(论文)[2022-SIG] EARS: Efficiency-Aware Russian Roulette and Splitting(2)
EARS
Efficiency-Aware RRS
Application to rendering
- 两个问题
- 每一个像素都是一个积分
- RRS 发生在很多跳上
Objective
- 找到一个最优的 local splitting factors 使得整张图片的 total
efficiency 最大化
- 仍然是一个凸优化问题(凸函数的和)
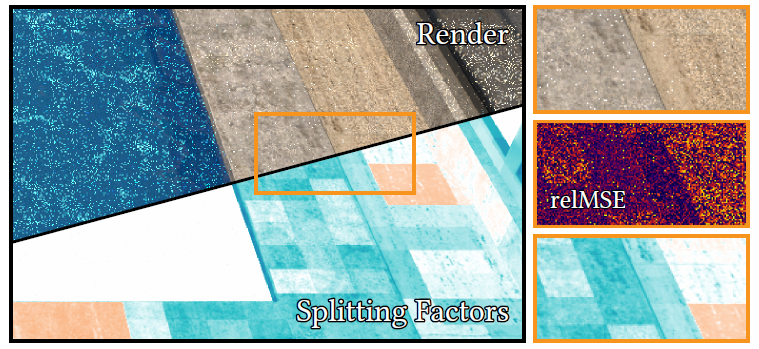
- relMSE 取代 MSE
- 方差部分,如果使用原始目标函数的绝对误差度量,会导致一直在优化比较亮的像素,我们使用如下的相对误差度量
- MSE:对亮区域过度采样,导致计算开销都花在比较亮的区域上
- relMSE:计算开销分布更加平均
- 问题:\(I_{\text{px}}\) 不可知(使用降噪后的结果作为标准值)
不动点迭代函数
- 第 \(i\) 次迭代
- 计算过程和之前类似
\[ \dfrac{\partial{\bar{V}(n)\bar{C}(n)}}{\partial{n}}=\dfrac{\partial{\bar{V}(n)}}{\partial{n}}\bar{C}(n)+\bar{V}(n)\dfrac{\partial{\bar{C}(n)}}{\partial{n}}=0 \]
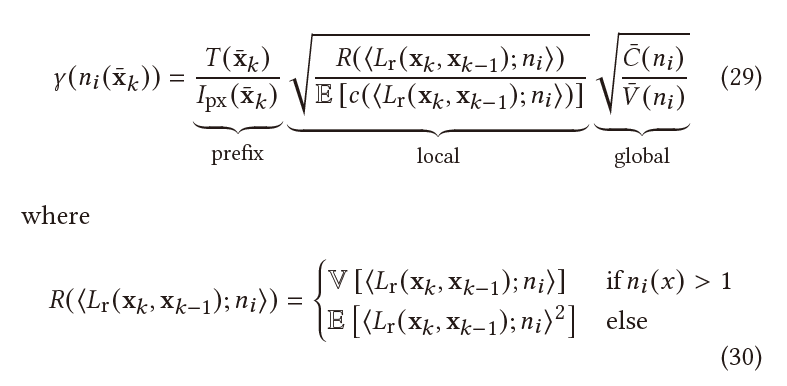
- 细节
- 3个部分
- prefix:已知
- local:局部估计,可以存储在 5D 的数据结构里
- global:全局信息,可知(所有像素的平均计算代价、方差 \(\sum_{\text{px}}\) )
- 算法优势
- 虽然是不动点迭代的算法,不需要为所有的前缀路径 \(x\) 显式存储连续的 RRS 函数 \(n(x)\)
- 我们只存储相关的统计量(方差、开销)用于下一轮的迭代
- 不是每到一个点就迭代计算 n(x) 吗?对的,不是
- 每次迭代随机更新一组前缀 \(x\)
- 只要前缀能够被采样到,那么更新概率就不为 0,因此最终能收敛
- 1997 年的论文依赖于前缀 \(x\) 的长度,因此需要降维才能计算,该方法不依赖
收敛性
- \(\bar{\mathrm{x}}\) 前后的点是否发生 RRS,不影响这个点 RRS 的收敛性
- 其他的点和 \(\bar{\mathrm{x}}\)
处的 RRS 的收敛无关
- 不影响附录 C 收敛性的证明
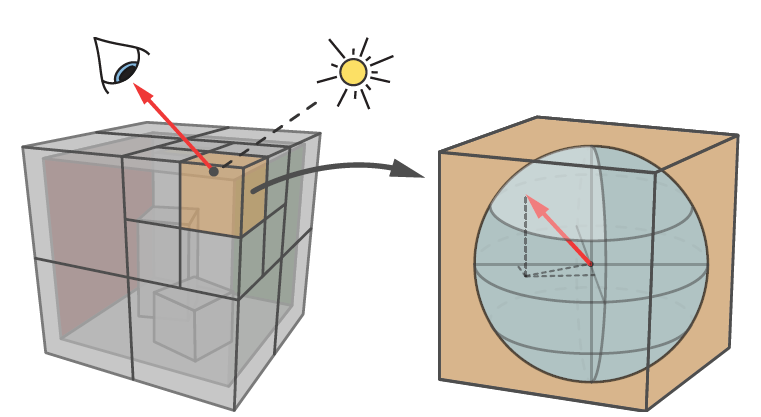
例子
