(论文)[2023-SIG] 3D Gaussian Splatting for Real-Time Radiance Field Rendering
3DGS
- 3D Gaussian Splatting for Real-Time Radiance Field Rendering
- 作者
- Bernhard Kerbl、Georgios Kopanas、George Drettakis(Inria, Université Côte d’Azur, France)
- Thomas Leimkühler (Max-Planck-Institut für Informatik, Germany)
- 项目主页
Abstract
- 3DGS
- 实时渲染
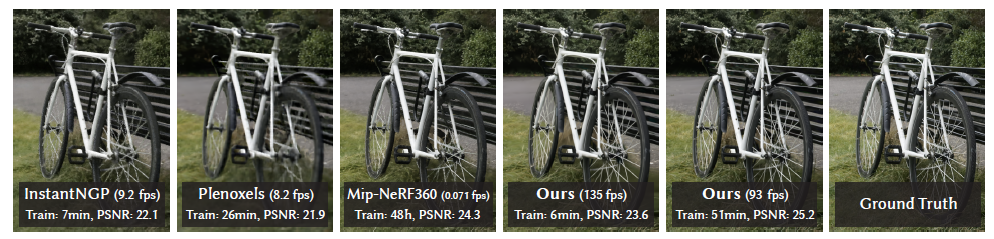
- 效果和 sota(Mip-NeRF 360,2022)差不多
- 训练时间和之前训练最快的算法差不多(InstantNGP,2022)(Plenoxels,2022)
- 关键:3D Gaussian scene representation coupled with a real-time differentiable renderer
- 之前没有算法能实现 1080p 实时渲染(>30fps)
- 3DGS 能实现的原因
- 初始是场景中的稀疏点,使用 3D Gaussian 表示场景,避免了场景中空白区域的无用计算
- 对 3D Gaussian 的优化、密度控制
- fast visibility-aware rendering algorithm(训练渲染都快了)
Introduction
3 个组件
- 引入 3D Gaussian 作为场景的表示
- 输入和 NeRF 类似:相机位姿(SfM 得到)
- 利用稀疏点云(可以伴随 SfM 生成)初始化 3D Gaussian 的位置
- 和其他方法不同,我们只需要 SfM 的点,不需要多视角的数据(Multi-View Stereo,MVS)
- 在 NeRF-synthetic dataset 中,随机初始化效果也很好
- 3D Gaussian 的好处:可微的体表示+快速光栅化(标准 \(\alpha\) 混合)
- 3D Gaussian 属性、数量的优化
- 实时的渲染算法(快速 GPU 排序)
Related Work
传统重建
- Traditional Scene Reconstruction and Rendering
- novel-view synthesis
- densely sampled
- unstructured capture
- Structure-from-Motion (SfM):在相机位姿矫正中生成稀疏点云
- re-project and blend the input images into the novel view camera and use the geometry to guide this re-projection
- 问题:当出现如下区域的时候,重建效果不好
- MVS 未重建的区域
- MVS 生成不一致的 mesh
Neural Rendering and Radiance Fields
- 早期工作使用 MVS-based geometry,效果一般
- 体表示
- Soft3D
- 基于连续可微的密度场 + ray marching
- NeRFs:引入重要性采样、位置编码
- 后续:加速、提高质量
- 加速
- 使用空间数据结构存储特征
- 不同输入编码:hash table、sparse voxel grid、SH 球谐函数
- MLP 大小:space discretization、codebooks
- 比较难处理空间大部分空白,很难有效表示
点渲染与辐射场
- Point-Based Rendering and Radiance Fields
- 可以有效渲染 disconnected and unstructured geometry samples(例如点云)
- 早期点云渲染:存在 alias,最明显的就是不连续性
- 用 API 实现固定大小的点渲染
- GPU 上的软光栅
- 一些开创性的工作,让点的大小超过一个像素(splatting)
- circular or elliptic discs, ellipsoids, or surfels
- 最近工作:differentiable point-based rendering
techniques
- 点上带特征,然后使用 CNN 渲染(CNN 引入时间上的不稳定性)
- 需要 MVS 提供的几何,继承了 MVS 的问题
- Point-based \(\alpha\)-blending and
NeRF-style volumetric rendering 的 formulation
- 样本的 density \(\sigma\)、transmission \(T\)、颜色 \(\mathrm{c}\)
