(论文)[2023-SIGC] Neural Parametric Mixtures for Path Guiding
NPM
- Neural Parametric Mixtures for Path Guiding
- SIGGRAPH 2022
- 主页
摘要
- NPM:神经网络隐式表示 PG 使用的 pdf
introduction
- 之前的 PG 方法一般不能很好的构建 spatial-directional 之间的相关性
- 离散化的问题
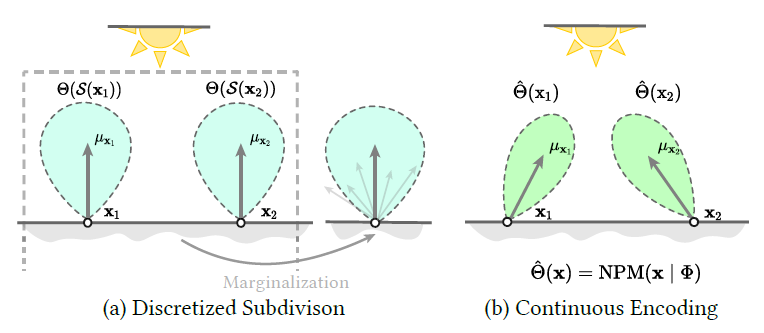
- 之前的方法,需要大量训练得到 spatial/directional 合适的细分程度
- NPM
- 一个方便学习 + 采样的分布,快速学习(SGD 就行),lightweight MLP
- 连续建模
- GPU
- 可以直接学习 BSDF x L 的结果
related work
- Path Guiding
- Parametric Mixture Models
- 比较好的特性
- closed-form solutions for products, convolutions and integrals
- 采样快
- Gaussian mixtures
- von Mises-Fisher mixtures
- 比较好的特性
- Implicit Neural Representation
- NeRF
preliminary
- 渲染方程:\(\omega_o\) 表示 camera rays 的方向

- \(N=1\) 样本 MC 无偏估计

- Von Mises-Fisher(vMF)
- 方向:\(\mu\in\mathbb{S}^2\)
- sharpness:\(\kappa\in[0,+\infty]\)
\[ v(\omega\mid\mu,\kappa)=\dfrac{\kappa}{4\pi\sinh\kappa}\exp\left(\kappa\mu^{T}\omega\right) \]
- VMM 是 vMF 的加权混合(\(\lambda_i\))
\[ \mathcal{V}(\omega\mid\Theta)=\sum_{i=1}^{K}\lambda_i\cdot v_i(\omega\mid\mu_i,\kappa_i) \]
- VMM 的优势
- fewer parameters (4 floats per component)
- efficient importance sampling
- closed-form product and integration
NPM
- pipeline

Radiance-based NPM
- NPM 想要实现的目标
\[ \mathcal{V}(\omega_i\mid\Theta(\mathrm{x}))\propto L_{\text{i}}(\mathrm{x},\omega_i) \]
- NPM 将输入解码成 VMM 的参数 \(\hat{\Theta}(\mathrm{x})\),用于采样
- \(\Phi\) 表示 MLP 中待学习的参数
\[ \text{NPM}_{\text{radiance}}(\mathrm{x}\mid\Phi)=\hat{\Theta}(\mathrm{x}) \]
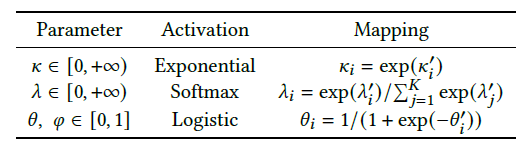
- 为了保证网络输出的参数满足 vMF 的要求,对网络输出做一个映射
- 加了激活函数
\[ \lambda_i,\kappa_i>0,\mu_i\in\mathbb{S}^2,\sum_{i=1}^{K}\lambda_i=1 \]
- 网络:最直观的方式就是直接使用 MLP:\(\mathrm{x}\to\hat{\Theta}\)
- 一个简单的神经网络无法模拟高频信息,因此 NPM 加上了一个 trainable multi-resolution spatial embedding
Optimizing NPM
- SGD
- \(\Theta_{\text{gt}}(\mathrm{x})\) 是未知的
- 之前的算法:EM(不适用于隐式的方法)
- 将真实分布 \(\mathcal{D}\) 和我们学习的分布 \(\mathcal{V}\) 之间的 KL 散度作为 loss
- 给定位置 \(\mathrm{x}\),loss 如下

- 在 radiance-based PG 中,\(\mathcal{D}\propto L_i\)
- 在实际实现中,我们直接使用 \(L_i\)
- 使用 \(k\mathcal{D}\) 还是 \(\mathcal{D}\) 不影响最值
- loss 没法直接得到,使用 MC 估计
- \(N\) samples
- \(\tilde{p}\):采样分布,我们使用 BSDF 和 VMM 的 MIS
 \[
D_{\text{KL}}(\mathcal{D}\|\mathcal{V};\Theta)\approx\dfrac{1}{N}\sum_{j=1}^{N}\dfrac{\mathcal{D}(\omega_j)}{\text{sg}\left(\tilde{p}(\omega_j\mid\hat{\Theta})\right)}\log\dfrac{\mathcal{D}(\omega_j)}{\mathcal{V}(\omega_j\mid\hat{\Theta})}
\]
\[
D_{\text{KL}}(\mathcal{D}\|\mathcal{V};\Theta)\approx\dfrac{1}{N}\sum_{j=1}^{N}\dfrac{\mathcal{D}(\omega_j)}{\text{sg}\left(\tilde{p}(\omega_j\mid\hat{\Theta})\right)}\log\dfrac{\mathcal{D}(\omega_j)}{\mathcal{V}(\omega_j\mid\hat{\Theta})}
\]
- 在计算的时候,可以把 loss 中的常数部分去掉【不产生梯度,论文实现就是这样】
\[ D_{\text{KL}}(\mathcal{D}\|\mathcal{V};\Theta)\approx-\dfrac{1}{N}\sum_{j=1}^{N}\dfrac{\mathcal{D}(\omega_j)}{\text{sg}\left(\tilde{p}(\omega_j\mid\hat{\Theta})\right)}\log\mathcal{V}(\omega_j\mid\hat{\Theta}) \]
- loss 到参数的梯度(用于训练)如下
- 另外可以过滤 \(\mathcal{D}=0\) 的样本,也不产生出梯度,大大提高训练速度