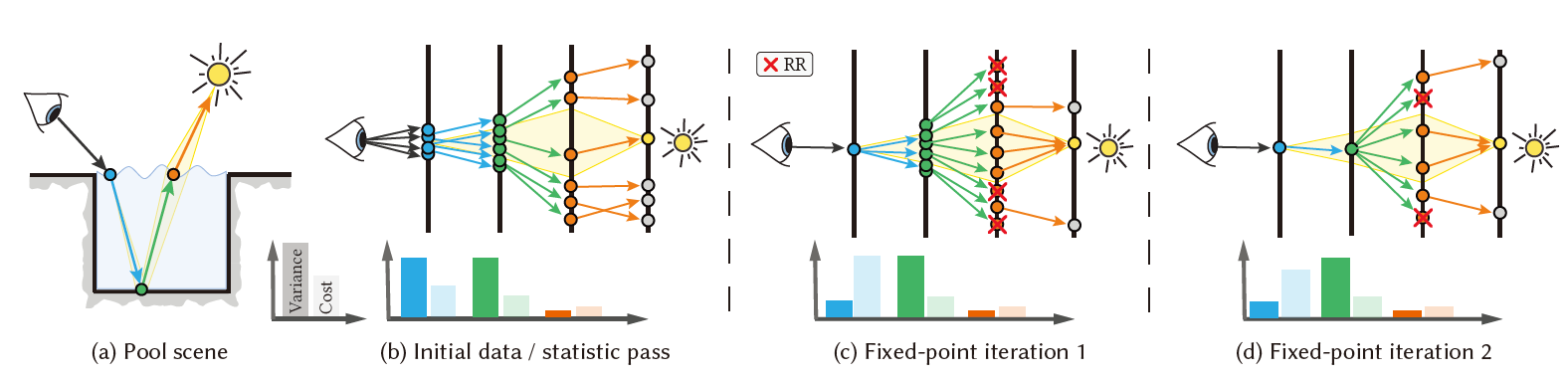
- 场景设置,黄色部分表示能够产生的焦散的地方
- 初始化,classic albedo-based RR(没有 S)(具体看代码),同时保存每一个点的 \(\langle L_i\rangle\) 的统计量(方差、开销)
- 方差:反向传播(主要在 diffuse 表面)
- 开销:初始开销 = 后缀长度
- 第一次迭代,高方差 S 分裂(蓝色、绿色节点),找不到光源的(黄色区域外)被 RR 删除(橙色节点)
- 第二次迭代,高方差分裂(绿色节点),找不到光源的被 RR 删除(橙色节点)
实现
- Mitsuba 0.6,递归 PT 为基础
- iterative rendering process
- 每一轮迭代,对每一个像素采样样本,用于计算 global/local 的方差
- local 的估计存储在 5D 数据结构中
- 算法:
- 初始:classic prefix weight-based RR
- 迭代:根据 式子29 更新 RRS 值
- 减小计算开销:慢慢增长迭代的时间(多 spp 更新),从而减少更新次数
- 迭代早期图片方差大,方差倒数加权合并
- 最优合并问题(the optimal combination of image)
- 引入 bias(方差估计使用的样本问题)
- bias 小,可忽视,随着迭代增加消失
- TODO:David Kirk and James Arvo. 1991. Unbiased Sampling Techniques for Image Synthesis
- 算法伪代码
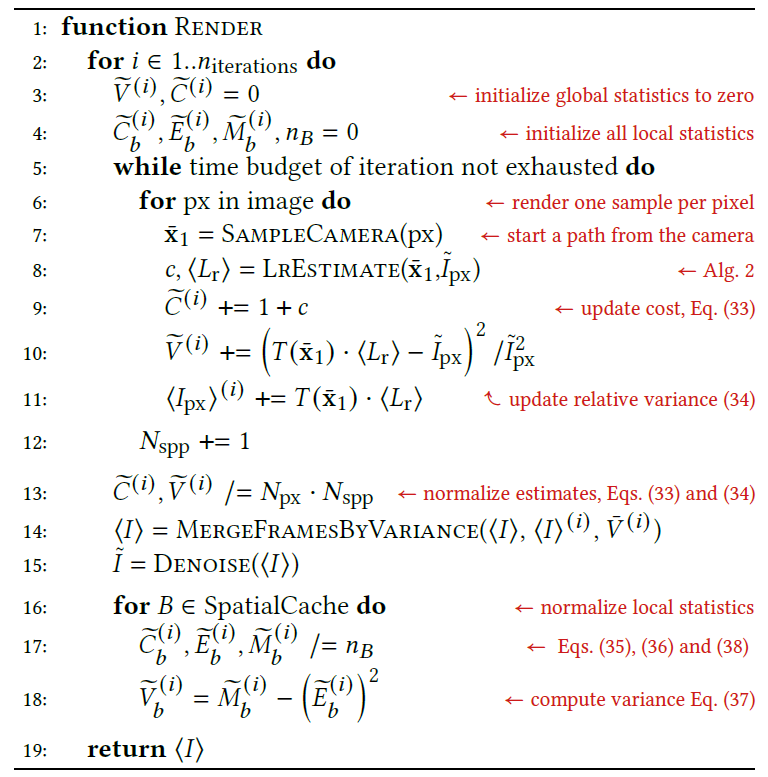
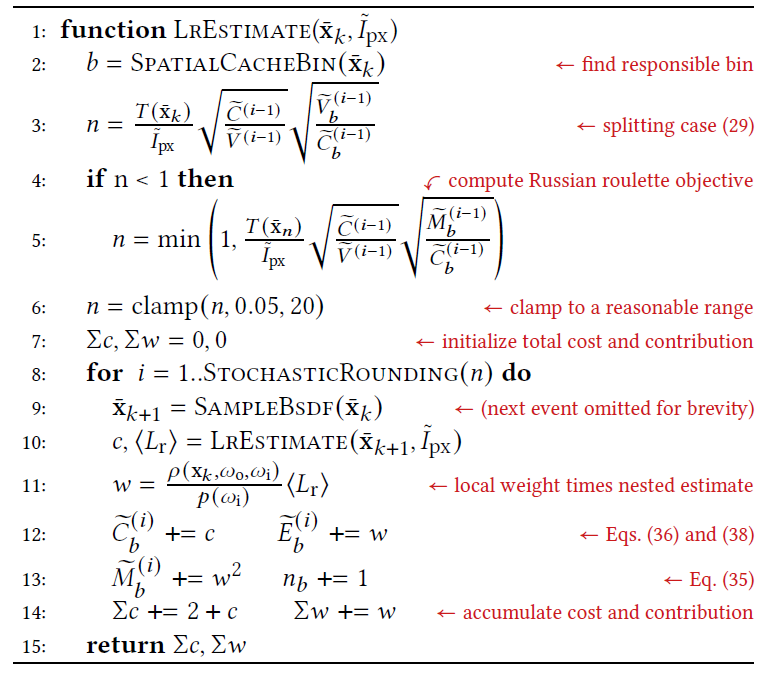
- LrEstimate 中的 contribution 部分应该除以样本数(splitting factor)
Adapting the theory
NEE
- 和 ADDR 一样,把 NEE 和 BSDF 采样作为一个原子操作(1 NEE + 1 BSDF)
- 这样设定下,RRS 的分析和之前一致,仍然最优
- 更一般情况下则不是最优(NEE 数量和 BSDF 数量在不同的 shading point 不一样)
Handling colors
- 多通道
- 方差对所有通道平均

- 此时最优化的区别就是,需要在对 \(\lambda\) 求平均
- component-wise
- \(I_{\text{px}}\) 表示 relMSE,上面 \((31)\) 没有显式写

Cost heuristic
- 光线数量
- 简单近似:所有光线计算代价相同
- shadow rays
