(论文)[2024-SIG-C] Neural Bounding
Neural Bounding
- 作者:Stephanie Wenxin Liu
- 项目主页,有开源代码
- RTX 3090 感觉跑起来很慢,半小时了一个都还没跑完
贡献
- 提出了一种新的求 bounding 的方式,引入非对称的 loss 去限制 FN=0,但是训练很慢,推理也比较慢,但是 bounding 更加紧致,不能泛化(单物体训练)
- 感觉它把非对称 loss 当作最大贡献了
- 引入网络也算创新点吧
- 不太懂为啥能发出来,感觉乱七八糟的。。。
Abstract
- Bounding Volume 可以转化为一个分类问题:这个空间是否被占据
- 要求
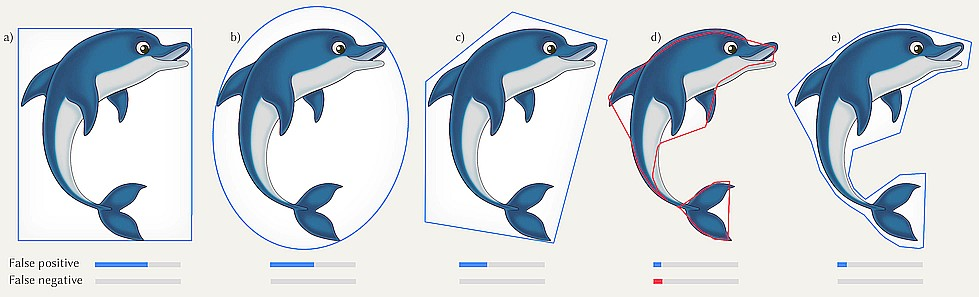
- false positive(FP)尽可能少:效率高
- false negative(FN)不能出现:保证正确性
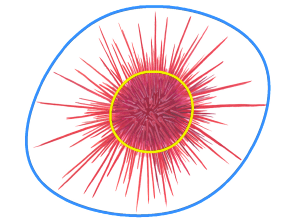
- 示例:box (a), ellipsoid (b), k-oriented planes (c), common neural networks (d) and a neural network trained using our approach (e)
Introduction
- BVH 的 trade offs
- 和 bounding primitive 求交的计算代价
- 和原始 primitive 求教的计算代价
- bounding primitive 的 FP rate
- 理想的 bounding 策略:FP rate 低、bounding primitive 的计算代价低
- 经典策略:spheres, boxes, oriented boxes, k discretely-oriented
polytopes (k-DOPs)
- result in poor FP rates as they remain convex
- 本文,利用 NN 实现
- high-dimensional, non-linear, concave bounding with a combination of simplicity, flexibility and testing speed
- 挑战:如何让 NN 的 FN rate 为 0
- 两种策略
- 先找 bounding,然后使用 NN 近似
- 使用 NN 去估计复杂几何体,然后进行保守估计
- 为了实用:网络需要 small and simple(快)
- 应用
- two, three and 4D point queries, 2D and 3D range queries as well as queries of dynamic scenes
- 传统方法的优化
previous work
- k-DOPs、AABB 等
- BVH
- NN
- Neural intersection functions:不是保守的,静态场景
- Occupancy Networks(CVPR2019)
- 其他领域
- Neural Polytopes
- Neural collision detection for deformable objects
- 非对称 loss
our approach
Method
- 学习一个 indicator function \(f(\mathrm{x})\in\mathbb{R}^{n}\to\{0,1\}\)
- 1:inside、on the surface
- 0:else
- query function \(g(\mathrm{r})\in\mathbb{R}^{m}\to\{0,1\}\),region
\(\mathrm{r}\)
- 1:存在一个 \(\mathrm{r}\) 中的点 \(\mathrm{x}\) 满足 \(f(\mathrm{x})=1\)
- 0:else
- 点查询:\(g=f\)
- 范围查询:\(\mathrm{r}\) 是区域的一个参数化(例如 AABB 的两个端点)
- \(h_{\theta}(\mathrm{r})\in\mathbb{R}^{m}\to\{0,1\}\)
- 可学习的参数 \(\theta\)
- 当 \(g=1\) 的时候,严格为 1;其他没关系(允许 FP)
- loss \(\mathcal{L}\)
- \(\alpha\to\infty\) :不允许 FN
- \(\beta=1\):FP 越少越好
\[ \mathcal{L}(\theta)=\int c(\mathbf{r})\mathrm d\mathbf{r} \]
