(论文)[2021] A Survey on Bounding Volume Hierarchies for Ray Tracing(3)
BVH Survey
4. construct bvh
4.3. Incremental Construction
- 论文:Automatic Creation of Object Hierarchies for Ray Tracing
- 在插入的时候增量更新
- 初始的时候为一个人空的 BVH,当插入新物体的时候,找到一个合适的叶子节点进行插入,如果插入之后节点过大则进行分裂
- 在初始的时候不知道场景中所有物体的时候很有用
- e.g., streaming the data through the network
- 质量通常不是很高
- 在另一篇论文中改进了
- Incremental BVH Construction for Ray Tracing
- 以优先队列的方式选择插入场景中的原体,同时贪心的最小化每次插入的代价,结合下面这篇论文的方法,防止插入的时候达到局部最小化
- Fast Insertion-Based Optimization of Bounding Volume Hierarchies
- Incremental BVH Construction for Ray Tracing
4.4 LBVH
- BVH 构建上的并行不是很直观
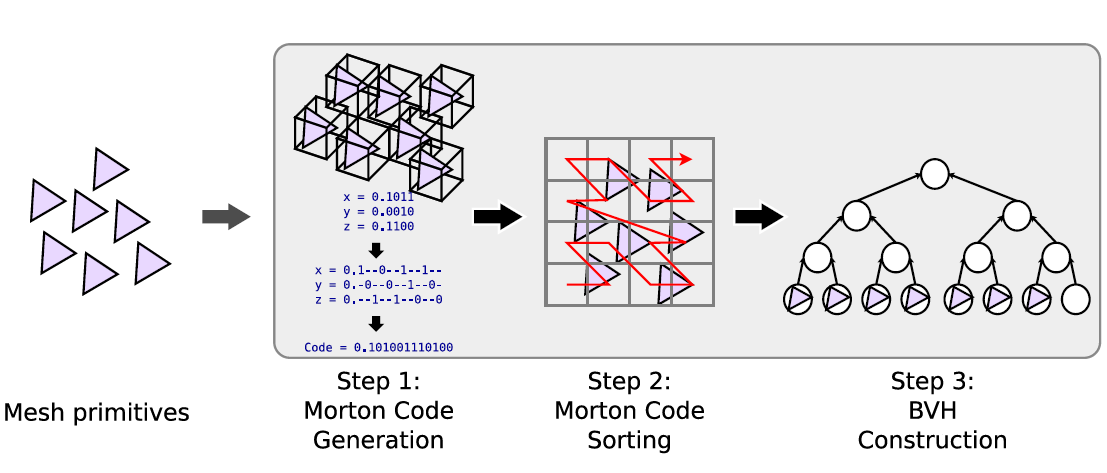
- 归约:BVH 的构建能够被归约为对场景原体在 Morton Curve
上的排序,顺序由定长(32/64bit)的 Morton codes 决定
- 排序则有很多并行算法
- 定长:可以使用基数排序的方式 \(O(n)\) 实现
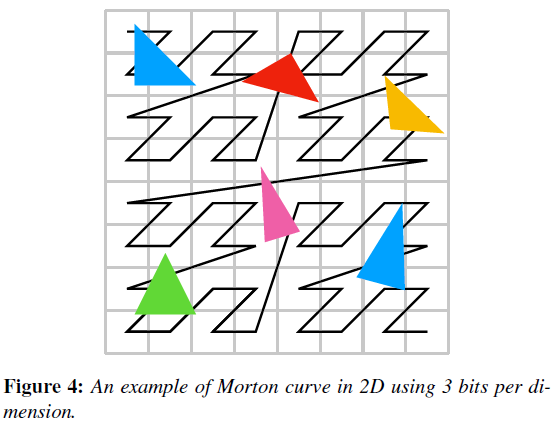
- Morton curve:space-filling curve subdividing space into a uniform
grid
- 每一个小的 grid 都会被分配一个唯一的 morton 码(容易计算)
LBVH
- linear BVH (LBVH)
- 使用 Morton Curve 构建 BVH,GPU-based
- top-down
- 每一个 level 调用一次 kernel
- lower level 的时候使用 SAH binning 算法
- 论文:Fast BVH Construction on GPUs
- 算法整体思路
- linearizing:将输入的原体转化为一个长度为 \(n\) 的定长序列
- 然后我们对所有区间进行递归划分,从而构建起
BVH,每一个节点都对应一段区间
- root:\([0,n)\)
- 每一个 BVH 上的几点就对应 \([l_i.r_i)\) 内的原体
- Morton curve:space filling curve
- 又被称为 Lebesgue curve / z-order curve
- 假设
- 使用 AABB 包围盒
- 每个原体的包围盒都是已知的
- 整个场景的包围盒是已知的
- 使用每个原体的重心表示这个原体