- primary rays from the camera
- BSDF samples
Clamping
- RRS:\((0.05,20)\)
- 可以避免
- bias:\(n(x)=0\)
- 过多的光线,RRS 过大
Global estimates
- 全局的计算开销
- 对所有像素求平均
- 一个迭代轮可能有多个 spp

- relMSE:和降噪后的图片 \(\tilde{I}_{\text{px}}\) 做对比
- \(\langle{I_{\text{px}};n}\rangle_{s}\) 包括 splitting,每一个 path tree 都会被考虑

- outlier:去除 \(0.001\%\) 方差最大的样本
Local Estimate
- 空间八叉树 octree + 方向树 histogram
- 方向:\(4\times4\) 直方图,高分辨率提升不大
- octree,40000+样本时候分裂叶子节点(类似 PPG)
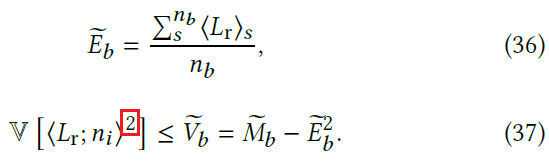
Building the estimates
- 每一个方向 \(b\) 保存统计量
- 方差:\(\tilde{V}_b\)
- 二阶矩:\(\tilde{M}_b\)
- \(\langle{L_\text{r}}\rangle\) 的计算开销:\(\tilde{C}_b\)
- \(n_b\):\(b\) 内的样本数
- 二阶矩

- 方差
- 这里做了近似
- TODO:近似是什么?
- \((37)\) 应该没有平方
- 这里做了近似
Incremental learning
- 根据不动点的理论,这一轮统计量的更新应该只依赖于上一轮,但是如此收敛慢,因此将之前所有轮次的统计量都使用
- 利用之前的样本进行学习
- 收敛率有所降低,但是统计量可靠性提升了,最终变快了
EVALUATION
- 和 ADRRS 进行对比
- 对比场景
- 只有 RR
- RR+S
- 只有 S(都表现得不好)
- baseline
- classic prefix weight-based RR(5th bounce 开始启用)
- adaptive sampling variant(在线学习方差,预先提供了GT,但是不算在渲染时间中)
- 测试
- equal-time(10min)
- AMD Ryzen 3950X CPU with 16 cores
- max depth:40
- 结果 relMSE(平均)
- \(1.52\times\) ADDR
- \(5.87\times\) classic RR
- 最差(Glossy Bathroom)比 ADDR 慢 \(9\%\)