\[ c(\mathbf{r})= \begin{cases} 0& \text{if}\ g(\mathbf{r})=0\ \text{and}\ h_\theta(\mathbf{r})=0,&\text{TN}\\ \alpha& \text{if}\ g(\mathbf{r})=1\ \text{and}\ h_\theta(\mathbf{r})=0,&\text{FN}\\ \beta& \text{if}\ g(\mathbf{r})=0\ \text{and}\ h_\theta(\mathbf{r})=1,&\text{FP}\\ 0& \text{if}\ g(\mathbf{r})=1\ \text{and}\ h_\theta(\mathbf{r})=1,&\text{TP} \end{cases} \]
- \(c\) 不连续,只有在 surface 边界才有导数
- 无穷无法处理
- \(\mathcal{L}\) 的修改
- \(\alpha(t),\beta(t)\) 替换 \(\alpha,\beta\):极限意义上 FN 的代价还是
\(\infty\)
- \(t\uparrow\Longrightarrow\alpha\uparrow,\beta\downarrow\)(补充材料是不是说反了,和前面这里的逻辑反一下)
- \(\alpha\) 变化就够了(引入了不对称性),\(\beta\) 反向变化是为了加速训练
- 代码里面其实只修改了降低了 \(\beta\)
- FN:\(\hat{y}=0,y=1\),loss 体现在 \(\alpha\) 项
- \(t\uparrow\Longrightarrow\alpha\uparrow,\beta\downarrow\)(补充材料是不是说反了,和前面这里的逻辑反一下)
- \(\alpha(t),\beta(t)\) 替换 \(\alpha,\beta\):极限意义上 FN 的代价还是
\(\infty\)
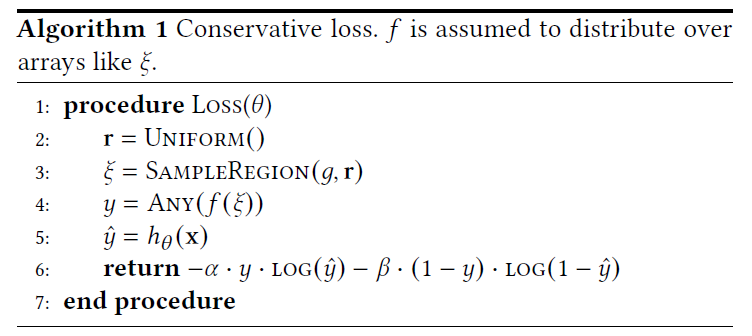
- weighted binary cross-entropy(indicator function)
\[ \hat{\mathcal{L}}(\theta)=-\mathbb{E}_i[\alpha(t)\cdot y_i\log(\hat{y}_{i,\theta})+\beta(t)\cdot(1-y_i)\log(1-\hat{y}_{i,\theta})] \]
\[ \hat{y}_{\theta}=h_{\theta}(\mathrm{x}),y=f(\mathrm{x}) \]
- 计算流程如下(region query function)
Neural Bounding Hierarchies
- 树结构需要用户构建:NN 只在每个节点上进行
- 有点无语的。。。。。。
Neural Early-out
- bounding hierarchies 的好处:不像其他 NN
一样,可以提前结束测试(节省计算时间)
- 加入 additional conservative and negated immediate loss
- 举例:MLP(\(A_1\) 层、\(\text{nl}\) 非线性激活层、\(A_2\) 层)
- 常规 loss
- bce:binary cross-entropy
- \((\cdot\mid1)\):the bias-trick(offset,\(Ax+b\) 中的 \(b\))
\[ \mathcal{L}_{\text{Late}}(\mathbf{r})=\mathrm{bce}(h_{\theta}{}^{\text{Late}}(\mathbf{r}),g(\mathbf{r})) \]
\[ h_{\theta}^{\text{Late}}(\mathbf{r})=\mathrm{nl}\left(\mathrm{A}_{2}\times(\mathrm{nl}(\mathrm{A}_{1}\times(\mathrm{r}\mid1))\mid1)\right) \]
- 更新后的 loss
- 加入\(A_3\) 层(小网络)
- \(h_{\theta}^{\text{Early}}(\mathbf{r})\) 和 \(h_{\theta}^{\text{Late}}(\mathbf{r})\) 相反
\[ \mathcal{L}_{\text{Early}}(\mathbf{r})=\mathcal{L}_{\text{Late}}(\mathbf{r})+\mathrm{bce}(h_{\theta}^{\text{Early}}(\mathbf{r}),1-g(\mathbf{r})) \]