- 将整个场景的包围盒划分为 \(2^k\times2^k\times2^k\) 个格子,于是每一个格子能够使用 3 个 k bit 的整数来表示
- morton code 例子如下图所示
- 拼接,然后构成一个顺序

- 然后根据每一个原体重心的位置为其分配一个 Morton code,根据这个码进行排序
- 按照 Morton code 进行排序得到的结果,能够让相邻的原体在空间位置上也是相邻的
- 一个例子
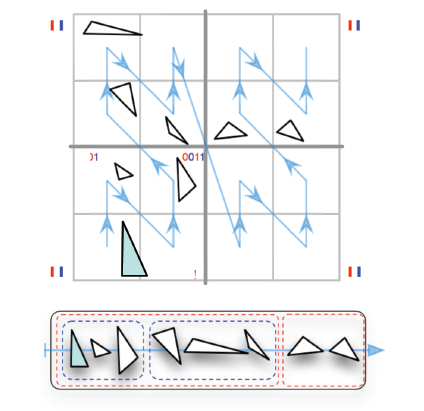
- 构建 BVH
- 从最高位开始,将为 0/1 的原体分别划分到两棵子树内
- 如果全部相同,则看下一位
- 递归处理子树,直到所有位都处理完毕
- 从最高位开始,将为 0/1 的原体分别划分到两棵子树内
- 构造过程等价于 MSD 的 2-基数排序(most-significant-bit radix-2
sort)
- 泛化到 most-significant-bit radix-\(2^b\) sort(每次比较 \(2^b\) 位),则可以构造出 \(2^b\) 叉树
- radix-8:octree
- 并行算法
- 先排序(并行算法),然后从排好序的序列中构建出 BVH
- 排序
- 排序过程中由于高位可能全 0,使用 LSD 效果更好
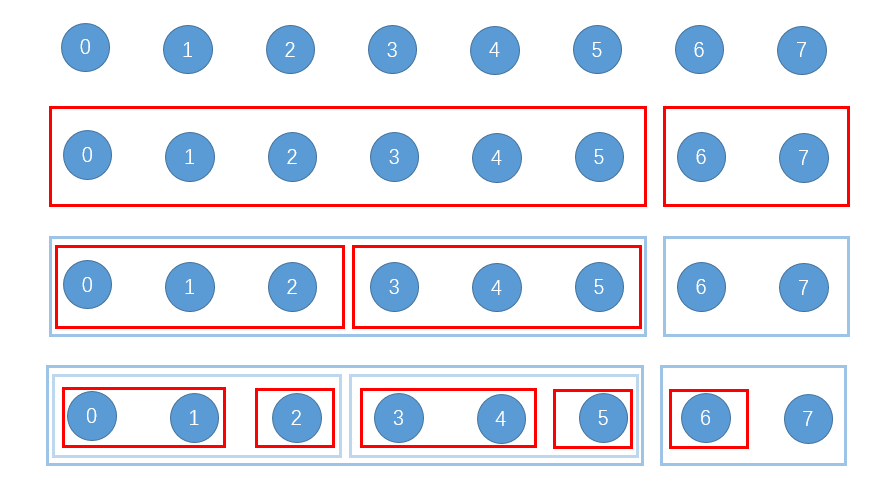
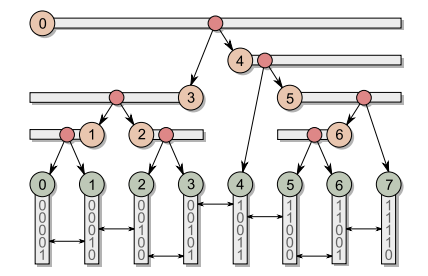
构建
- 每一个 morton code
都表示了一个从根节点到这个原体的唯一路径,他们的包围盒就是最近的公共祖先节点
- 例如:
0000,0001,0011\(\Longrightarrow\)00
- 例如:
- 对每一组相邻的原体 \((i,i+1)\)
做如下处理
- 如果这两个原体,从高位到低数,第 \(h\) 位开始不一样,则它们在第 \(h,h+1,\cdots,3k\) 层将被隔开(处于不同的 BVH)节点中,因此我们记录如下的 pair
\[ \Big[(i,h),(i,h+1),\cdots,(i,3k)\Big] \]
- 我们将所有的 pair 合在一起,并将它们按照第二个关键字排序,则得到了在某一层的分裂信息
- 根据这个分裂信息,进行构建
- 勾结按结果可能存在只有一个儿子的父节点,需要收缩,对每个子结点都向上收缩一遍路径
构建例子
- 所有的 Morton code 如下
1 | 0: 0000 |
- 得到的的 pair 如下
1 | (0, 4) |
- 排序
1 | (5, 1) |
- 构建顺序的示意图如下
- 最后一行划分为单原体的包围盒没有画出来
HLBVH
- hierarchical LBVH
- combine LBVH with SAH sweeping for the upper levels
- 将 sweeping 改进为使用 binning
- 使用 morton code 的前缀作为 bin 的下标
- 引入和很多同步(并行不友好)
加速构建1
- 论文
- Maximizing Parallelism in the Construction of BVHs, Octrees, and k-d Trees