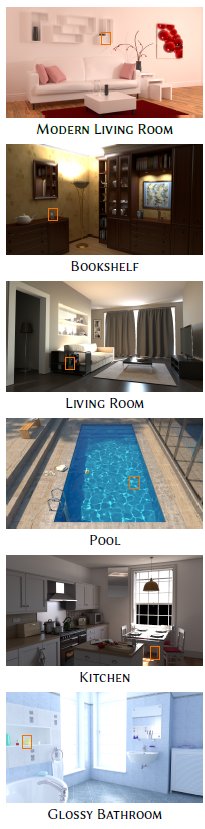
- 场景介绍
- Modern Living Room
- mostly diffuse,large spherical light(前向 PT 友好)
- 结果
- 与 ADRRS 相比,没有明显提升,但是噪声更均匀
- 与 Adaptive PT 相似,焦散噪声变小,其他地方轻微变大
- 简单场景中,不如简单算法效果好(额外开销大)
- Bookshelf、Living Room
- strong,difficult diffuse indirect illumination
- 结果
- 暗表面过多,classic RR 提前停止
- Splitting 相较于 Adaptive 的优势,一旦找到一条可行光路,能够生成若干其他可行光路
- Pool
- 优于 ADRRS(variance and cost > expected contributions)
- Kitchen(上面两类场景的并集)
- Glossy Bathroom
- homogeneous illumination
- 过于简单了
- Modern Living Room
统计数据
- 考虑 RR,spp 数增加
- 考虑 S,spp 数减小
- 和 ADRRS (up 2)相比,EARS 一条光线的分裂数更多(up 67)
- 而且更多发生在光线和场景的第一个交点(ADRRS:1,EARS:up 18)
- 哪里方差大就去优化哪里
overhead
- 5D tree:24M,空间划分:22,000 regions
- 再大之后,计算开销比收益更大
Convergence
- 理论收敛,但是实际有问题
- 原因:noise in the estimates
- 测试:充足迭代轮,能够收敛
Path Guiding
- 和 Muller 的 PPG 结合
- 数据结构一样
- classic RR:throughout weight
- albedo 的乘积效果更好
- 暗表面的 guiding,如果某个方向采样 pdf 大,但是 throughout weight 低,则 RR 可能会删除(好处抵消了)
limitation and future work
- limit:the accuracy of the required estimates
- future:EARS 和 image space adaptive sampling and bidirectional algorithms 结合
Estimation error
- Noise in the local estimates
- 不同 cache 的样本数相差太大,估计的准确率相差太大:收敛速度不一样
