(论文)[2021] A Survey on Bounding Volume Hierarchies for Ray Tracing(4)
BVH Survey
4. construct bvh
4.5. Topology Optimization
- 我们在构建 BVH
的过程中,无法知道子结点的代价函数值,因此都是做的局部优化(简化)
- 例如将子节点的内部节点都当作叶子节点来考虑
- 因此结构优化就是先建立好一个 BVH,然后对其进调整优化
- 这一部分的优化目标基于 SAH(内部节点的 BVH 表面积之和最小)
tree rotation
- 树结点的旋转操作(二分查找树的旋转操作)
- 一共有 4 种旋转方式
- 论文提出了两种方法
- Hill Climbing
- Simulated Annealing:避免陷入局部极值
Hill Climbing
- 按照中序遍历的方式一次检测每一个节点
- 对每一个节点做如下操作
- 计算当前点的代价函数
- 应用上面的 4 种旋转(不行则不旋转),记录代价函数减小最多的旋转
- 如果有减小,使用这个旋转更新,同时更新当前点的代价函数值
- 如果没有减小,则检测下一个节点
- 问题:可能会陷入局部极值(很多情况下)
Simulated Annealing
- 模拟退火
- 基本思想是,对于可能增加 SAH 的旋转,也有一定概率接受(可能会走向全局最优)
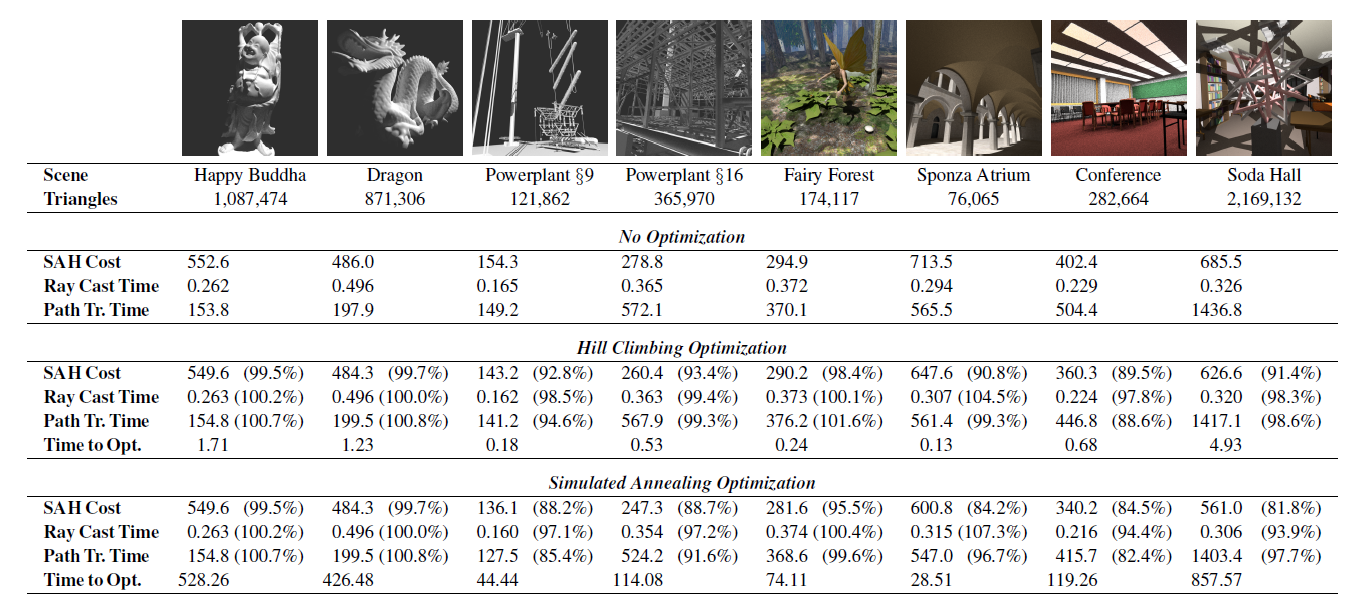
结果
remove and reinsert
- Fast Insertion-Based Optimization of Bounding Volume Hierarchies.
