(论文)[2022-ECCV] PRIF: Primary Ray-based Implicit Function
TLDR
- 任务:输入光线,输出交点位置
- 创新点:光线的编码
PRIF
- PRIF:Primary Ray-based Implicit Function
- 论文:作者网站
- 单位
 |
 |
|---|
Introduction
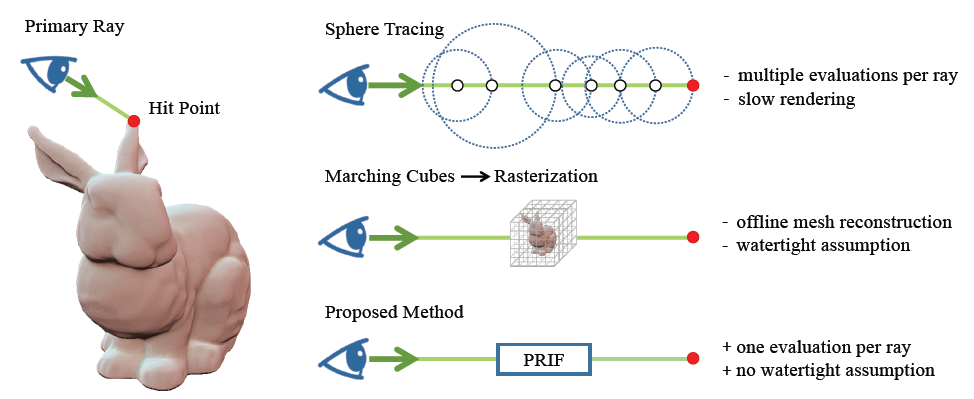
- SDF 对于渲染来说很不友好,如下两种方法都需要多次访问
SDF
- sphere tracing(ray marching)
- 通过 Marching Cubes 转化为 Mesh
- Mesh 受限于 mesh 算法(grid resolutions、shape watertightness)
- 论文工作:将 point-based 转化为 ray-based,只需要一次查询
- 光线:\(r=(\mathrm{p}_r,\mathrm{d}_r)\)
- \(\mathrm{p}_r\in\mathbb{R}^3,\mathrm{d}_{r}\in\mathrm{S}^2\)
- nontrivial formulation
- \((\mathrm{p}_r,\mathrm{d}_r)\to(\mathrm{p}_{hit},\mathrm{distance}_{hit})\) 效果不好
- 沿着方向 \(\mathrm{d}_r\) 移动原点 \(\mathrm{d}_r\),交点不变,只有距离变化
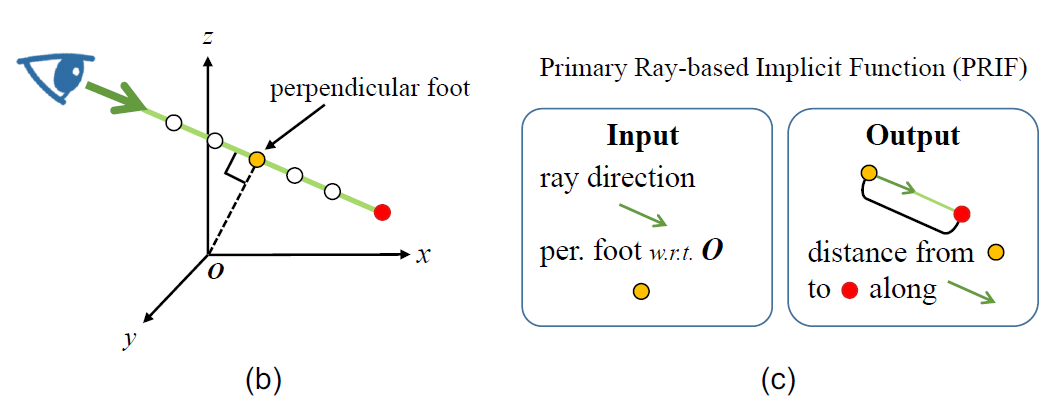
- 我们使用坐标原点到光线的垂足 \(\mathrm{f}_r\)
代替原点作为输出,这样原点移动,输入也不变化
- 可见性问题如何解决?
- 贡献
- 提出了 PRIF(最主要的贡献)
- PRIF 效果不错
- PRIF 有很多应用
Related Work
3D Shape Representations
Functional Representations
- 传统 3D shape 的表示
- polygon meshes, point clouds, and voxels.
- 神经网络:implicit neural representations (INRs)
- MLP 编码位置信息
- 输出
- OF:输出这个位置是否有东西
- occupancy function (OF)
- binary classification problem:1(有)0(无)0.5(是边界)
- SDF:输出到场景中最近 shape 的距离
- 表面:0
- OF:输出这个位置是否有东西
- 等值面(isosurface):continuous 3D function 的一个水平集(level
set)
- 如何提取出等值面:Marching Cubes 等 mesh 算法
Global vs Local Representations
- 如何从 INR 中提取数据
- 目的:rendering efficiency & representation quality
- 一个大的方向:spatial partitions
- Local Representations
- divides the surfaces of shapes into different local patches
- divides the 3D volume into small local regions
- 本文:Global
- a shape is represented by a single network without any spatial partitions.
