(论文)[2024-EGSR] Residual path integrals for re-rendering
Residual path integrals for re-rendering
- Bing Xu、Tzu-Mao Li、Iliyan Georgiev、Trevor Hedstrom、Ravi Ramamoorthi
- 项目主页
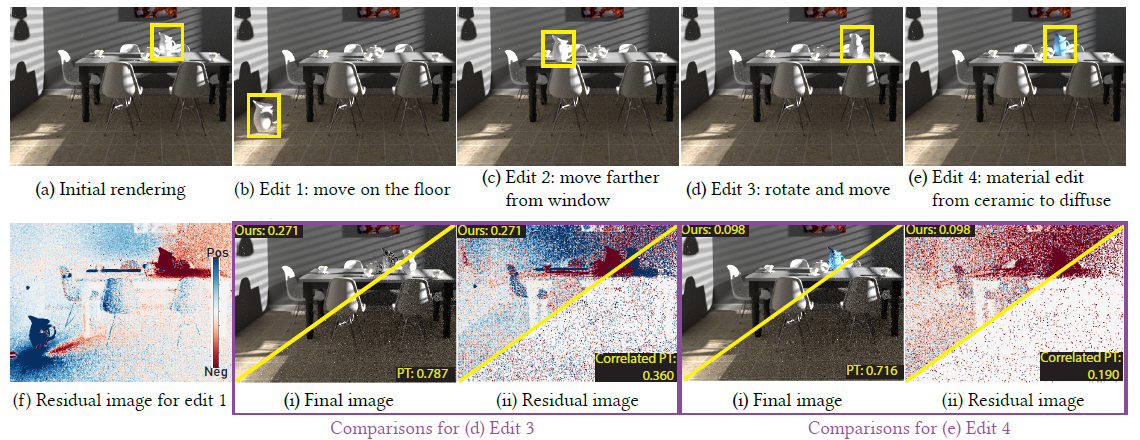
- 任务:移动场景中的物体,或者修改材质,更快的渲染得到修改后的图片
- teaser 如下,同时间比较
Introduction
- residual path integral
- 前一帧正确渲染,只渲染两帧之间的不同之处
- 贡献
- 将经典的 path integral 扩展到 residual path integral
- 在 residual path integral 中对 non-zero 贡献的路径进行重要性采样
- path mappings:新老路径之间的双射
Related work
- Temporal reprojection
- Spatio-directional caching, path guiding, and resampling
- Gradient-domain rendering
- Incremental radiosity
- Dynamic photon mapping and virtual point lights
- Scene editing and re-rendering
- Portal sampling
- sampling sparse path space (e.g., lights that go through a pinhole of a scene)
Residual path integral
Primal path integral
- 视子路出发,初始点 \(x_0\),BDPT 的范式(面积采样)
\[ I=\int_{\Omega}f(\boldsymbol{p})\;\mathrm{d}\mu(\boldsymbol{p}) \]
residual path integral
- 输入
- 前一帧的渲染结果 \(I_1\)
- 前一帧的当前帧的几何、材质配置
- 只有微小差别,只有很小部分在变化
- 计算 residual:\(I_2-I_1\)
\[ I_2-I_1=\int_{\Omega_2}f(\boldsymbol{p})d\mu(\boldsymbol{p})-\int_{\Omega_1}f(\boldsymbol{q})d\mu(\boldsymbol{q}) \]
- 找到映射:\(\mathrm{q}=T(\mathrm{p})\),重新参数化
- 简写:\(\Omega=\Omega_2\)
- \(f_1,f_2\):因为路径贡献必须在对应帧的配置下计算
\[ \begin{aligned} I_{2}-I_{1}& =\int_{\Omega}\left(f_{2}(\boldsymbol{p})-f_{1}(T(\boldsymbol{p}))\left\vert T'(\boldsymbol{p})\right\vert\right) d\mu(\boldsymbol{p}) \\ &=\int_{\Omega}f_{\mathrm{d}}(\boldsymbol{p}) d\mu(\boldsymbol{p}) \end{aligned} \]
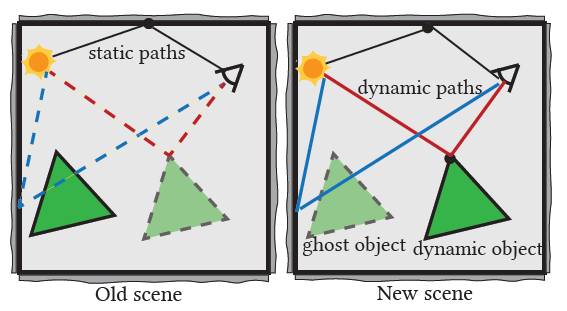
- 示意图
- ghost object(上一帧位置)
- dynamic object(现在位置)
- 对应修改材质,则重合
Characterizing dynamic paths
- dynamic path:在当前帧下,满足下面两个条件之一,示意图
- 有顶点落在 dynamic object 上(at least one dynamic vertex)
- 有边经过 ghost object(at least one dynamic edge)
- 反之为 static path
Dynamic path space
- small changes => 大部分是 static path => 对 residual 没有贡献
- \(\Omega =
\mathcal{D}\cup\mathcal{S}\)
- \(\mathcal{D}\):dynamic path space
- \(\mathcal{S}\):zero-contribution static path space
- 目的:高效采样空间 \(\mathcal{D}\)
Sampling the dynamic path space
采样从 ghost/dynamic object 出发
- 采样点 \(x_{D}/x_{G}=y_0=z_0\)
- 生成两条子路径 \(y_0\cdots
y_{s-1},z_0\cdots z_{t-1}\)
- 如果子路径只有一个点,则称为 \(x_{L}/x_{E}\)
光源:NEE,相机:light tracing(和 NEE 类似连相机?)