- 移除一棵子树,然后把这棵子树中的节点重新插入
- 查找空间很大,因此需要确定处理子树的顺序
- 一个直观的顺序:按照 SAH 的代价函数值的大小(下图)
- 查找新位置
- 带剪枝的搜索算法(分支限界算法)

- T-SAH: Animation Optimized Bounding Volume Hierarchies
- 使用 Metropolis-Hastings sampling 的方式优化先移除哪一棵子树
PRBVH
- 一个很重要的假设:每个叶子节点只包含一个三角形
- 论文:Parallel Reinsertion for Bounding Volume Hierarchy Optimization
- 并行化,把上面的问题重新形式化成一个可以并行的问题
- 最终结果:类似质量下,比原来串行化快两个数量级
- The key insight:我们在计算 SA 缩减的时候不需要真正去移除子树,找到最优位置之后再进行移除
- 给很多个 node 并行的找最优的插入位置(SAH cost 减少最多)
- 思路:迭代算法
- 输入为一个任意的 BVH,然后迭代优化,每一轮迭代并行执行一组 reinsertion 操作
- each node searches for its best output node in parallel
- the conflicts between nodes are resolved using the locking scheme
- The nodes with successful locks can be reinserted
- After the reinsertion, we recompute the bounding boxes and the SAH cost
- SAH cost
\[ c(N)=\dfrac{1}{SA(N)}\left[c_T\sum_{N_i}SA(N_i)+c_I\sum_{N_l}SA(N_l)\vert{N_l}\vert\right] \]
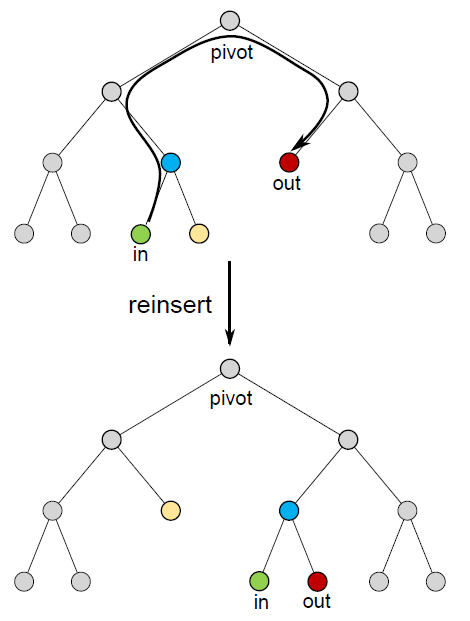
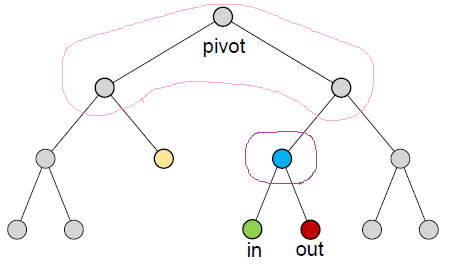
Reinsertion Operation
- 对每一个节点
- 将其所在的子树(绿色)连同它的父节点(蓝色)一起移除,然后将其兄弟节点(淡黄色)放到父节点原来的位置
- 将移除部分插入到找到的最优位置(红色),将这个位置原来的节点挂在兄弟节点的位置
Parallel Search
- 每一个叶子节点都只包含一个三角形
- 此时优化 SAH cost,就等价于优化这个部分(其他都变为常数)
\[ \sum_{N_i}SA(N_i) \]
- 形式化优化问题:maximization of the surface area decrease
- 等价于最大化受影响的 BVH 的 SA 减小
- 受影响的 BVH 只有输入、输出节点之间的路径
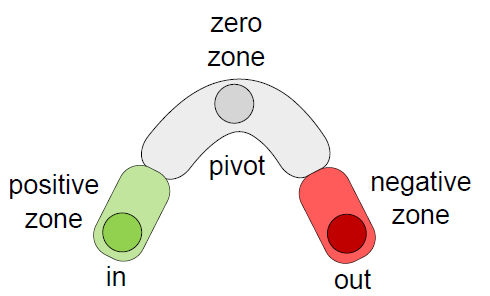
- 上图中的
in-pivot-out - pivot:最近公共祖先节点
- 移除:\((pivot,in]\) 中的节点的 SA 的减小的非负的(一定减小或不变)
- 插入:\((pivot,out]\) 中的节点的 SA 的减小是非正的(一定增加或不变)
- 上图中的
- 可以按照 SA 是增加还是减小,将这些路径上的节点划分为几类
- 路径不包括 in 节点、in 节点的父节点、output 节点
- 对一个输入节点 in,如何寻找输出节点 out?
