(论文)[2021-CGF]Path Guiding Using Spatio-Directional Mixture Models
SDMM
- Path Guiding Using Spatio-Directional Mixture Models
- CGF-2021
- code
概述
- SDMM:spatio-directional Gaussian mixture models
- 表示方法:GMM
- incident radiance (\(L_i\)) using a 5D Gaussian mixture model
- BSDFs ( fs) using \(n\)D Gaussian mixture models
- 好处
- 自然捕获 \(L_i\) 中的 spatio-directional correlation(e.g. 视差 parallax)
- \(n\)D mixtures models 可以很好的表示参数化的 BSDF
挑战
坐标系
- product sampling:需要两个 GMM 在同一个坐标系中表示
- shading frame:表面法向始终是 \((0,0,1)\)
- 我们的 5D GMM 是在世界坐标中表示的(不能用 shading frame)
- global coordinate frame
- 将 GMM 转化到 shading frame 中
- 有形变(distortion),GMM 的中心位置
- 尝试解决形变问题
- tangent-space parameterization
- first-order Taylor approximation
- product sampling:需要两个 GMM 在同一个坐标系中表示
条件概率:\(p(\mathrm{\omega}_i\vert \mathrm{x}_i)\)
- 非线性、很难训练
- 只在每一次采样决策时,优化我们的 GMM
- ?TODO
kD-tree 加速结构,用于训练 GMM
相关工作
- path guiding
- reinforcement-learning-style iterated rendering
- Learning Light Transport the Reinforced Way【sig17-talk】
- ppg【EGSR-2017】
- 拆分空间实现 spatio-directional correlations
- 早期
- primary sample space
- Learning to Importance Sample in Primary Sample Space【2019】
- Primary Sample Space Path Guiding【2018】
- path space approaches
- Selective Guided Sampling with Complete Light Transport
Paths【2018】
- 高斯表示整个 path
- Selective Guided Sampling with Complete Light Transport
Paths【2018】
- reprojection-based techniques(有前置假设)
- Robust Fitting of Parallax-Aware Mixtures for Path Guiding【2020】
- neural networks:5D、7D
- Neural Importance Sampling【2019】
- Neural Control Variates【2020】
- reinforcement-learning-style iterated rendering
- mixtures models
- GMM
- mixtures of von Mises-Fisher distributions
- domain:solid sphere \(\mathbb{S}^{2}\) rather than Euclidean space(各向同性)
- 论文
- Volume Path Guiding Based on Zero-Variance Random Walk Theory【2018】
- Robust Fitting of Parallax-Aware Mixtures for Path Guiding【2020】
方法论
- 目标
- \(\phi(x)\):BSDF 的参数表示
\[ p(\omega_i\vert\omega_o,x_i)\propto L_i(\omega_i,x_i)f_s(\omega_i,\omega_o,\phi(x))\cos(\gamma) \]
- 方法论
\[ p_{L_i}(\omega_i,x)\propto L_i(\omega_i,x) \]
\[ p_{f_s}(\omega_i,\omega_o,\phi)\propto f_s(\omega_i,\omega_o,\phi(x))\cos(\gamma) \]
- 实际采样
\[ p(\omega_i\vert\omega_o,x)\propto p_{L_i}(\omega_i\vert x)p_{f_s}(\omega_i\vert \omega_o,\phi(x)) \]
切线空间 GMM
- spherical tangent-space Gaussian mixture models
- rotate the mixtures to the same coordinate frame
- 表示
- \(\mu_k\in\mathbb{S}^2\):world-space unit-length mean vector
- \(\sum_k\in\mathbb{R}^{2\times2}\):tangent-space covariance matrix
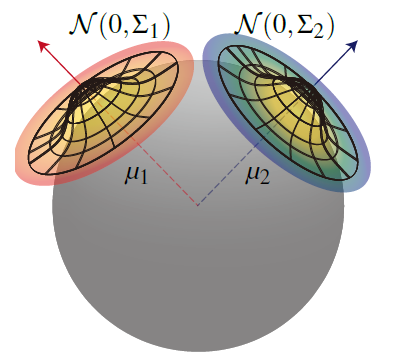
- 旋转只需要旋转 \(\mu_k\) 即可
- 在 \(\mu\) 处的切线空间(\(\mu\)-centered tangent space)
- \(\omega\in\mathbb{S}^2\):world-space directions
- \(v\in\{v\vert\Vert{v}\Vert<\pi\}\):tangent-space directions
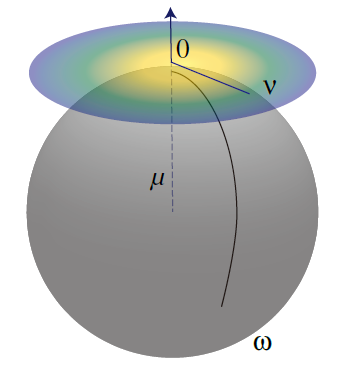
- exp/log 变换
\[ v=\log_{\mu}(\omega),w=\exp_{\omega}(v) \]
- azimuthal equidistant projection
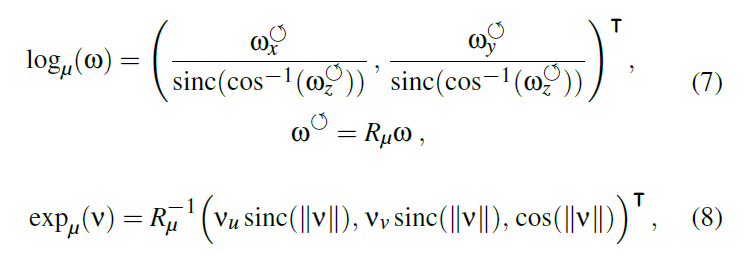
- 其中
- \(R_{\mu}\):旋转矩阵,\(\mu\to(0,0,1)\)
\[ \text{sinc}(x)=\dfrac{\sin(\pi x)}{\pi x},unnormalized \]
- 该变换的优点:\(\Vert{v}\Vert<\pi\)
- 变换前后,从原点(\(\mu\),\(\mu\) 对应到 tangent space 中的点)到这个点的测地线距离不变
- \(\mu\)-centered tangent space