分类
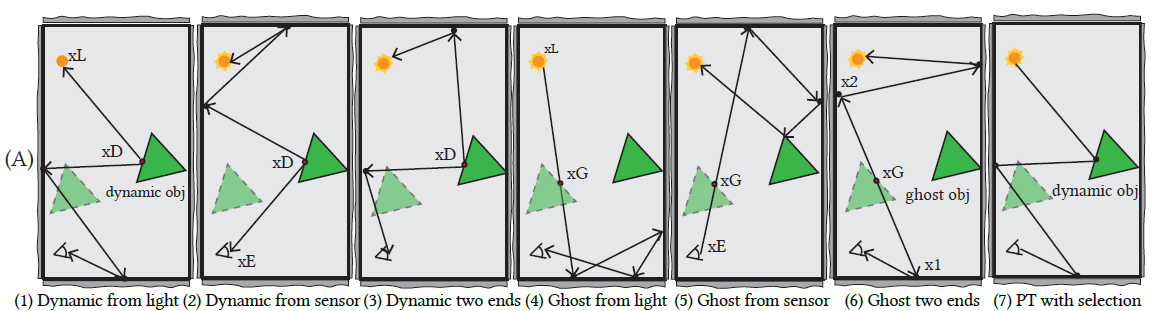
Sampling dynamic vertices
(1)Dynamic from light
- light subpath 只有一个点 \(x_{L}\)
- BSDF 采样 light subpath
(2)Dynamic from sensor
- eye subpath 只有一个点 \(x_{E}\),和 (1)对称
- (1) (2) 在直接光照下等价,3 个顶点,此时只通过 (1)处理
(3)Dynamic two ends
- 光源方向:法向半球采样
- 相机方向:BSDF 采样
Sampling dynamic edges
- 先在 ghost object 表面采样一个点(按面积采样)
(4)Ghost from light
- 面积采样得到 \(x_{G}\)(最终是不作为路径节点的)
- 采样光源 \(x_{L}\)
- \(\overrightarrow{x_{L}x_{G}}\) 作为方向,求交得到 \(z_1\)
- pdf 计算
\[ p(\bar{x})=p(x_{L})\overrightarrow{p_1}(\bar{z})\prod_{i=2}^{t-1}\overrightarrow{p_i}(\bar{z}) \]
- \(p_1\):面积转立体角转面积(这下面其实省略了微分部分 \(\mathrm{d}\))
- 利用立体角作为中间量建立联系
\[ \overrightarrow{p_1}(\bar{z})=p(x_G)\frac{\Vert x_G-x_L\Vert^2}{\left|n_{x_G}\cdot\overrightarrow{x_Gx_1}\right|}\cdot\frac{\left\vert n_{x_1}\cdot\overleftarrow{x_Gx_1}\right\vert}{\parallel x_1-x_L\parallel^2} \]
(5)Ghost from sensor
- 采样相机 \(x_{E}\),和 (4)对称
(6)Ghost two ends
- 采样 \(x_{G}\)
- 均匀采样一个方向 \(p_{dir}\),由这个方向,自然的形成点 \(x_1,x_2\)(如图)
- 然后向两端 BSDF 采样延伸(+NEE)
- pdf 计算
\[ p(\bar{x})=\prod_{i=1}^{t-1}\overrightarrow{p_{i}}(\bar{z})\prod_{i=1}^{s-1}\overrightarrow{p_{i}}(\bar{y}) \]
\[ \begin{aligned} \overrightarrow{p_{1}}(\bar{z})\overrightarrow{p_{1}}(\bar{y}) &=p(x_{G})\cdot g_{G,x1,x2}\\ &=p(x_{G})\cdot \frac{\left\vert\cos(N_{x_1},\overleftarrow{x_1x_2})\right\vert\cdot\left\vert\cos(N_{x_2},\overleftarrow{x_1x_2})\right\vert}{\left\vert\cos(N_{x_G},\overleftarrow{x_1x_2})\right\vert}\cdot\frac{p_{\mathrm{dir}}}{\Vert x_1-x_2\Vert^2}\\ \end{aligned} \]
- 具体推导有两步
- 立体角转换为面积
