(论文)[2022-SIG] EARS: Efficiency-Aware Russian Roulette and Splitting(1)
EARS
introduction
- 大部分 PT 算法中,很多计算都被浪费在追踪低贡献的长路径中
- RRS:Russian roulette (RR) and splitting
- RR:提前终止
- S:相同前缀产生多个后缀
- 分裂在高方差处需要多一些
- 例如焦散的 diffuse 表面
- ADDRS 只考虑了期望贡献值,但是没有考虑方差,只能保证这些路径仍然存在,但是不能分裂
相关工作
- RR
\[ E(\bar{x})=\Pr(\text{ternimation})\times0+\Pr(\text{survial})\times \dfrac{E(\bar{x})}{\Pr(\text{survial})} \]
- RR,S 最早提出:Particle Transport and Image Synthesis [1990-Kirk]
Albedo-based
- 当前路径的权重降低到设定值之下时,使用 RR
- 将击中表面的三个通道的 albedo 的平均值设置为 path 的 survival 概率
- 考虑 throughput weight, albedo, and surface roughness 的启发式函数
- 上面 3 种方法的潜在假设:经过多次 dark surface 散射的路径贡献较低
- 失效:复杂间接光照、亮光源照亮暗表面
- RR 只在深度达到一定值之后开启(例如 5)
Approximated contributions
- efficiency-optimized Russian roulette [Veach-1997]
- BDPT 连接时候的 shadow ray test
- 连接问题:\(v_it_i\)
- RR:\(C_i\)
- \(q_i\) 的概率处理连接问题(计算可见性 \(v_i\) ),\((1-q_i)\) 不处理
- \(q_i=\min(1,\dfrac{t_i}{\delta})\)
- RR 引入的额外方差:\(v_i=1,t_i=\text{const}\)
- \(V[C_i]=t_i^2(\dfrac{1}{q_i}-1)\)
- 效率:最优化 \(q_i\) \(\Rightarrow\) \(\delta=\sqrt{\dfrac{\sigma_0^2-t_i^2}{n_0-1}}\)
- 假设重复采样,如此才能计算 \(\sigma_0,n_0\)
- 实际操作:使用前 \(N_0\)(固定)个样本用于估计
- \(T\) 简单认为是光线数目
\[ \dfrac{1}{\sigma^2T}=\dfrac{1}{\left(\sigma_0+t_i^2\left(\dfrac{1}{q_i}-1\right)\right)\left(n_0-\left(1-q_i\right)\right)} \]
- ADDRS [Vorba-2016]
- 通过计算当前贡献值与场景中平均 incident radiance 的比值,来使用 RRS
- 解决了高贡献路径的早停问题
- 问题:使用期望而不是方差/效率作为评估
- 复杂路径的分裂处理得不好
Efficiency analysis
- Bolin and Meyer [1997]
- optimal RRS factor per pixel and path length
Adaptive sampling
- adaptive sampling(also called sequential sampling)
- 方差多的地方多采样
- [Zwicker 2015] image space,每个像素的 spp 自动确定
Fixed-point iterations in rendering
- 辐射度算法
- Path Graph:TODO
background
- 渲染方程
\[ I_{\text{px}}=\int f_{\text{px}}(\bar{\mathrm{z}})\;\mathrm{d}\bar{\mathrm{z}} \]
- MC 无偏估计
\[ \left\langle I_{\text{px}}\right\rangle=\dfrac{f_{\text{px}}(\bar{\mathrm{z}})}{p(\bar{\mathrm{z}})} \]
- 效率:方差、计算代价乘积的倒数
- 积分形式如下
- 计算代价的一个启发式:追踪的光线数目

- 前缀路径:\(\bar{\mathrm{x}}_k=\mathrm{x}_0\cdots \mathrm{x}_k\)
- 贡献值
- \(t_{\text{px}}\):throughout
- the product of sensor response, pixel contribution, BSDFs, and geometry terms
- \(t_{\text{px}}\):throughout

- 前缀权重

- MC 估计

- Russian roulette (RR)
- \(q\):survival probability

- Splitting:相同前缀 \(\bar{\mathrm{x}}_k\) 生成 \(n(\bar{\mathrm{x}}_k)\) 个独立的后缀
- \(\left\langle L_{\text{r}}\right\rangle\) 方差比较大时,效果比较好