\[ h_{\theta}^{\text{Early}}(\mathbf{r})=\text{nl}(\mathrm{A}_{3}\times(\mathrm{r}\mid1)) \]
- 测试的时候,先运行 Early NN
- 如果输出 negative,那么就认为是 negative 不再执行
- 输出 negative 应该指的是 \(1-h_{\theta}^{\text{Early}}(\mathbf{r})\) 是不相交?是这个意思吗?
- 否则再执行 Late NN,得到最终结果
- 如果输出 negative,那么就认为是 negative 不再执行
- Early 和上面的 loss 相比,是 inverse conservative
- 不太明白为什么有用?感觉就是估计了一个 Late 的 \(1-\text{Late}\),效果应该和前面类似
- 可能是小网络,更加快速近似?这个保守性为啥会更好?
- 在 NN 很大的时候,这样的 Early 技术,可以有多层,帮助节省时间
- 点查询快 1 倍,范围查询快 25%
- 代码中没有这个部分,不太懂具体原理
Implementation
- 我们的方法与具体应用的实现无关,但是有些结构会影响我们的 bounding 的 tightness
Architecture
- MLP:支持任意维度的查询(不同的查询方式是需要单独训练网络的)
- 中间层激活函数:Sinusoidal(正弦)
- 输入:采样得到的 mD query
- 输出:sigmoid 归一化到 \((0,1)\),然后四舍五入到 \(\{0,1\}\)
- 有 positional encoding
- 没有 residual-、skip-connections、Batch-Normalization(实验效果不好,可能是因为网络比较浅)
- PyTorch
Training
- Adam(lr=\(\text{1e-3}\))
- batch size of 200,000
- early-stop the training as soon as FN = 0(6 次迭代左右)
- 训练时间:20 to 60 minutes on a modern workstation
- an RTX3090 GPU and Intel i9-12900K CPU(真的吗?不太信)
- 泛化
- 针对单物体训练,不泛化
- generalization of bounds across the hypercube of space, time, query type, and combinations thereof.(查询种类泛化)
Evaluation
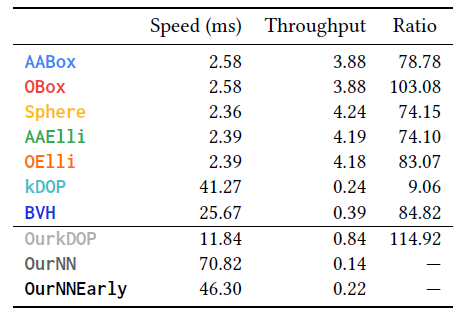
- 对比算法
- AABox、OBox
- Sphere
- AAElli and OElli
- kDOP(\(k=4m\))
- BVH:只用于判断是否被包围(shadow ray 比较像)
- 论文算法
- OurNN、OurNNEarly
- OurReLUField(neural grid method):训练快,但是低维度
- OurkDOP:用于 kDOP 的优化
- 对比算法:NN
- OccNet(Occupancy Networks,对称 loss,\(\alpha=\beta=1\))
- 只比质性结果,OccNet 不保证 FN = 0
- 可能也会出错,论文说是数值问题
- 结果:find fewer than 1 FN in 100 million queries on hidden test sets
- 训练越多结果越好
Tasks
- task
- 查询维度:\(n=2,3,4\)
- 查询方式:points, rays, planes and boxes
- Indicators
- 2d 数据集(9 张图片), 32x32 的图片(黑白 2 色),真的离谱这学半小时都还学不出来
- 3d 数据集(9 个体素),binvox 格式(在线查看),32x32x32
- 4d 数据集(3 个),3d 模型围绕中心旋转,10x32x32x32
- 对于传统方法,例如 AABB 来说,旋转比平移更容易(平移会将其拉的更大,FP 会更多)
- 感觉一样吧,大家都简单了
| bunny | chair | dragon1 | dragon2 | house | lucy | star1 | star2 | teapot |
|---|---|---|---|---|---|---|---|---|
 |
 |
 |
 |
 |
 |
 |
 |
 |
- Query types:point-, ray-, plane- and box-queries
- ray:起点和方向
- planes:normal + 面上的一个点(Aliased Rays 的问题?)