\[ p_{\mathrm{dir}}=\frac{\Vert x_1-x_G\Vert^2}{\vert\cos(N_{x_2},\overleftarrow{x_1x_2})\vert}\cdot \overrightarrow{p_{1}}(\bar{y}) \]
- 面积转换为另一个面积,上面的(4)是一样的
\[ \overrightarrow{p_1}(\bar{z})=p(x_G)\frac{\Vert x_G-x_1\Vert^2}{\left|n_{x_G}\cdot\overrightarrow{x_Gx_1}\right|}\cdot\frac{\left\vert n_{x_1}\cdot\overleftarrow{x_Gx_1}\right\vert}{\parallel x_2-x_1\parallel^2} \]
- 两个式子,计算下 \(\overrightarrow{p_{1}}(\bar{z})\overrightarrow{p_{1}}(\bar{y})\) 就得到结果了
讨论
- 采样技术的好坏,取决于场景
- 如果 ghost/dynamic objects 容易连接到光源和相机,那么(3)(6)用处不大,反之效果好
- 如何实现整条光路的映射,看最后章节
Technique combination
- MIS
- 例如如下情况,有 5 种采样方式
- ghost hit 作为起点(4),dynamic hit 作为起点(1)
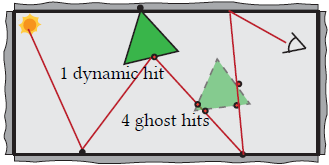
- \(N_k\) 长的路径,和 dynamic object
有 \(N_D\) 个交点,和 ghost object 有
\(N_G\) 条边相交,那么就一共有 \(N_D+N_G\) 种采样策略
- 这么说的话,应该是把 (1)(2)(3)区分开了(从论文中这 3
种路径的正则表达式也可以看出)
- 3 个节点的直接光照只会被(1)采样得到
- (3)不包括采样相机和光源
- 这么说的话,应该是把 (1)(2)(3)区分开了(从论文中这 3
种路径的正则表达式也可以看出)
- 另外加上常规的 PT,用于渲染 static path(补齐整个采样空间)
- 有些光路使用 camera tracing 更容易追到
- (7)PT with selection
- MIS:平衡启发式,\(N_D+N_G+1\)
种采样技术
- \(<7\):可能连接失败,可能 rejection
- 计算复杂度:\(O(N_D+N_G)\)
- 在每一个点上保存累乘的 forward/backward
pdf,计算的使用总的除以记录的
- 和 BDPT 实现类似(mitsuba)
- \(O((N_D+N_G)\times N_k)\) 降至 \(O(N_D+N_G)\)
- 在每一个点上保存累乘的 forward/backward
pdf,计算的使用总的除以记录的
Path mapping
- 思路,转换为每一个节点的变换
- sensor -> emitter
\[ T(\boldsymbol{p})=T(x_0x_1\ldots x_{k-2}x_{k-1})=t(x_0)t(x_1)\ldots t(x_{k-2})t(x_{k-1}) \]
- 示意图
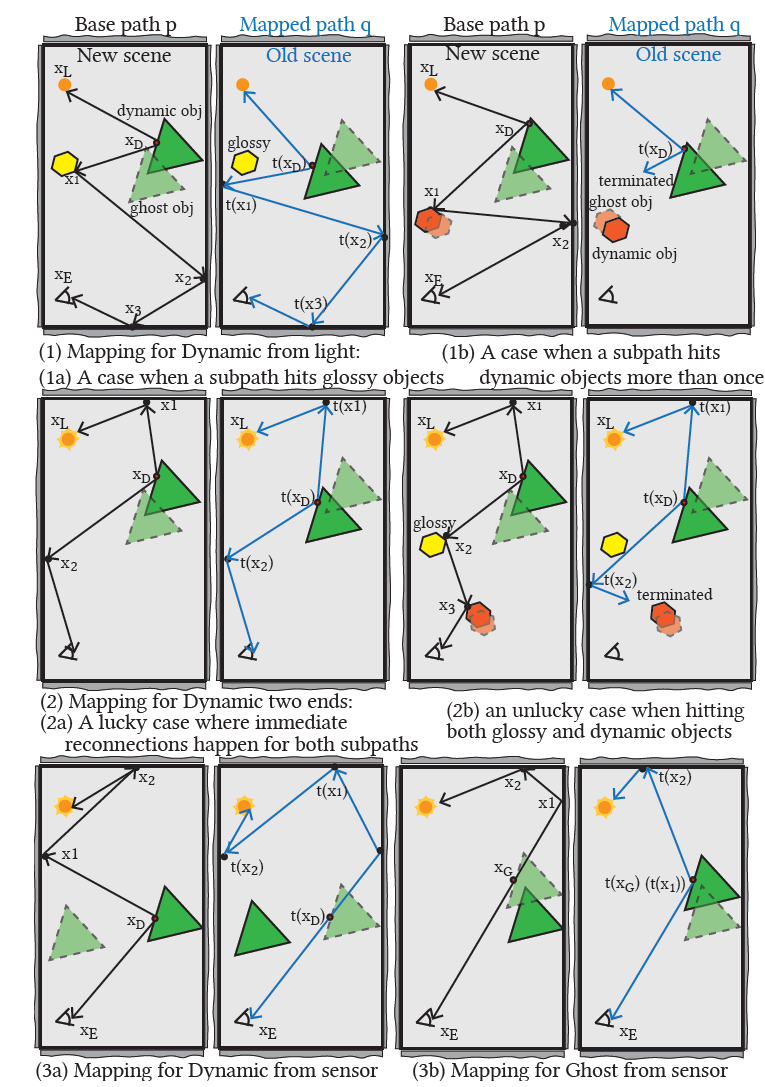
- 有 5 种基本变换形式 \(t\),对应 Jacobians \(\vert{t'}\vert\)
object movement
- Transform with object movement
- dynamic/ghost obejct 上的刚性变换
- \(t(x_i)=T_{obj}(x_i)\quad\mathrm{if}\quad x_i\in\{x_D,x_G\}\)