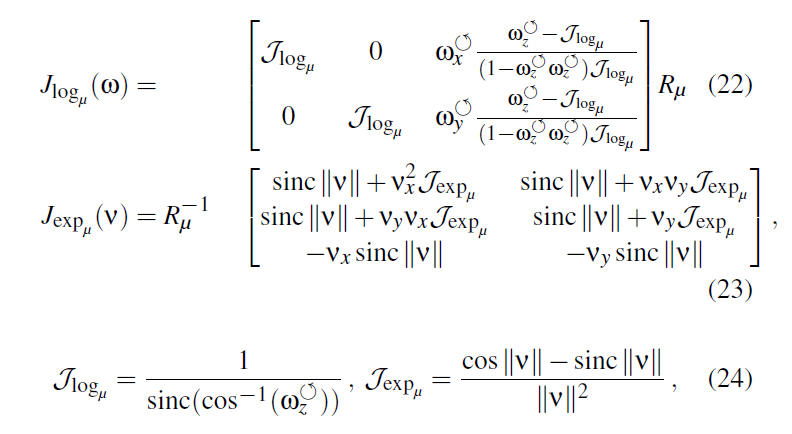
- solid-angle:雅可比矩阵变换
![]()
- \(G=J^{T}J\),\(J\in\mathbb{R}^{3\times2}\)
- 非方阵的行列式
\[ \vert{\det(J)}\vert=\sqrt{\vert{\det(J^{T}J)}{\vert}} \]
- K个 tangent -space GMM
- 其中 \(\pi_k\) 为权重系数,对每一个 \(\omega\) 而言,和都为 1
sampling
- 根据权重 \(\pi_k\) 采样 \(k\)
- 根据第 \(k\) 个 tangent-space GMM
采样 \(v\)
- 双射性质只在 \(\Vert{v}\Vert<\pi\)
时满足,因此不满足时直接丢弃,使用 \(p(\omega)\)
- 实际丢弃的很少(on average \(0.021\%\))
- 双射性质只在 \(\Vert{v}\Vert<\pi\)
时满足,因此不满足时直接丢弃,使用 \(p(\omega)\)
- 计算 \(\omega\leftarrow v\)
Additional dimensions
- 额外的维度,例如 3D 位置 \(x\),只需要平移即可
- 不需要旋转?
- 这样就从 spherical or Euclidean 坐标系转化到了 tangent-space
EM 学习
- 直接学习条件分布很复杂,我们选择学习联合分布,然后在过程中加上条件
- EM 的思想:反复采样 GMM,更新主统计量,更新 GMM 参数(每次更新都让最大似然增大)
Mini-batch EM
初始样本:\(x_1,\cdots,x_{M}\in\mathbb{R}^{D}\),以及他们的在蒙特卡洛框架中的权重 \(w_1,\cdots,w_M\in\mathbb{R}\)
计算主统计量
- 更新参数值

