(论文)[1997-EGSR] An Error Metric for Monte Carlo Ray Tracing
An Error Metric for Monte Carlo Ray Tracing
- Mark R. Bolin Gary W. Meyer
Introduction
- 提出了一种标准,用于衡量蒙特卡洛光线追踪的误差
- visual system 中的误差(传输、显示)
- 量化误差,压缩算法带来的误差
- 噪声
- 因此考虑到效率的因素,我们需要知道误差界,从而更好的选择 spp 数
Previous work
- Kajiya [1986]:The Rendering Equation
- 渲染方程
- ray trees 是低效的,大部分贡献不高
- 提出了 path tracing 的框架
- Kirk [1990-SIG]:Particle Transport and Image Synthesis
- Russian Roulette:当权重小于一个阈值时使用
- Splitting:未给出使用的指导
- Arvo [1994]:A Framework for the Analysis of Error in Global
Illumination Algorithms
- 误差评估,主要集中在辐射度算法
- Lee [1985]:Statistically Optimized Sampling for Distributed Ray
Tracing
- 在 image plane 中分析,在给定阈值下,需要多少 spp 数
- TODO
Error of Monte Carlo simulations
1个交点一条光线
- MC 估计

- 函数的方差(函数本身性质,和样本数无关)
\[ V\left[f\right]=E\left[f^2\right]-E^2\left[f\right] \]
- MC 估计的方差
- 两个方差的区别,详细看这里
\[ V\left[\bar{f}\right]=\dfrac{V\left[f\right]}{N_0} \]
- 此时,如果期望准确率 \(V_d\left[\bar{f}\right]\),函数方差 \(V\left[f\right]\),则需要的样本数 \(N_0\)
\[ N_0=\dfrac{V\left[f\right]}{V\left[\bar{f}\right]} \]
1个交点多条光线
条件期望公式
- 重期望公式
\[ E[X]=E_Y[E_X[X\mid Y]] \]
- 条件期望公式
\[ \begin{aligned} V[X] &=V[E[X\mid Y]]+E[V[X\mid Y]]\\ &=V_Y[E_X[X\mid Y]]+E_Y[V_X[X\mid Y]] \end{aligned} \]
- 推导
\[ \begin{aligned} V_X[X\mid Y] &=E_X\left[[X-E[X]]^2\mid Y\right]\\ &=E_X\left[X^2\mid Y\right]-E_X^2[X\mid Y] \end{aligned} \]
\[ \begin{aligned} V_Y[E_X[X\mid Y]] &=E_Y\left[\left(E_X[X\mid Y]-E_X[X\mid Y]\right)^2\right]\\ &=E_Y\left[E_X^2[X\mid Y]\right]-E_Y^2\left[E_X[X\mid Y]\right]\\ &=E_Y\left[E_X^2[X\mid Y]\right]-E^2[X]\\ \end{aligned} \]
\[ \begin{aligned} E_Y[V_X[X\mid Y]] &=E_Y\left[E_X\left[X^2\mid Y\right]-E_X^2[X\mid Y]\right]\\ &=E_Y\left[E_X\left[X^2\mid Y\right]\right]-E_Y\left[E_X^2[X\mid Y]\right]\\ &=E[X^2]-E_Y\left[E_X^2[X\mid Y]\right]\\ \end{aligned} \]
- 于是有
\[ \begin{aligned} V_Y[E_X[X\mid Y]]+E_Y[V_X[X\mid Y]] &=E[X^2]-E^2[X]\\ &=V[X]\\ \end{aligned} \]
ray tree
- 根据 level 展开,得到如下式子

- 递归展开

- 递归示例
\[ \begin{aligned} V[f] &=V[E[f\mid x_0]]+{\color{red}E[V[f\mid x_0]]}\\ &=V[E[f\mid x_0]]+E\Big[V[E[f\mid x_0x_1]\mid x_0]+E[V[f\mid x_0x_1]\mid x_0]\Big]\\ &=V[E[f\mid x_0]]+E[V[E[f\mid x_0x_1]\mid x_0]]+E[E[V[f\mid x_0x_1]\mid x_0]]\\ &=V[E[f\mid x_0]]+E[V[E[f\mid x_0x_1]\mid x_0]]+E[V[f\mid x_0x_1]\mid x_0x_1]\\ &=VE[f\mid x_0]+EV[E[[f\mid x_0x_1]\mid x_0]]+{\color{red}EV[f\mid x_0x_1]}\\ &=\cdots \end{aligned} \]
- 每次展开,多一项,即每一个 ray tree
节点引入的方差
- 也就是说,全局的方差就来自于每一个 ray tree 节点引入的方差
\[ EV[E[[f\mid x_0\cdots x_L]\mid x_0\cdots x_{L-1}]] \]
Splitting
- ray tree 中每一个节点分裂不止一条光线
- 例如:\(x_0\) 出采样多个出射方向(多个 \(x_1\) )