- For rigid motions of articulated bodies, \(\vert{t'}\vert=1\)
- 如图 (1b)所示,如果 base path 和 dynamic obejct
有多个交点,则拒绝映射(如何处理?)
- 可能会引发很大的区别
same vertex
- Keep vertex the same
- static object 上的顶点不变
- \(t\left(x_{i}\right)=x_{i}\quad\mathrm{if}\quad x_{i}\in\{\mathbf{x}_{S}\}\)
- \(\vert t'\vert=1\quad\mathrm{if}\quad t\left(x_{i-1}\right)=x_{i-1}\)
- 这样的操作允许 path re-connection(前一个点 \(x_{i-1}\) 可以和当前点 \(x_i\) 连接)
- 此时,如果 \(x_{i-1}\) 被映射到了另外的点,\(\vert t'\vert\) 不再是 1
\[ \mid t'\mid=\frac{\cos\left(t\left(x_{i-1}\right)\leftarrow x_i\right)}{\cos\left(x_{i-1}\leftarrow x_i\right)}\cdot\frac{\Vert x_{i-1}-x_i\Vert^2}{\Vert t\left(x_{i-1}\right)-x_i\Vert^2}. \]
- 一个 path 避免多次连接(可能导致很大的 Jacobian)
- Jacobian 的累乘
- 连接条件:参考 ResTIR
- \(x_i\) 不是 dynamic vertex
- roughness threshold:\(\min\left(\alpha(x_{i-1}),\alpha(t(x_{i-1})),\alpha(x_{i})\right)\geq\alpha_{min}\)
- distance threshold:\(\min\left(\|t(x_{i-1})-x_{i}\|,\|x_{i-1}-x_{i}\|\right)\geq d_{min}\)
random replay
- Random-seed replay
- 使用同样的随机数生成 ray \(\overrightarrow{x_{i-1}x_{i}},\overrightarrow{t(x_{i-1})t(x_{i})}\)
dynamic/ghost pair
- Mapping between the dynamic and ghost pair
- 直接映射到对应点,然后继续光追
- 上图的 3a、3b
Path rejection
- Path rejection
- 当 path mapping 失败或者主动停止时,使用这个方案
- 主动停止条件
- mapped path 重连的时候被遮挡(或被 dynamic obejct 遮挡)
- Jacobian 超过阈值(导致 fireflier),设置为 10
- base path 多次击中 dynamic object(>1)
- 条件1、3 发生较少,因为移动较少
- dynamic objects 占据较多时发生多
- 条件 2 发生更少
- 具体方式,无偏性的保证
- we sample from both frames and employ two-way path mapping to ensure the coverage of the entire integral domain.