- 查找所有树上的节点(除了以 in 节点为根的子树内的节点)
- 利用 parent 指针可以不使用辅助的栈结构实现
- 利用一个 bool 记录是上行还是下行,利用指针进行上下游走
- python 代码
- 总的来说就是一个带剪枝的找最优 output 位置的算法
- 对于所有的节点,可以并行地找出最佳位置
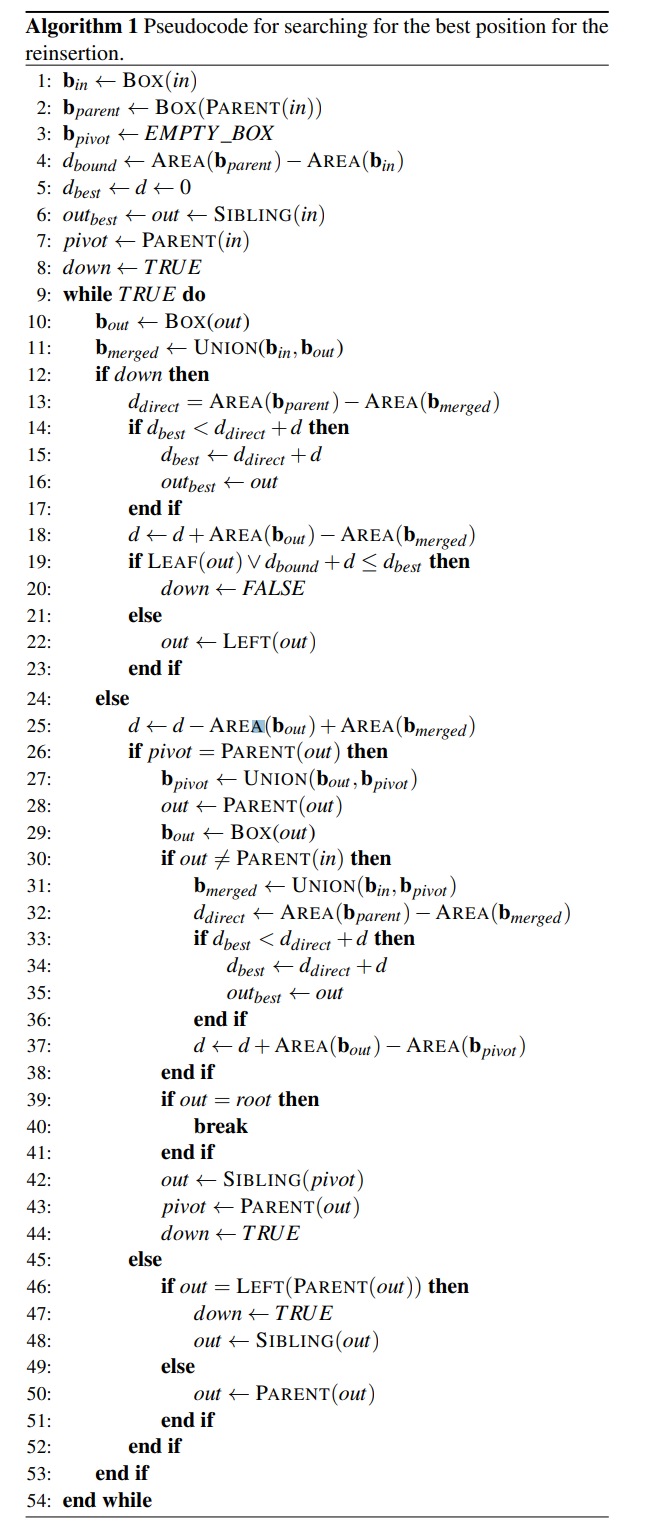
算法细节
- demo
- 初始化的最优 out 节点就是 in 节点的兄弟节点
- decrease=0
- \(d_{bound}\):整条路径的 SA
减小的上界
- 就是对 \(d_{direct}\) 上界的估计
- \(\mathbf{b}_{pivot}\):去掉 in
节点之后的 pivot 的包围盒
- \(\mathbf{b}_{pivot}\) 的计算:pivot 的右子节点的包围盒和 \(\mathbf{b}_{pivot}\) 的并集
- 用于累计计算路径上 SA 的减小
- 有些在算法运行过程中不变的量
- \(\mathbf{b}_{parent},d_{bound}\)
- 整体是一个前序遍历的算法
- \(d\) 是进入到新的节点之后才被更新
down=True
down=True
\(d\):搜索到当前 out 节点为止,路径上的 SA 减少值
- 粉红色路径的 SA 减小值
- 这里的更新是更新粉红色路径最后的节点的
SA,相当于在原来的子树内插入了 in 节点
- 减少值就是 \(SA(\mathbf{b}_{out})-SA(\mathbf{b}_{merge})\)
\(d_{direct}\):紫色路径(蓝色节点)的 SA 减小值(原来是 in 的父节点)
- 因此这里的更新使用 \(SA(\mathbf{b}_{parent})-SA(\mathbf{b}_{merge})\)
剪枝:由于 \(d\) 在 down=True 的遍历过程中是不增的
- \(d_{max}\le d\)(\(d\) 表示当前计算得到的 \(d\))
\[ \begin{aligned} d_{may\_be\_best} &=d_{max}+d_{direct}\\ &\le d+d_{direct}\\ &= d+SA(\mathbf{b}_{parent})-SA(\mathbf{b}_{merged})\\ &\le d+d_{bound} \end{aligned} \]
down 的更新
- 剪枝向上回溯
- 如果没有左子节点,则向上回溯
down=False
- 首先更新 \(d\):去除最后一个结点的减小值
- 两种情况分类讨论:子树的前序遍历完成、还处于前序遍历的 up-phase
- 遍历完成
- 更新 pivot 的包围盒值