- 实际训练对:\((\mathrm{x},\omega_i)\to L_i\) 分布在不同的空间位置,需要在每个位置都收敛
- 我们希望得到的最优 \(\Phi\),满足

- adaptive training:梯度最大的地方,loss 最大(占主导)
Full Integrand Learning
- 需要考虑 \(\omega_o\),对于神经网络来说很自然,能够表示就能够学习
\[ \text{NPM}_{\text{product}}(\mathrm{x},\omega_o\mid\Phi)=\hat{\Theta}(\mathrm{x},\omega_o) \]
- 想要训练的目标变成
\[ \mathcal{V}(\omega_i\mid\hat{\Theta}(\mathrm{x},\omega_o))\propto f_{\text{s}}(\mathrm{x},\omega_o,\omega_i)L_{\text{i}}(\mathrm{x},\omega_i)\left\vert\cos\theta_i\right\vert \]
- 其中 \(\cos\) 可以使用一个 constant vMF 来表示
其他
- Auxiliary Feature Inputs(去掉效果掉的不多)
- surface normal \(\mathrm{n}(\mathrm{x})\) and roughness
- Input Encoding
- 模拟 non-linearity between multidimensional inputs and outputs
- trainable multi-resolution spatial embedding
- 和 NRC 一样
- \(\omega_{\text{o}},\mathrm{n}(\mathrm{x})\):spherical
harmonics
- NeRF
- 模拟 non-linearity between multidimensional inputs and outputs
实现
Multi-resolution Spatial Embedding
- 映射:\(\mathrm{x}\to\hat{\Theta}\)(radiance-based
version)
- \(\mathbb{R}^3\to\mathbb{R}^{4\times K}\)
- 直接使用 MLP,很难建模空间上的高频变化
- 使用可学习的多分辨率的空间编码
- \(L\) 个 3D 均匀网格 \(G_1,\cdots,G_l,\cdots G_L\)
- 每一个都覆盖整个空间
- 每一个的空间分辨率为 \(D_l^3\)(成倍增加)
- 每一个网格位置定义一个 latent feature vector \(v\in \mathbb{R}^{f}\)
- 非格点位置,线性插值

- \(V_l[\mathrm{x}]\):对应的用于插值的 8 个位置的 latent vector
- radiance-based NPM 现在变成如下形式
- \(\Phi_{\text{E}}\):spatial embedding
- \(\Phi_{\text{M}}\):MLP
\[ \text{NPM}_{\text{radiance}}\left(G(\mathrm{x}\mid\Phi_{\text{E}})\mid\Phi_{\text{M}}\right)=\hat{\Theta}(\mathrm{x}) \]
Online Training Scheme
- Optix + GPU,wavefront
- structure-of-arrays (SoA) memory layout
- Training Scheme
- 边训练,边渲染
- 固定比例的 budget(spp/time) 用于渲染
- 实验:\(25\%\)
- NPM 在 150spp(15s,1000 training step)便能够收敛
Guiding Network
- tiny-cuda-nn
- MLP
- 3 linear layers of width 64
- ReLU activation(最后一层使用表格中的激活函数)
- VMM:8 vMF(\(K=8\))
- Grid Embembbing:\(L=8\)
- increasing resolutions:\(D_1=8,D_8=68\)
- feature:\(F=4\) floats
- training
- \(\text{lr}=0.005\)
- Adaptive momentum techniques(Adam)
- vMF 采样
- inference
- EMA(NRC 相似)
结果讨论
- RTX3070
- 不开 NEE、RR,最大深度 10
- 720p
- metric:relMSE、MAPE、MRSE
- MIS:(fixed)50% BSDF + 50% Method
对比
- 在训练早期,结果就已经比较好了
- 黄色的是 PT
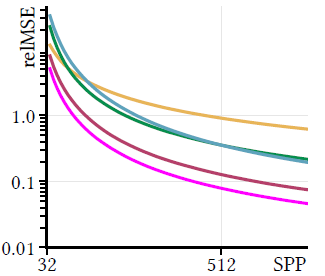

- 和 Rath 的 VAPG 相比,又快又好
- 和 PPG 相比,平均有 1.5x 的加速
Evaluation
- Trainable Spatial Embedding
- No Encoding ~ Frequency < Single-Resolution < Multi-Resolution
- Training Efficiency
- 少量样本的时候,效果就已经比较好了(> VAPG)
Discussion
- Path Guiding Extensions
- 学习 MIS 的采样概率(论文固定 50%)
- VAPG 中的理论:学 \(L_i^2\)
- Performance Analysis
- 720p 过一遍网络:3ms
- training step(\(2^{18}\) samples):10ms
- 2M params:<10 MB 内存
- Alternative Solutions
- 其他方法复杂,不适合 GPU
Future
- 更好的基函数
- VMM 数量固定,表达不够准确