- 沿着光线,和上一个样本的距离 \(\delta\)
\[ C=\sum_{i=1}^NT_i(1-\exp(-\sigma_i\delta_i))\mathbf{c}_i\quad\text{with}\quad T_i=\exp\left(-\sum_{j=1}^{i-1}\sigma_j\delta_j\right) \]
\[ C=\sum_{i=1}^{N}T_{i}\alpha_{i}\mathbf{c}_{i},\quad \text{with}\quad\alpha_{i}=(1-\exp(-\sigma_{i}\delta_{i}))\ \text{and}\ T_{i}=\prod_{j=1}^{i-1}(1-\alpha_{i}). \]
- neural point-based 方法
- \(\mathcal{N}\) 个排序的点
- \(\alpha\):每一个 2D Gaussian 的协方差 \(\Sigma\) 乘上每个点学习到的不透明度
- 和上面一样的模型,但是理论不同
- NeRF 隐式表示连续空间(需要高代价的随机采样点)
- 点是便是表示离散空间
- 3DGS 使用的就是下面这个式子
\[ C=\sum_{i\in\mathcal{N}}c_i\alpha_i\prod_{j=1}^{i-1}(1-\alpha_j) \]
- fast sphere rasterization:启发了我们的 tile-based 渲染算法
- specular effects
- Neural Point Catacaustics:使用 MLP 而不是 CNN,时间上稳定了,但还是需要 MVS 输出的几何
- 相关工作挺多的,之后再细看
Overview
- 输入为静态场景的多视角图片
- SfM 生成相机位姿,同时生成稀疏点云
- 通过稀疏点云初始化 3D Gaussian
- position (mean), covariance matrix and opacity \(\alpha\)
- 方向材质使用 SH
- 优化、渲染
- tile-based rasterizer

Differentiable 3DGS
- Differentiable 3D Gaussian Splatting
- 起点:SfM 输出的不带法向的稀疏点云
- 我们的方法和之前工作使用的 2D 点类似
- 稀疏点云估计法向很困难,粗糙的法向效果也并不好,于是我们使用不依赖于法向的 3D Gaussian
- 3DGS 定义(世界坐标)
- full 3D covariance matrix \(\Sigma\)
- 中心位置 mean \(\mu\)
\[ G(x) =\exp\left(-\frac{1}{2}(x)^T\Sigma^{-1}(x)\right) \]
- 如何从 3D 渲染到 2D:2001 年的 EWA Volume Splatting 算法
- 相机空间中的 covariance matrix \(\Sigma'\) 如下,推导见副录
- viewing transformation \(W\)
- \(J\):affine approximation of the projective transformation
- \(JW\):世界空间转换到相机屏幕空间
\[ \Sigma'=JW \Sigma W^TJ^T \]
- 一个优化方法:\(\Sigma\) 表示
radiance field
- 问题:\(\Sigma\) 只有半正定,才有物理意义
- 梯度下降的优化过程很难保证半正定
- 使用更加直接的方式进行
- 为什么没有平移?看副录的推导,和平移无关
- 3D 向量保存放缩分量、四元数 \(q\) 保存旋转分量(注意需要对 \(q\) 归一化)
\[ \Sigma=RSS^TR^T \]
- 让自动微分更快,我们显式求导:\(\dfrac{\partial{\Sigma}}{\partial{s,q}}\)
- 具体形式见副录
- 各向异性的协方差表示,能够很好的适应场景中不同的形状
Optimization
- Optimization With Adaptive Density Control of 3D Gaussians
- 优化
- \(p,\alpha,\Sigma\)
- SH 的系数(视角相关的现象)
- 3DGS 的密度
Optimization
- 生成的几何位置可能不准,需要实现如下的功能
- create、destroy、move geometry
- 3DGS 的质量很关键
- 因为可能存在这样的情况:一个高斯就表达了一整块同质(homogeneous)的区域
- SGD 优化(Stochastic Gradient Descent)
- fast rasterization 很重要(是优化的瓶颈)
- 激活函数
- \(\alpha\):sigmoid,将其限制到 \([0,1)\)
- \(\Sigma\) 的放缩分量:指数激活函数(类似原因是什么意思?)