- 方差

- 和式子 5 相比,方差减小如下
 \[
\begin{aligned}
V[f_\text{S}]
&=VE[f_\text{S}\mid x_0]+EV[f_\text{S}\mid x_0]\\
&=VE[f\mid x_0]+\dfrac{1}{N_1}EV[f\mid x_{0}]\\
&=V[f]+\dfrac{1-N_1}{N_1}EV[f\mid x_{0}]
\end{aligned}
\]
\[
\begin{aligned}
V[f_\text{S}]
&=VE[f_\text{S}\mid x_0]+EV[f_\text{S}\mid x_0]\\
&=VE[f\mid x_0]+\dfrac{1}{N_1}EV[f\mid x_{0}]\\
&=V[f]+\dfrac{1-N_1}{N_1}EV[f\mid x_{0}]
\end{aligned}
\]
- 但是因为增加了额外的计算开销(发射额外的光线),因此只有 \(EV\) 项比 \(VE\) 项大时效果才比较好
Russian Roulette
- 提前终止不重要的光线

- 期望
- 式子中的 \(f\equiv f\mid x_0,f_{RR}\equiv f_{RR}\mid x_0\)
\[ E[f_{RR}]=P_1E\left[\dfrac{f}{P_1}\right]+(1-P_1)\cdot0=E[f] \]
- 方差如下

- 推导如下
- 式子中的 \(f\equiv f\mid x_0,f_{RR}\equiv f_{RR}\mid x_0\)
\[ \begin{aligned} V[f_{RR}] &=P_1E\left[\dfrac{f}{P_1}-E[f_{RR}]\right]^2+(1-P_1)E\Big[0-E[f_{RR}]\Big]^2\\ &=\dfrac{1}{P_1}E\Big[f-P_1E[f]\Big]^2+(1-P_1)E^2[f]\\ &=\dfrac{1}{P_1}\Big(E[f^2]+(P_1^2-2P_1)E^2[f]\Big)+(1-P_1)E^2[f]\\ &=\dfrac{1}{P_1}\Big(E[f^2]-E^2[f]+(1+P_1^2-2P_1)E^2[f]\Big)+(1-P_1)E^2[f]\\ &=\dfrac{1}{P_1}V[f]+\dfrac{(1-P_1)P_1+(1-P_1)^2}{P_1}E^2[f]\\ (结果)&=\dfrac{1}{P_1}V[f]+\dfrac{(1-P_1)}{P_1}E^2[f]\\ &=\dfrac{1}{P_1}\left(V[f]+E^2[f]\right)-E^2[f]\\ &=\dfrac{1}{P_1}E[f^2]-E^2[f]\\ &=\dfrac{1-P_1}{P_1}E[f^2]+V[f]\\ \end{aligned} \]
- 和式子 5 相比,方差增大如下
- RR 必然增大方差
 \[
\begin{aligned}
V[f_\text{RR}]
&=VE[f_\text{RR}\mid x_0]+EV[f_\text{RR}\mid x_0]\\
&=VE[f\mid x_0]+EV[f\mid x_0]+\dfrac{1-P_1}{P_1}\left(EV[f\mid
x_0]+E[E^2[f\mid x_0]]\right)\\
&=VE[f\mid x_0]+EV[f\mid x_0]+\dfrac{1-P_1}{P_1}\left(EE[f^2\mid
x_0]\right)\\
&=V[f]+\dfrac{1-P_1}{P_1}\left(EE[f^2\mid x_0]\right)
\end{aligned}
\]
\[
\begin{aligned}
V[f_\text{RR}]
&=VE[f_\text{RR}\mid x_0]+EV[f_\text{RR}\mid x_0]\\
&=VE[f\mid x_0]+EV[f\mid x_0]+\dfrac{1-P_1}{P_1}\left(EV[f\mid
x_0]+E[E^2[f\mid x_0]]\right)\\
&=VE[f\mid x_0]+EV[f\mid x_0]+\dfrac{1-P_1}{P_1}\left(EE[f^2\mid
x_0]\right)\\
&=V[f]+\dfrac{1-P_1}{P_1}\left(EE[f^2\mid x_0]\right)
\end{aligned}
\]
- 但是因为减少计算开销(发射的光线变少了),因此只有 \(EV\) 项和 \(EE\) 项比 \(VE\) 项小时效果才比较好
一般情况
- RR+S
- S 比较简单,直接除以数量即可
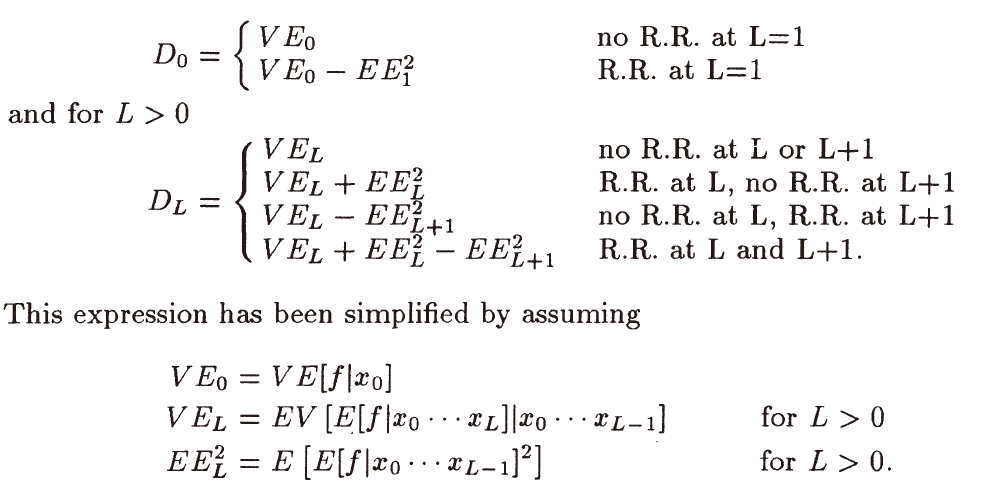
- RR 比较复杂,分类讨论
- 方差,综合式子 \((5)(8)(11)\)
- \(N_L\):RR概率 / 分裂数目