- 原来的 pivot 的包围盒记录的是 pivot 左子树的包围盒
- 因为 in 插入到 pivot 子树中时,pivot 的 SA 变化为 0,不影响 \(d\) 的计算
- 不包含 in 节点
- 原来的 pivot 的包围盒记录的是 pivot 左子树的包围盒
- 27-29:out=pivot
- 33-36:in 节点不能插入到父节点位置,除了父节点,都需要进行尝试
- 更新 \(d\):pivot 减去 in 节点 SA 减小了多少
- 42-44:对兄弟子树进行遍历
- 更新 pivot 的包围盒值
- up-phase
- 从左子节点上来,则继续遍历右子节点
- 从右子节点上来,则继续向上
Parallel Reinsertion
- 解决可能存在的冲突问题
- 两种冲突
- topological conflicts
- path conflicts
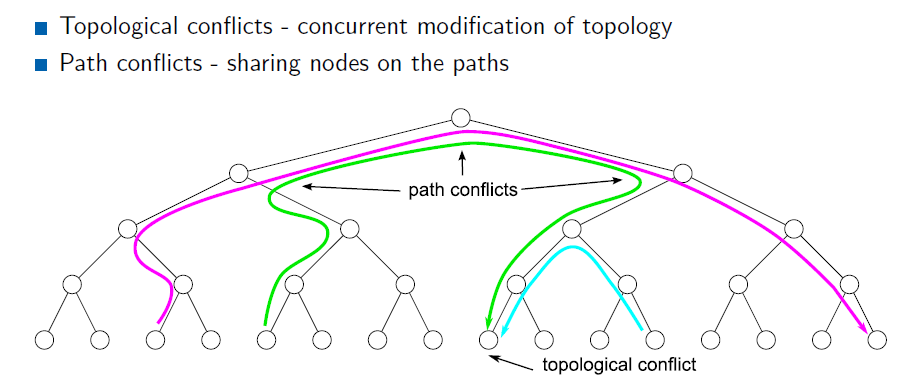
- 当发生冲突的时候,丢弃优先级小的
- topological conflicts:同时修改树结构
- 并发操作加锁,SA 减小更多的优先操作
- 锁定影响到的节点
- path conflicts:同时修改 BVH
- 锁定路径上的所有节点
Locking Strategy
- 保守的:path+topological 都加锁
- 一定能够保证 SA 减少的总量和所有成功加锁的 path 的 SA 减少之和相等
- 激进的:topological 加锁
- 不能保证总量和分量之和想的相等(可能多、少、相等)
- 实验表明,收敛更快
激进策略分析
- 对于一个 AABB 包围盒来说,决定这个包围盒的内部包围盒最多只有 6
个(一个面一个)
- 如果有两个包围盒决定了同一个面,选择一个即可
移除
- 不同节点的内部节点移除
- 只有决定了包围盒的面的节点移除才会有 positive SA decrease
- 如果和其它节点共同决定一个面,那么移除这个节点对这个面,SA 无变化
- 不决定面,则 SA 无变化
- 同时对有 positive SA decrease
的节点进行移除,可能会导致总的减少比部分减少之和要小
- 例如移除决定相邻的面的两个节点
- 下图中的 1、2、3,虚线方框部分的在总的减少中只会被计算一次
- 例如移除决定相邻的面的两个节点
- 同时移除也可能导致总的减少比部分减少要大
- 决定面的节点的移除,使得本身不决定 bvh 面的节点决定面
- 下图中的 4、5,本身不决定 bvh 面的节点变成决定面
- 决定面的节点的移除,使得本身不决定 bvh 面的节点决定面

插入
- 插入的时候也有类似的问题,本身所有的节点插入,都会有 negative SA decrease