- Russian roulette and splitting (RRS):RR+Splitting,结合到同一个框架里


- RRS 无偏性
- 当 \(\lfloor{s(\bar{\mathrm{x}}_k)}\rfloor={s(\bar{\mathrm{x}}_k)}\) 时,显然成立,考虑 \(\ne\) 情况
\[ \begin{aligned} E\left[\left\langle I_{\text{px}};s\right\rangle\right] &= \left({s(\bar{\mathrm{x}}_k)}-\lfloor{s(\bar{\mathrm{x}}_k)}\rfloor\right) \sum^{\lfloor{s(\bar{\mathrm{x}}_k)}\rfloor+1} \dfrac {E\left[\left\langle T(\bar{\mathrm{x}}_k)L_{\text{r}}(\bar{\mathrm{x}}_k,\bar{\mathrm{x}}_{k-1})\right\rangle\right]} {\lfloor{s(\bar{\mathrm{x}}_k)}\rfloor+1}\\ &\quad+ \left(1+\lfloor{s(\bar{\mathrm{x}}_k)}\rfloor-{s(\bar{\mathrm{x}}_k)}\right) \sum^{\lfloor{s(\bar{\mathrm{x}}_k)}\rfloor} \dfrac {E\left[\left\langle T(\bar{\mathrm{x}}_k)L_{\text{r}}(\bar{\mathrm{x}}_k,\bar{\mathrm{x}}_{k-1})\right\rangle\right]} {\lfloor{s(\bar{\mathrm{x}}_k)}\rfloor}\\ &= \left({s(\bar{\mathrm{x}}_k)}-\lfloor{s(\bar{\mathrm{x}}_k)}\rfloor\right) \sum^{\lfloor{s(\bar{\mathrm{x}}_k)}\rfloor+1} \dfrac {I_{\text{px}}} {\lfloor{s(\bar{\mathrm{x}}_k)}\rfloor+1} + \left(1+\lfloor{s(\bar{\mathrm{x}}_k)}\rfloor-{s(\bar{\mathrm{x}}_k)}\right) \sum^{\lfloor{s(\bar{\mathrm{x}}_k)}\rfloor} \dfrac {I_{\text{px}}} {\lfloor{s(\bar{\mathrm{x}}_k)}\rfloor}\\ &=\left({s(\bar{\mathrm{x}}_k)}-\lfloor{s(\bar{\mathrm{x}}_k)}\rfloor\right){I_{\text{px}}}+\left(1+\lfloor{s(\bar{\mathrm{x}}_k)}\rfloor-{s(\bar{\mathrm{x}}_k)}\right){I_{\text{px}}}\\ &={I_{\text{px}}} \end{aligned} \]
- Nested RRS
- 每个路径节点都可以有 RRS
- \(\left\langle L_r\right\rangle\):primary estimator(1 sample per vertex)

- 此时 throughout 如下

Efficiency-Aware RRS
- 问题:当给定路径前缀 \(\bar{\mathrm{x}}_k\) 时,求解得到最优的 RRS 值
- 抽象问题,前缀 \(x\),后缀 \(y\)

\[ \langle{I}\rangle=\dfrac{g(x_j)}{p(x_j)}\sum_{i=1}^{n(x_j)}\dfrac{h(x_j,y_i)}{n(x_j)p(x_j,y_i)} \]
Optimal splitting
- \(n(x):\mathcal{X}\to\mathbb{N}\)
- \(y_i\) 独立

- objective:最大化效率
\[ \mathop{\arg\max}_{n}\;\mathbb{V}\left[\left\langle I;n\right\rangle\right]\mathbb{E}\left[c\left(\left\langle I;n\right\rangle\right)\right] \]
方差
- 方差(条件期望展开):\(V=VE_y+EV_y\)
- \(V_{\mathcal{Y}}\):不加 splitting 的方差
 \[
\langle{H(x)}\rangle=\dfrac{h(x,y)}{p(y\mid x)}
\]
\[
\langle{H(x)}\rangle=\dfrac{h(x,y)}{p(y\mid x)}
\]
- 1997 年论文原始公式如下

cost
- 假设:代价 \(\propto\) 发射的光线数目(样本数)
- (期望)代价 = 前缀 + 后缀
- 这里的内层,\(\langle{H(x)}\rangle\) 其实还有一个 \(E\)(期望)

优化
- 假设:\(n(x)\) 是实数
- 这样可以微分、凸优化
- 引入偏差:最终需要做 round 操作
- 实数定义上,效率函数关于 \(n(x)\)
是凸函数,有唯一的全局最优值
- \(ax+\dfrac{b}{x}+c,x>0\)
- 如何求得?偏导为 0