- \(D_L\)
Optimum splitting and Russian Roulette
- 之前的工作:ad-hoc(scene-specific)
- RR:N bounce && weight 降低到一定值之后
- S:固定设置为 1(PT) or N
- quality
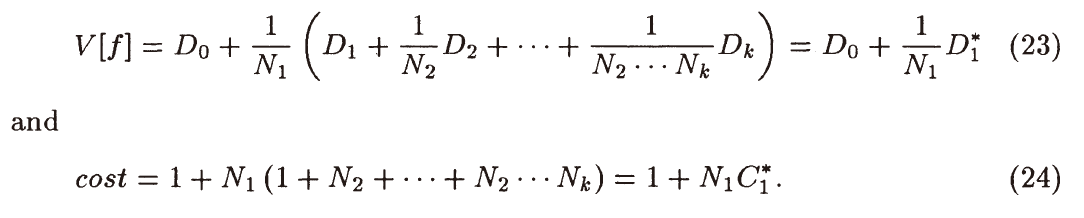
\[ Q=cost\times V[f] \]
- 通过光线数目来衡量,cost 可以被表示为

- 求解最优的 \(N_L\):\(\dfrac{\partial Q}{\partial N_L}=0\)
\[ N_L=\sqrt{\dfrac{D_L}{D_{L-1}}}\quad\quad(16) \]
证明
- 把无关项写到一起
- 最小化 \(Q\)

- 代回 \(Q\)

- 此时 \(C_1^{\ast}Q_1^{\ast}\)
最小,则 \(Q\) 最小
- 同理需要 \(C_L^{\ast}Q_L^{\ast}\) 最小
- 根据 \((25)(23)\) 得到
\[ D_0=\dfrac{V[f]}{cost} \]
- 此时观察 \((23)(24)\),可以得到 \((16)\) 的结果
\[ N_L=\sqrt{\dfrac{D_L}{D_{L-1}}} \]
- \(L=1\) 显然, \(L>1\) 类似的方法推导即可
使用
- 最优的 \(N_L\) 不好应用,因为 \(D_{L-1}/D_L\) 依赖于 \(\text{level}=L-1,L+1\) 是否 RR
- \(L+1\) 未知,这个本身就是我们计算的问题(循环依赖)
- trick:假设成立,验证是否可行,可行则继续,不可行则回退
- \(\text{level}=1\) 开始
- 每一个 level,我们都假设在 \(L,L+1\) 都使用 RR
- 如果计算得到的 \(N_L<1\),则进入 \(L+1\)(可能符合我们的假设)
- 如果 \(N_L\ge1\),和假设不符,此时
\(L\) 不使用 RR(与预期不符),回退
\(L-1\),重新计算最优的 \(N_{L-1}\)
- 如果 \(N_{L-1}\) 之前 \(<1\),现在 \(\ge1\),还需要继续回退
- 否则进入 \(L\),重新计算 \(N_L\)
Terminations
- 提前结束:击中光源、打空
- 很常见
- 考虑提前终止的影响
- \(L-1\) 停止的光线不会影响 \(L\) 的方差,因此只有到达 \(L\) 的占比 \(R_L\) (到达 \(L\))的光线会带来方差
- 因此有
- \(EV\) 只考虑能够到达 \(1\) 的光线