- 和论文类似:Improved sampling for gradient-domain Metropolis light transport
Results and discussion
实现
- 渲染器:Intel Embree
- AMD Ryzen 16-Core Processor
- 额外维护两个加速结构:dynamic/ghost obejcts
- dynamic:连接的时候可见性测试
- ghost:计算 MIS 需要
- 代价很小:只有少部分会移动
- 无偏测试:能收敛到 reference
Incremental re-rendering
- 对比算法:PT,Correlated PT
- PT:只考虑移动物体对相机直接可见的场景(公平性)
- 感觉对 PT 不应该都一样吗?对 residual 难度不一样?
- 大部分测试场景都是 PT 友好的
- Correlated PT:不太懂具体怎么做的
- 渲染 residual,然后累加
- 比较 reference、residual reference 的区别
- 等时间的 MSE 都低
- dynamic object 距离光源越近,residual 越大
- 我们的方法不管距离怎么变化,收敛都很快
- 在这种情况下,直接 PT 有可能会更好
- Scene Editing
- 当光源/相机移动的时候,最优的退化为 light/camera tracing
- 材质编辑则比较简单,不需要 MIS 采样那一大堆
Timings and overhead
- 光线从中间物体出发,cache miss 很严重
- 留到 future work:potential batching and coherency optimization
- 计算开销:10-20%
- 因此,同时间对比中,PT 有更多光线(random walk)
Ablations and analysis
- 只展示变化部分(\(\mathcal{D}\))
- PT with selection:path tracing where only the paths affected by the dynamic objects are selected and contributing to the shown image
- 论文效果更好(比 PT 好)
- path mapping 是否开启
- 关闭:不做 mapping,而是在两帧图像中各自采样论文中的采样策略,计算图像
- path mapping 有效
- 当移动的物体变多,论文方法变差
- 论文假定:变化东西很少
- 当物体变化的量变大,论文方法能保持一致,但是 path mapping 作用减弱
Limitations
- 可以和 light/camera tracing 结合
- 算法不适合 camera/light 移动的场景
- 不同的 dynamic/ghost 上的方差不同:适应性采样
结果与展望
- Conclusion
- theoretical framework
- future work
- better importance sampling techniques
- better path mappings
- 上面二者联合优化
- 支持 deformable movement
- 参与介质(体渲染)
整条光路的映射
- base path \(\boldsymbol{p}\) from new scene \(\to\) old scene
- 标准 PT 可以让帧间使用相同的随机数,以增强相关性;动态场景则比较难
- 我们的方法起点在光路中间,不确定是在哪个像素,因此很难使用这个
- 核心思想:尽早的进行 path reconnection,原因如下
- efficiency, in terms of path reuse
- increasing correlation between the two paths
- 连接之前使用 Random seed replay(增强相关性)
- Dynamic from sensor
- 图上的 1a 是一个例子,\(x_1\) 无法连接,因为 glossy 条件;直到 \(x_3\) 才满足连接条件
- 图上的 2 也是满足的例子
- Dynamic from sensor
- 3a 中 \(t(x_D)\) 延长线的交点和 \(x_1\) 不连接,是因为 large Jacobian
- 当物体移动过大的时候,Dynamic from sensor 使用 Transform with object movement 策略,效果不好,相关性很差
- 这里使用直接延长的策略
- Ghost from sensor 也类似
- Ghost from light、Ghost two ends 这两种情况
- 直接使用 independent tracing
- 使用和上面差不多的方式,相关性较差;原因是 ghost 都是空的,会打到其他物体,从而贡献给其他像素
总结
- 满抽象的,不太理解无偏性的保证
- 这个 mapped path 的形成方式是唯一的吗?不唯一的话需要计算 pdf 吧
- 无偏的原因?
- 和 dynamic object 只会有一次相交,在采样前的操作的都是确定性的操作