- 之前的 Local 方法会对本文效果有提升
Ray-based Neural Networks
- 光场(light field scene)
- map camera rays to their observed colors:\((x,y,u,v)\to(r,g,b)\),可以实现高效+高保真的效果
- 2022-ICCV,SIGNET
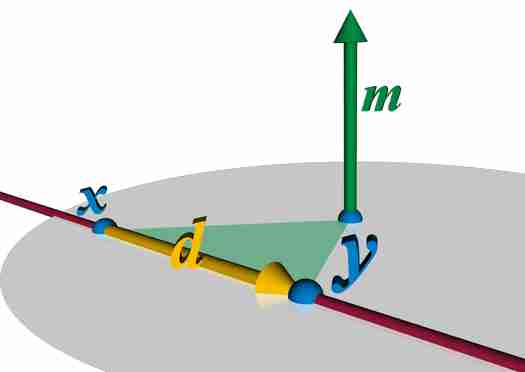
- Plucker coordinates 进行编码,实现任意起点、任意方向的光线
- 齐次坐标编码直线:\(d,m(=x\times y)\)
- map camera rays to their observed colors:\((x,y,u,v)\to(r,g,b)\),可以实现高效+高保真的效果
- 我们使用垂足表示,好处是这样表示后,输出变成了输入的仿射变换
Method
Background
- naive:\(r=(\mathrm{p}_r,\mathrm{d}_r)\to
c_r=(r,g,b)\)
- 效果不好,沿着 \(\mathrm{d}_r\) 前进一点得到的新光线 \(r'\) 的 \(c_{r'}=c_r\) ,但是网络很难保证这一点
- Plucker coordinates
- \(r=(\mathrm{m}_r,\mathrm{d}_r)\to
c_r=(r,g,b)\)
- \(\mathrm{m}_r=\mathrm{p}_r\times \mathrm{d}_r\):moment vector
- 不管 \(\mathrm{p}_r\)
在光线上怎么动,结果都相同
- 方向相同
- \(\mathrm{d}_r\) 不变(底不变),高不变,因此面积不变,大小不变
- \(\mathrm{p}_r'=\mathrm{p}_r-\lambda\mathrm{d}_r\)
- \(r=(\mathrm{m}_r,\mathrm{d}_r)\to
c_r=(r,g,b)\)
\[ \begin{aligned} \mathrm{p}_r'\times\mathrm{d}_r &=(\mathrm{p}_r-\lambda\mathrm{d}_r)\times \mathrm{d}_r\\ &=\mathrm{p}_r\times \mathrm{d}_r-\lambda\mathrm{d}_r\times \mathrm{d}_r\\ &=\mathrm{p}_r\times \mathrm{d}_r-\lambda\mathrm{0}\\ &=\mathrm{p}_r\times \mathrm{d}_r\\ \end{aligned} \]
Perpendicular Foot
- 垂足:\(\mathrm{f}_{r}=\mathrm{d}_r\times(\mathrm{p}_r\times
\mathrm{d}_r)\)
- 可以验证:\(\mathrm{f}_r\cdot \mathrm{d}_r=0\)
- 可以验证不变性
\[ \begin{aligned} \mathrm{f}_{r}' &=\mathrm{d}_r\times(\mathrm{p}_r'\times \mathrm{d}_r)\\ &=\mathrm{d}_r\times(\mathrm{p}_r\times \mathrm{d}_r)\\ &=\mathrm{f}_{r} \end{aligned} \]
- 此时对于交点 \(\mathrm{h}_r\),可以表示为 \(\mathrm{h}_r=s_r\cdot\mathrm{d}_r+\mathrm{f}_r\)
- \(s_r\in \mathbb{R}\)
- PRIF:\(r=(\mathrm{f}_r,\mathrm{d}_r)\to s_r\)
- 也就是我们训练一个 MLP
\[ \Phi(\mathrm{f}_r,\mathrm{d}_r)= s_r \]
- 优点:一次查询、仿射变化(输出 \(s_r\) 之后,一个仿射变化就能得到结果)
Background Mask
- 可能存在光线不打到物体(直接打空了)
- 我们让网络同时输出 \(a_r\in[0,1]\),表示击中物体的概率
- cross-entropy 计算 loss \(\mathcal{L}_a\)
- \(a_r\) 的真实值