tangent spaces
- 给定初始的 \(M\) 个样本,方向向量 \(\omega_i\in \mathbb{S}^{2}\),权重 \(w_i\in\mathbb{R}\)
- 计算主统计量 \(S_k^{(0)}\)
- 计算 \(\mu\)-centered tangent-space \(v_i\)
- 计算主统计量 \(S_k^{(1)}\)
- 计算 \(\hat{\mu}_k\)

- 根据 \(\hat{\mu}_k\) 计算 \(S_k^{(2)}\)(先算出 \(\hat{v}_k\))
- 更新 \(\hat{\sum}_k\)
- 因为 \(\hat{\sum}_k\) 和 \(\hat{\mu}_k\) 绑定,而不是 \(\mu_k\)

- 加上 3D 位置信息
- \(\log\) 变换就是平移
Efficient Conditioning and EM
- incident radiance field:
- 上千个 GM,都过一遍效率低
- 发现:只有 \(\mu_k\) 接近 \(x\) 的 GM 才会影响条件分布 \(p_{L_i}(\omega_i,x)\)
- \(x\) 按照 AABB 最长轴归一化
- 可以用于加速
- EM 算法也能根据这一点加速
- 加速:spatial kD-tree partitioning
- 每个叶子节点保留 16 个 GM
- 同时也设置为 mini-batch 的训练数,这样不同的 GM 可以同时进行优化
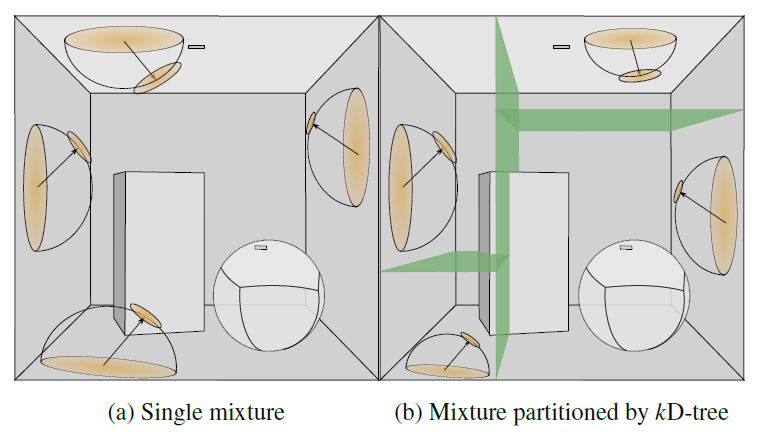
- 和不用 kd-tree 相比,结果差别不大,但是训练速度大幅度提升
product sampling
- 使用如下近似,代替更新(按照上面的方式需要根据 \(\hat{\mu}_2\) 进行更新,这样很慢)
- \(\mu_1\)-centered,误差只在 \(\mu_2\) 的 \(\hat{\sum}_2\)

- 实际中:BSDF 作为 \(\mu_2\)
Implementation in a Renderer
- BSDF 的训练是和 \(L_i\)
的训练一起的,不需要预训练
- nD GM:n is the number of BSDF parameters
- 限制:isotropic BSDFs
- 各向异性需要增加 GM 的个数
- 均匀采样 \(\phi,\omega_o\),根据 BSDF 重要性采样 \(\omega_i\),mini-batch EM 用于优化
- product sampling 的时候,只选择权重最大的两个 BSDF
Robust EM
- \(L_i\) 的优化:4spp 更新一次,总预算超过 \(1/4\) 之后停止训练
- EM 容易陷入局部极值,初始化尽量均匀
- 初始化
- 5D 均匀分布,空间 kd-tree(\(8\times8\times8\))
- 初始化 GMM,至少 16 个样本(不够则等待)
- kmeans++ 找出两个中心,然后每个中心构建均匀分布的 8 个 GM
- 训练轮
- 如果叶子节点的总样本数量大于 \(c=16000\),则分裂(重新分布样本)
- 递归进行
- GMM 拷贝到子节点
- 如果叶子节点的总样本数量大于 \(c=16000\),则分裂(重新分布样本)
?TODO