1 | self.scaling_activation = torch.exp |
- 初始化
- \(\Sigma\) 初始化为各向同性的,轴等于到最近三个点的距离的平均值
- loss
- \(\lambda=0.2\)
\[ \mathcal{L}=(1-\lambda)\mathcal{L}_1+\lambda\mathcal{L}_\text{D-SSIM} \]
Adaptive Density Control
- Adaptive Control of Gaussians
- optimization warm-up
- 每经过 100 次迭代,对 GS 进行加密,去除透明 GS(\(\alpha<\epsilon_{\alpha}\))
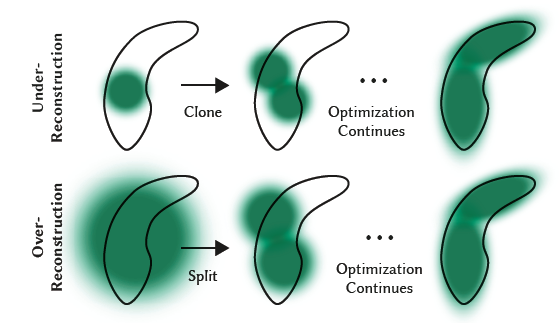
- 如下区域的 view-space positional 梯度都比较大(因为尚未重建好)
- regions with missing geometric features (“under-reconstruction”)
- Gaussians cover large areas in the scene(“over-reconstruction”),内部高方差
- 加密如上区域,如果 GS 的 view-space positional
梯度大于 \(\tau_{\text{pos}}=0.0002\),就加密
- under-reconstruction:复制一份 GS,往梯度方向平移
- 总体积增大、GS 数量增加
- over-reconstruction:分裂,scale 变成原来的 \(1/\phi=1/1.6\)(实验获得),位置通过将原来的
GS 作为采样 pdf 采样得到
- 总体积减小、GS 数量增加
- under-reconstruction:复制一份 GS,往梯度方向平移
- 问题:floaters close to the input cameras 的时候,优化出问题
- 导致 GS 数量激增
- 解决方案,每 \(N=3000\)
次迭代之后,将 \(\alpha\) 往 0 附近设置
- 这样如果 GS 是有用的话,会将 \(\alpha\) 优化变大;如果无用则会被剔除
- 我们周期性的去除很大的 GS
- very large in worldspace
- have a big footprint in viewspace
- GS 作为欧几里得空间中的原体,一直存在
Fast Differentiable Rasterizer
- Fast Differentiable Rasterizer For Gaussians
- 启发:软光栅(Pulsar,CVPR 2021)
- 将屏幕划分为 16x16 的 tile
- 根据视锥体(view frustum)对 GS 进行 culiing
- 只保留和视锥体相交的置信区间为 99% 的 GS
- guard band:直接剔除极端的 GS(靠近相机近平面的、视锥体外很远的),计算他们的 projected 2D covariance 不稳定
- 对每个 GS,对其覆盖到的每一个 tile 实例化一个 key(view space depth
and tile ID)
- 覆盖多个,则有多个 key
- key:一个 uint64,高位 tile ID,低位深度值
- 对 key 排序:single fast GPU Radix sort
- 只排一次,没有 per-pixel ordering
- \(\alpha\)-blending 可能会有 alias,但是当 splats 和像素大小相近时,基本上看不出来
- 大大加速了训练和渲染(在收敛的场景中没有明显可见的 artifacts)
- Radix sort 排序结束之后,tile ID 相同的就会被聚到一起(key
的设计保证了这一点)
- 每一个 tile 都能通过 first and last depth-sorted entry 获取到整个 GS 有序列表
- tile 内部共享这个列表
- 光栅化:forward pass
- 一个 tile 一个线程块(thread block),便于使用 shared memory 共享数据读取
- 利用 shared memory(16x16),一起读取 GS(front-to-back)
- 一次读取 16x16,循环读取
- 当 \(\alpha\)
累计到指定值的时候,该像素对应的线程停止计算
- T 小于一定值(0.0001),计算的式子
- 一些实现的细节,为了数值稳定(clamp \(\alpha<0.99\),\(\alpha<\epsilon=1/255\) 时忽略该 GS)
- 排序细节:副录C
- 光栅化中,T 作为唯一停止条件,不限制 GS 的个数
- backward pass
- 需要对所有的相关 GS 计算 loss
- 重新过一遍 list,这样不需要保存相关数据
- 之前:保存相关数据,将其保存在 global memory 中,需要处理动态长度的数据
- back-to-front:方便计算梯度
- 如计算的式子所示,我们还需要知道 T
- 只需要在 forward pass 的时候记录最终的 T\(=\prod_{j=1}(1-\alpha_j)\)
- 逆向遍历的时候除去后面的就行了
- 如计算的式子所示,我们还需要知道 T
结果
Implementation
- PyTorch 框架
- CUDA kernels for rasterization(前向渲染、反向计算 loss)
- NVIDIA CUB:基数排序