- 总的增加 < 分量增加之和
- 1、2、3:图 3 的右下角虚线黑框只会被总的计算一次
- 5:内部有些红色节点的插入本身会导致 SA 增加,但是现在不会了
- 总的增加 > 分量增加之和
- 3、4:一开始最左边红色块的插入不需要计算图 4 的两个黑色虚线黑框内的部分

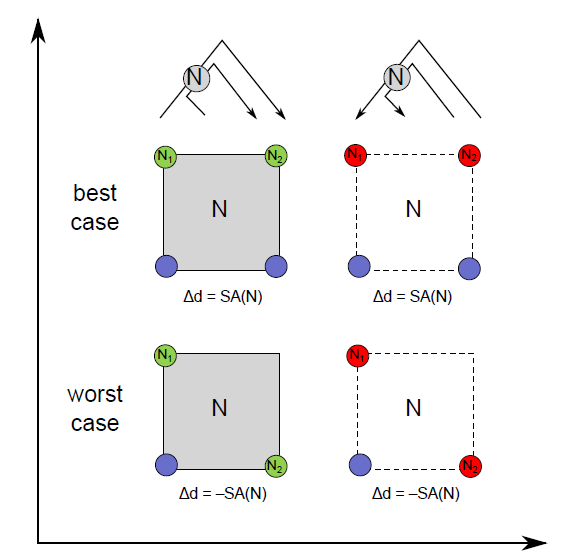
最好最坏情况分析
- two path analysis
- 移除(下图中的绿色节点移除)
- 最好:单个移除不影响 bvh,两个一起移除 SA \(\to\) 0
- 最差:单个移除 SA \(\to\) 0
- 插入(下图中的红色节点插入)
- 最好:单个插入 SA 的增加和两个插入一样
- 最差:单个插入 SA 的增加都为 0,但是两个插入让其变大
- 红色为点(退化的 bvh)
- 为什么激进策略更好呢?
- 锁住的节点少,在一次迭代能够有更多操作同时进行(throughput)
- 一开始的时候,positive SA decrease 比 negative SA decrease 更多,因此总的效果来说是更好的
- 大量移除的节点都是不决定原来的 bvh 的
- 可能会有更多的 SA decrease,在移除其他节点之后决定了 bvh
- 大量插入的节点都是不决定最终的 bvh 的(不会导致 SA increase)
完整算法
- sparse search
- 算法瓶颈是在查找 search phase
- 相邻的节点搜索得到的路径引起冲突的可能性比较大,因此同一轮的搜索中,相邻的几个节点我们尽量只搜索少量几个
- 只有满足如下式子的 \(i\) 才进行搜索,\(I\) 表示迭代轮数,\(\mu\in\{4,\cdots,9\}\)
\[ I(\mod\mu)\equiv i(\mod\mu) \]
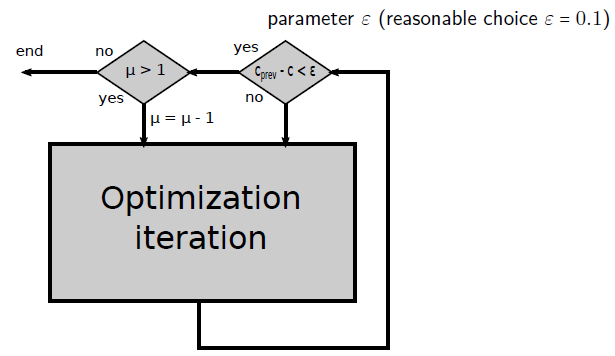
- 终止条件
- 两次迭代的 SA cost 差异小于 \(\epsilon\)
- 实验值:\(\epsilon=0.1\)
- GPU 实现
- Find the best node
- Lock nodes
- Check locks
- Reinsert
- Recompute bounding boxes
- Compute the SAH cost
TRBVH
- treelet restructuring
- treelet:small subtrees of a fixed size
- 基本思想是重构树形结构
- 每次使用动态规划的方式重构一个 treelet
- bottom-up
- 改进
- 使用 agglomerative clustering(聚集方法)代替动态规划,能够处理更大的 treelet