- boxes:最大最小的两个顶点
- 询问:
any(),有相交就是相交
Metrics
- tightness、execution speed
- tightness
- MC 的方式计算 FP(越小说明越紧致)
- FN 应该严格等于 0
- execution speed
- 10,000 independent runs with 10 million randomly sampled
- 都是 pytorch 上实现,向量化并行,充分利用 GPU(感觉 3090 在睡觉)
Results
Quality
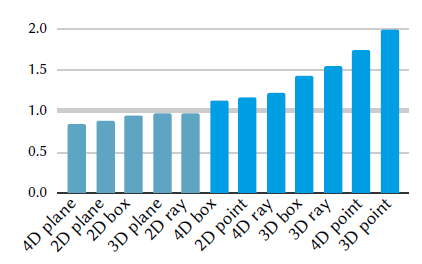
- FP rate(tightness)
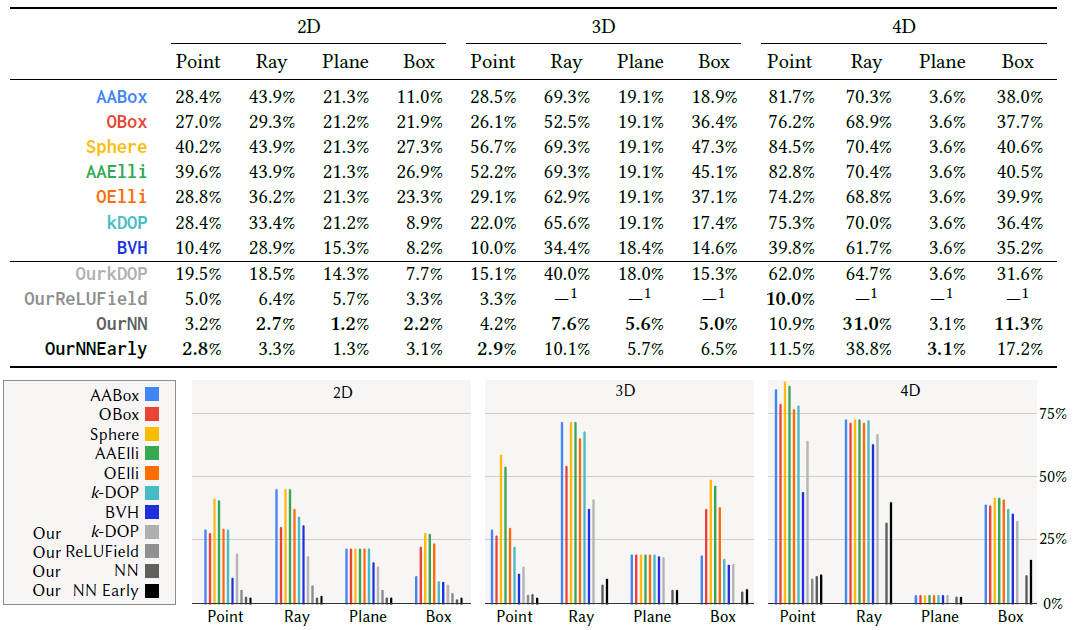
- 论文效果很好,其次的是 BVH(呵呵呵)
- 维度增加都变差了(问题变难了)
- 随着 NN 的而复杂度增加,NN 的 bounding 会更加 tight
- 能够通过互换 \(\alpha,\beta\) 实现
- FP=0(\(\alpha,\beta\) 互换):黄色 bound
- FN=0(正常):蓝色 bound
- NN+BVH:父节点的 bound 不需要包含子节点的 bound

Speed
- 慢一些,但是能和 kDOP 差不多
- throughput:x billions tests per seconds
- 这咋算的?