- 解决方案:spatial filtering(sharing estimates between caches)
Combining with Adaptive Sampling
- 在 primary hit point 就是使用了
RR(增大了方差,把计算资源分配给其他像素了,总体效率提高)
- local 方差小,global 方差大
- 可以直接和 adaptive 相结合,直接不采样这些光线(本身也是浪费了),效率更高
- 改动:maximize the efficiency of each individual pixel
Bidirectional methods
- BDPT 需要考虑 MIS 权重,RRS 也会成为其中的一部分,更加复杂了
- 视子路 RRS 会影响 光子路 RRS,更难优化(非凸问题)
- 相关性问题
其他
- Participating media
- Correlated sampling
- uncorrelated sampling:方差 \(\propto O(n^{-1})\)
- QMC 并不是
- quasi-Monte Carlo sampling
- Dynamic scenes
- 学习得到的统计量在帧间复用
收敛性证明
- 凸函数就能保证
- 如下证明以 S 为例
- \(\gamma(n)\) 函数:等式 29
- 恒正
- 只有 global 部分相关
\[ \gamma(n)=A\sqrt{\dfrac{a+bn}{c+\dfrac{d}{n}}}\in O(\sqrt{n}) \]
- 于是有
\[ \gamma'(n)>0,\gamma'(n)\in O\left(\dfrac{1}{\sqrt{n}}\right) \]
- 于是 \(\gamma(n)\) 是严格递增的凹函数,而且具有如下的极限性质

- 大致图形如下
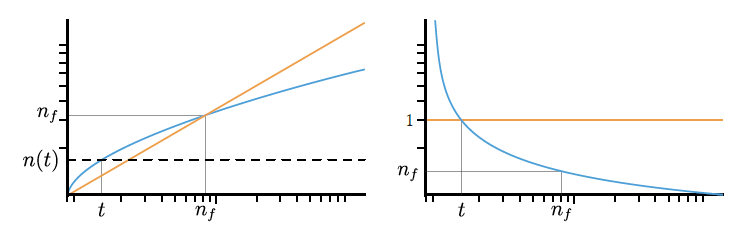
- 此时,存在 \(t\) 满足 \(\gamma'(t)=1,\gamma(n_f)=n_f\)
- \(x>t\):满足条件
- \(\gamma'(x)<1\)
- 自映射:\([n(t),\infty)\subset [t,\infty)\)
- \(x<t\Rightarrow \gamma(x)>x\)
- \(x>t\):满足条件
- RR、RRS 证明同理
总结
- 不动点迭代的体现
- 使用上一轮的统计量更新 RRS,使用这一轮的 RRS 更新统计量
- 下一轮使用的统计量相当于是使用这一轮更新得到的
- 统计量的迭代更新和 RRS 的迭代更新是一致的
- 不动点迭代逻辑:\(\gamma_{i-1}\to\text{local}_{i-1}\to\gamma_{i}\)