- open-source SIBR:interactive viewer
Optimization Details
- warm-up:为了训练的稳定性,先在小分辨率上进行训练(4x
smaller)
- 250、500 的时候分辨率 x2
- SH coefficient optimization
- 对角度信息敏感
- 如此效果才好:a central object is observed by photos taken in the entire hemisphere around it
- 一开始只优化 0 阶的,每 1000 个迭代轮增加 1 阶,直到 4 bands of SH 都被优化
Results and Evaluation
- 场景:13 real scenes
- published datasets
- synthetic Blender dataset
- an A6000 GPU
- Mip-NeRF360:4-GPU A100 node(等效相同时间,但是 A100 性能比 A6000 好)
- 对比算法:Mip-NeRF360(我们实现的)、InstantNGP、Plenoxels
- metric:PSNR, L-PIPS, and SSIM
- 3DGS
- 7K iterations(~5min)大部分场景,效果就不错了
- 30K iterations(~35min),有些场景需要久一点
- 自然数据上
- 我们训练时间和训练快的(InstantNGP)差不多
- 质量上和 sota 差不多(Mip-NeRF360)
- 而且能够实时渲染
- 合成数据集上,我们很容易 sota
- 视角多、相机准
- 即使随机初始化效果也很好
- 模型大小也比较小(~3.8MB)(和基于点的方法相比)
- 2 degree SH
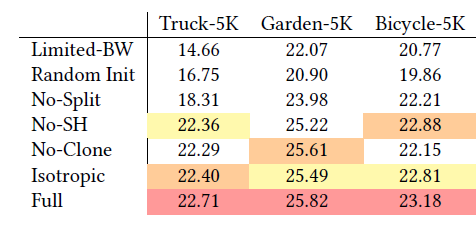
Ablations
- Initialization from SfM
- 没有的话我们效果也还不错,但是对于(缺乏训练视角的细节)或者(背景部分),可能会丢失细节
- Densification
- 分裂对背景至关重要
- 复制能加快收敛,尤其是一些细节部分(thin)
- Unlimited depth complexity of splats with gradients
- 只计算 top-N 重要的 GS(N=10):效果很差
- Anisotropic Covariance
- 只用一个半径,结果很糊
- Spherical Harmonics
Limitations
- In regions where the scene is not well observed we
have artifacts
- Gaussian 能缓解
- popping artifacts
- Gaussian 比较大的时候会出现
- 可能原因:trivial rejection(culling 方式不好)、简单的 visibility 排序
- 加正则化能缓解
- 大场景中使用 reducing the position learning rate,可能有效
- 目前都是一套参数
- 内存开销比 NeRF 类方法高
结论
- In conclusion, we have presented the first real-time rendering solution for radiance fields, with rendering quality that matches the best expensive previous methods, with training times competitive with the fastest existing solutions.
- python 部分占据了 80% 的时间(为了方便大家使用)
- cpp 优化会更快
副录
协方差关系
- 原始形式
\[ \mathcal{G}_{\mathrm{V}}(\mathrm{x}-\mathrm{p})=\frac{1}{2\pi\vert\mathrm{V}\vert^\frac{1}{2}}\exp\left({-\frac{1}{2}(\mathrm{x}-\mathrm{p})^{T}\mathrm{V}^{-1}(\mathrm{x}-\mathrm{p})}\right) \]
- 应用仿射变化 \(\mathrm{u}=\mathrm{M}\mathrm{x}+\mathrm{c}\)
\[ \mathcal{G}_{\mathrm{V}}(\Phi^{-1}(\mathrm{u})-\mathrm{p})=\frac{1}{\vert\mathrm{M}^{-1}\vert}\mathcal{G}_{\mathrm{MVM}^{T}}(\mathrm{u}-\Phi(\mathrm{p})). \]
- 对比上下两个式子,可以得到变换前后的协方差的关系
\[ \Sigma_{\text{before}}=\mathrm{V},\Sigma_{\text{after}}=\mathrm{MVM}^{T} \]
- 用到的只是简单的矩阵计算:\(\det(AB)=\det(A)\det(B),(AB)^{-1}=B^{-1}A^{-1},(AB)^{T}=B^{T}A^{T}\)
显式求导
- 看论文吧,大概思路就是链式法则,然后分步求导
\[ \dfrac{\partial{\Sigma'}}{\partial{s}}=\dfrac{\partial{\Sigma'}}{\partial{\Sigma}}\cdot\dfrac{\partial{\Sigma}}{\partial{s}} \]