- background rays:0
- foreground rays:1
- 总的 loss
- \(\mathcal{F}\):foreground rays
\[ \begin{aligned} \mathcal{L} &=\mathcal{L}_a+\mathcal{L}_s\\ &=\mathcal{L}_a+\left(\sum_{r\in\mathcal{F}}\Vert{s_r-s_r^{\text{gt}}}\Vert\right)\\ \end{aligned} \]
Outlier Points Removal
- 相邻光线之间的 sharp surface discontinuities 会导致网络输出问题(不连续性)
- 因此求导,丢弃导数比较大的部分
- 实验:\(\delta=5\)
\[ \left\Vert\dfrac{\partial{s_r}}{\partial{\mathrm{p}_r}}\right\Vert\ge\delta \]
Experiments
Single Shape Representation
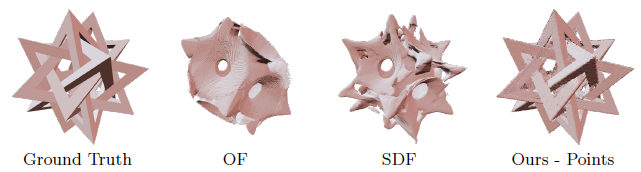
- 任务1:表示单个 shape,过拟合一个 mesh,看能不能表示的比较好
- 公平起见,使用相同的网络架构
- DeepSDF 的网络架构:8 layers with 512 hidden dimensions and ReLU activation
- 采样策略
- OF、SDF:采样500'000 个点,在表面附近采样更多的点
- PRIF:采样 50 个虚拟相机,每个相机采样 200x200 条光线
- 学习策略
- 100 epochs
- lr:cosine annealing strategy:\(10^{-4}\to10^{−7}\)
- 提取表面
- OF、SDF:Marching Cubes,分辨率 \(256^3\)
- PRIF:可以直接获取到稠密的点的结果
- 评估质量:评估 8192 个点之间的 mean and median Chamfer Distance (CD)
- OF、SDF:在 mesh 上采样 8192 个点
- PRIF:point-based meshing algorithm Screened Poisson in MeshLab,然后采样 8192 个点
Shape Generation
- 任务2:数据集中训练测试,测试没见过的物体的效果
- 这里的泛化性来自于 DeepSDF 的网络架构
Shape Denoising and Completion
- 在一组物体上训练好之后,然后在没见过的物体上执行降噪或者补全
Analysis and Ablations
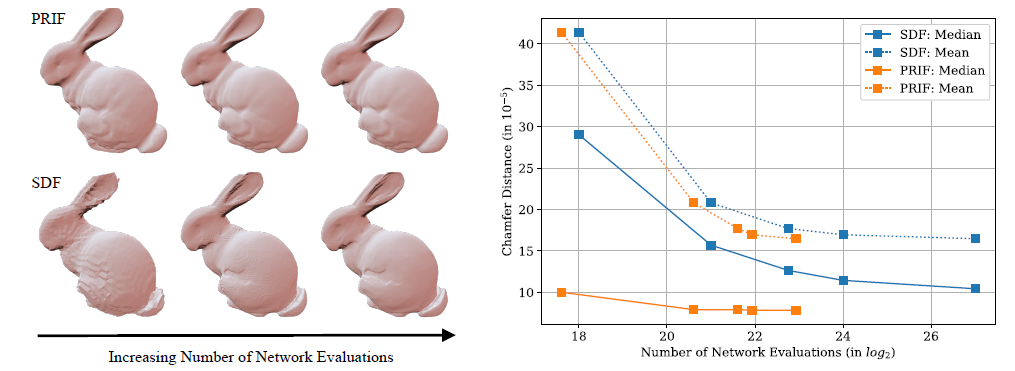
Complexity Analysis
- 相当于评估网络本身能学习到的东西有多少
- SDF、OF:调整 Marching Cube 的分辨率,对比结果
- PRIF:调整 Screened Poisson 算法中使用的相机个数与分辨率
Stress Testing
- 复杂模型:self-intersecting and non-watertight shape
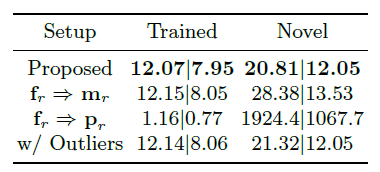
Ablations
- w/o outlier removal
- 指标差不多,但是会存在游离的噪点(散点)
- \(r=(\mathrm{f}_r,\mathrm{d}_r)\)、\(r=(\mathrm{p}_r,\mathrm{d}_r)\)、\(r=(\mathrm{m}_r,\mathrm{d}_r)\)
Further Applications
- Learning Camera Poses:固定网络,逆向学习相机参数
- Neural Rendering with Color:讯号 PIRF 网络之后,再训练一个 \(\text{pos}\to\text{color}\) 的网络输出颜色
局限性
- 多视角问题:需要 multi-view consistency loss or denser training views
- 我不太理解,难道可见性问题不重要吗,好神奇,还是说单物体体现不出来,训练时间也没说
- 感觉只是学到了最外层的点?