- 有解析解,但是求解不现实
- 统计量难以估计
- 递归依赖,RRS 发生在各个阶段
- 解析解如下

- \({\color{red}p(x)}\) 哪里来的?
- 解释:期望展开对可能的数据点求导
- \(n(x)\):一个 \(x\) 对应一个 \(n(x)\)
- 离散展开
\[ \dfrac{\partial{V[\langle{I;n}\rangle]}}{\partial n(x)} =\dfrac{\partial{E\left[\dfrac{V_{\mathcal{Y}}(x)}{n(x)}\right]}}{\partial n(x)} =\dfrac{\partial{\left(\sum_{i}\dfrac{V_{\mathcal{Y}}(x_i)}{n(x_i)}p(x_i)\right)}}{\partial n(x_i)} =-\dfrac{V_{\mathcal{Y}}(x_i)p(x_i)}{n^2(x_i)} \]
- \({\color{red}p(x)}\) 哪里来的?
- 泛函:\(n(x)\) 是一个函数
\[ f(n)=E\left[\dfrac{V_{\mathcal{Y}}(x)}{n(x)}\right]=\int\dfrac{V_{\mathcal{Y}}(x)}{n(x)}p(x)\;\mathrm{d}x \]
\[ \begin{aligned} f(n(x)+\delta n(x))-f(n(x)) &=\int\dfrac{V_{\mathcal{Y}}(x)}{n(x)+\delta n(x)}p(x)\;\mathrm{d}x-\int\dfrac{V_{\mathcal{Y}}(x)}{n(x)}p(x)\;\mathrm{d}x\\ &=\int-\dfrac{V_{\mathcal{Y}}(x)p(x)}{n(x)(n(x)+\delta n(x))}\delta n(x)\;\mathrm{d}x\\ &=\left\langle-\dfrac{V_{\mathcal{Y}}(x)p(x)}{n^2(x)},\delta n(x)\right\rangle+o(\delta n(x))\\ \end{aligned} \]
不动点迭代
- Fixed-point iteration

- 收敛性分析
- 条件:自身映射、连续、导数小于1
- 这里要求 \(D=(t,+\infty)\) 的形式
- 如果初始化点 \(x\notin\) 定义域
\(D\),增加如下条件
- \(x_0\notin D\),迭代几步之后进入 \(D\)
- \(D=(t,+\infty)\Rightarrow\) 的条件下,就是要求 \(g(x)>x,\forall x\le t(/\forall x\notin D)\)
- 这个作用是将初始条件放松到任意正值
- 条件:自身映射、连续、导数小于1
- TODO:附录 C
结合 RR
Optimal RR
- 只考虑 RR,不考虑 S
- RR 必然增加方差
- 方差如下(推导)
- 同样为凸函数
- 此时不动点迭代函数如下
- 推导过程和上面一样,求偏导 \(=0\)

Optimal RRS
- 联合优化
- 分段函数
- 将二者用统一的方式表达


- 此时效率函数 \(\epsilon^{-1}\) 还是凸函数
- 方差
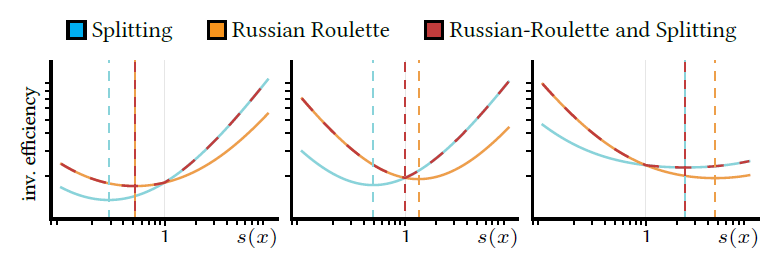
- 从定义上看,二者显然都是递减的
- \(s(x)=1\) 时,值相等(连续)
- \(\epsilon^{-1}\)
- \(s(x)=1\) 时,值相等(连续)
- \(x<1\) 时,RR 值更大;\(x>1\) 时,RR 值更小(牛的)
- 代价函数定义相同,只需要比较方差项
- 式子 \((26)\),上面定义为 \(A\),下面定义为 \(B\)
\[ \begin{aligned} E[A]-E[B] &=E\left[\dfrac{V_{\mathcal{Y}}(x)}{s(x)}-\dfrac{M_{\mathcal{Y}}(x)}{s(x)}+\left(\dfrac{g(x)}{p(x)}H(x)\right)^2\right]\\ =&E\left[\dfrac{1}{s(x)}(V_{\mathcal{Y}}(x)-M_{\mathcal{Y}}(x))\right]+E\left[\left(\dfrac{g(x)}{p(x)}H(x)\right)^2\right]\\ =&E\left[-\dfrac{1}{s(x)}\left(\dfrac{g(x)}{p(x)}H(x)\right)^2\right]+E\left[\left(\dfrac{g(x)}{p(x)}H(x)\right)^2\right]\\ =&E\left[\left(\dfrac{s(x)-1}{s(x)}\right)\left(\dfrac{g(x)}{p(x)}H(x)\right)^2\right] \end{aligned} \]
- 分类讨论:根据上面两个条件,对最优值的位置分类讨论,发现都是凸函数
- 交点一阶导递增
- 算法
- 首先计算分裂因子 \(n(x)\),如果结果大于 \(1\),那么就是最优值
- 否则计算 RR 值,并将结果 clamp 到 \(\le1\)(恰好为 \(1\) 取到最值)

- 看到代码里面优先 RR
1 | // src/integrators/path/recursive_path.cpp:L416 |