- \(R\) 这一项的含义:所有的方差分析建立在能够到达 \(L\) 的光线
- 推导:\(t\) 表示停止,\(c\) 表示继续
\[ \begin{aligned} V[f]&\\ (分段积分)&=V_{t}[f]+V_{c}[f]\\ &=V_tE[f\mid x_0]+E_tV[f\mid x_0]+V_cE[f\mid x_0]+E_cV[f\mid x_0]\\ &=V_tE[f\mid x_0]+0+V_cE[f\mid x_0]+E_cV[f\mid x_0]\\ &=V_tE[f\mid x_0]+V_cE[f\mid x_0]+E_cV[f\mid x_0]\\ &=VE[f\mid x_0]+E_cV[f\mid x_0]\\ \end{aligned} \]
- 更新 RR、S
- 综合式子 \((8)(11)(17)\)
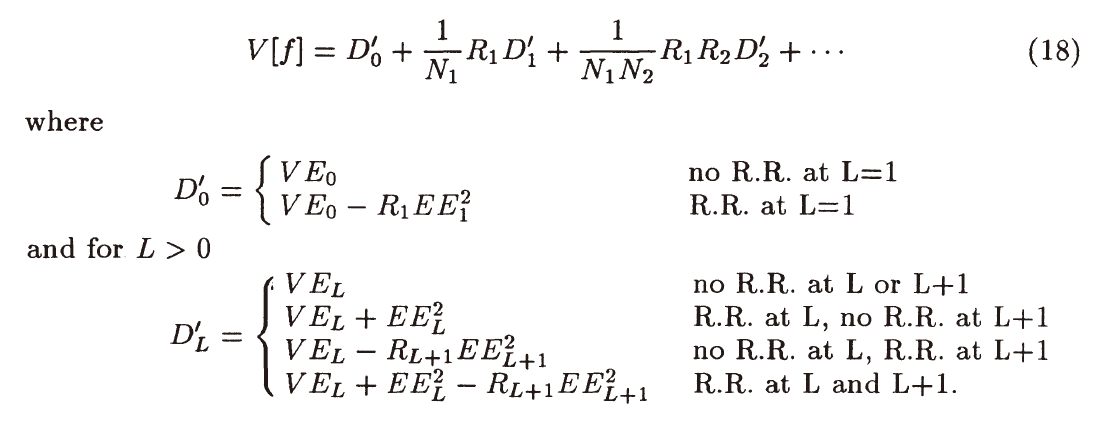
- 这里的 \(VE_L,EE_L^2\) 只计算到达 \(L\) 的光线
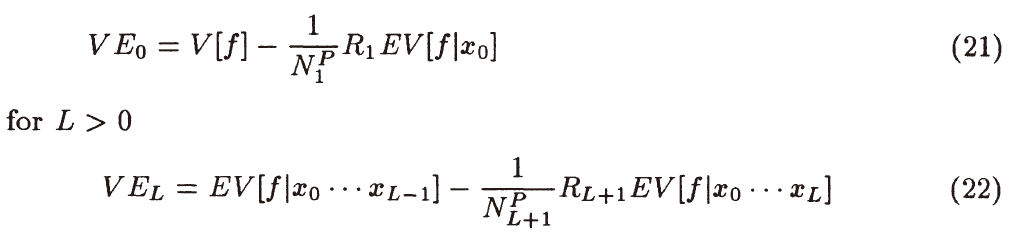
- cost 更新

- 最优结果
- 分母重用之前的表达,但是只考虑能够到达 \(L\) 的光线

Implementation
- 实现上为了计算 \(D\),需要预先采样样本计算一些期望和方差
- 算法思路
- 预先采样 pilot samples,估计 \(D\) 以及 \(N_L\)
- image plane 的防擦好被计算得到
- 根据要求的精度,为每一个像素计算 spp
- 输入
- pilot sampling rate
- target variance within the image plane
- 为了估计方差,在每一个交点都需要发射若干光线
- 实现上,随着深度增加可以减少样本数
- 计算顺序
- 每一个 level 都能采样,此时能够计算
- \(V[f]\):像素
- \(V[f\mid x_0\cdots x_{L-1}],E^2[f\mid x_0\cdots x_{L-1}]\):level \(L\)
- 根据上面的值计算 \(E\big[V[f\mid x_0\cdots x_{L-1}]\big],E\big[E^2[f\mid x_0\cdots x_{L-1}]\big]\)
- 同时可以光线数目估计 \(R_L\)
- 都算完了,根据式子 9,计算 \(VE\) 项
- 每一个 level 都能采样,此时能够计算
- 最后可以估计 \(N_L\) 了
- 这个方法计算代价很高,因为需要大量的 pilot samples