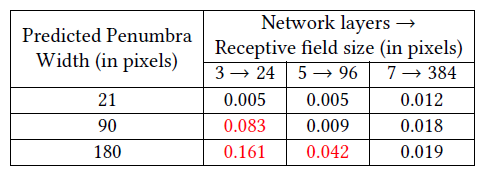
- 取所有像素所有帧的半影大小,95%分位数作为我们的判定值(\(x\) 个像素)
- 卷积让分辨率减半,感受野(effective receptive
field)随层数变化:\(\times2^l\)
- \(3\times3\) kernel:\(l=\log_2(p_w/3)\)
- 验证:3个网络层数:3、5、7,MSE 如下
结果
- 训练可以泛化:在一个场景中训完之后,可以在场景中加入没有见过的物体
- 对比算法:MSM、PCSS、GPU ray-tracing+denoise(5spp+SVGF)
- 分辨率:1kx2k
- 测试:AMD 5600X CPU and Nvidia 2080Ti GPU
- Each scene is trained on \(\le\) 400 images of resolution 2kx1k on a cluster for roughly 16 hours (75 training epochs)
limitation
- 常见屏幕空间问题:unavailability of layered depth information
- camera-space 和 screen space 像素不是一一对应的
- shading points 和 occluders 之间的距离不能准确计算