- Ratio:下面解释
Discussion
- 比传统方法慢,为啥还有应用价值?
- tightness and scalability
tightness
- \(t\):精细几何求交开销
- \(t_i\):bounding 方法开销
- \(p_i\):FP 的概率(FP+TP=1)
- \(N\) 次测试的计算开销如下:\(Nt_i+p_i\cdot N\cdot t\)
- 或者这么理解,首先大家的 FN=0,所以范围 \(\mathrm{r}\) 都可以分为 3 个区域:\(A,B,C\)(并为全集)
- \(A\) 区域返回没有相交,此时 FN=0,于是返回没有相交(额外开销 0)
- \(B\) 区域为 FP 区域,此时需要进行精细求交(额外开销 \(N\cdot t\))
- \(C\) 区域为 TP 区域,此时大家都需要精细求交(额外开销 \(N\cdot t\))
- 此时总的开销为 \(Nt_i+B\cdot N\cdot
t+C\cdot N\cdot t\),最后一项相同,只需要比前两项
- \(p_i=\dfrac{B}{A+B+C}\)
- 对比不同方法,A 方法优于 B 的条件
\[ \begin{aligned} N\cdot t_{a}+Np_{a}\cdot t& <N\cdot t_{b}+Np_{b}\cdot t \\ t_{a}+p_{a}\cdot t& <t_b+p_b\cdot t \\ t_{a}+p_{a}\cdot t-p_{b}\cdot t& <t_{b} \\ p_{a}\cdot t-p_{b}\cdot t& <t_b-t_a \\ t(p_{a}-p_{b})& <t_b-t_a \\ \end{aligned} \]
\[ \begin{aligned} (p_{a}-p_{b})>0&\Longrightarrow t <(t_b-t_a)/(p_a-p_b) \\ (p_{a}-p_{b})<0&\Longrightarrow t>(t_{b}-t_{a})/(p_{a}-p_{b}) \end{aligned} \]
- Ratio
- \(a=\text{OurNN}\),\(b\) 为对应行算法
- 首先 \(p_a<p_b\),因此只需要满足 \(t>\text{Ratio}\cdot t_b\),那么 OurNN 就更优
- 上面的 Ratio 很容易实现,因为一个节点中常常含有很多三角形(Millions)
Early-out
- runtime:OurNNEarlyOut/OurNN
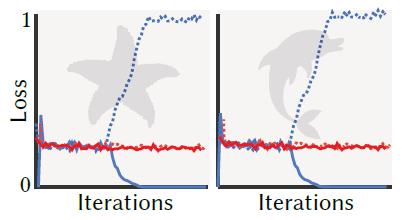
Convergence
- 没太懂这一段想表达什么
- 非对称 loss 的好处
- 蓝色:我们方法;红色:一般方法
- dot:FP;solid:FN
- FN 变成 0 的代价是 FP 会增加
- 所以 FN 变成 0,就结束训练?
scalability
- 高维空间例子
- 在一个训练好的 VAE 生成数字的模型中,10d 隐空间 + 2d像素位置,让生成的数字加上 bounding

Limitations
- 不能保证 no FNs
- 不能在物体间泛化,trained per-object,训练慢
- 加速训练:tinycudann、meta-learning
- 运行速度也比较慢
- sampling the indicator only works if object- and query-dimensions
align
- ?
- 网络引入额外内存开销,比之前方法大很多