- 一次 kernel 的调用便构建好整棵 BVH
- 之前 LBVH 的构建 level 与 level 之间有相互依赖,这里消除这个依赖
- idea:内部节点和叶子节点放在两个数组里面
- 内部节点的位置和属于该区间的某个端点原体相一致(分裂时的端点)
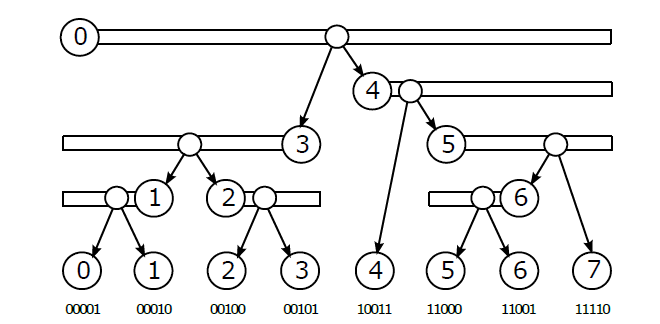
- 加速从排好序的原体中构建出 BVH
- 我们知道一定会有 \(n-1\) 个内部节点
- \(I,L\):内部节点、叶子节点
- 根节点 \(I_0:[0,n-1]\)
- 左子节点 \([0,\gamma]\),右子节点 \([\gamma+1,n-1]\)
- 如何确定 \(\gamma\) ?
- \(\delta(i,j)\):表示 \(k_i,k_j\) 的最长公共前缀的长度
- 如果 \(j\notin[0,n-1]\) 等于 \(-1\)
- 算法:确定节点 \(I_i\)
的左右端点(至少含有两个原体)
- 其中一个端点是确定的,\(k_i\in
I_i\)
- 直观的理解,每一对相邻的节点只会被分裂一次,因此可以有这种规定
- 确定方向,左还是右(那一边公共前缀的长度更长)
- 不存在 \(a<b<c\) 的公共前缀长度相同(二进制表示),否则则有 \(\text{x1,x2,x3}\)(\(\text{x}\) 表示前缀)
- \(I_i\)
内部的最长公共前缀一定要大于 \(\delta(k_i,k_{i-d})\),否则不是分裂点
- 根据这个性质去找另外一个端点
- 找端点,找端点只是为了更新 \(\delta_{node}\) 的值
- 6-8 行,先确定另外一个端点的最大返回
- 倍增尝试
- 10-14 行,找到端点之后,使用二分进行结果的查找
- 原理:\(\delta(a,b)\ge\delta(a,c),a<b<c\)
- 6-8 行,先确定另外一个端点的最大返回
- 接下来确定分裂点(左右子节点)
- 二分查找(分裂点左右两段内部的 \(\delta>\delta_{node}\))
- 其中一个端点是确定的,\(k_i\in
I_i\)
- 结果图
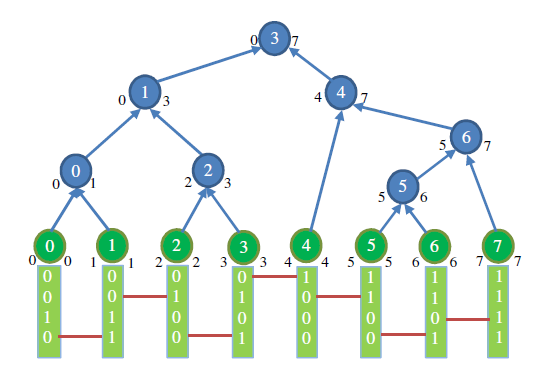
- 伪代码如下
- c++ 代码
- 这里的问题是,这个 pass 只是构建好了 BVH 的拓扑结构,实际上 BVH 中 AABB 包围盒的计算并没有算出来
- 计算 AABB 包围盒
- 每一个叶子节点一个线程,从叶子节点出发向根节点移动计算 AABB 包围盒
- 使用全局的原子计数,记录到达每一个内部节点的线程数,当下一个线程处理到这个节点时,前一个处理过这个节点的线程马上终止
- 每一个节点只会被一个线程同时处理,时间复杂度是 \(O(n)\) 的,同步问题
加速构建2
- 论文
- Fast and Simple Agglomerative LBVH Construction
- 在加速构建1的基础上进行优化
- 一次 kernel 调用便同时构建好拓扑结构和 AABB 包围盒
- 必须是 bottom-up fashion
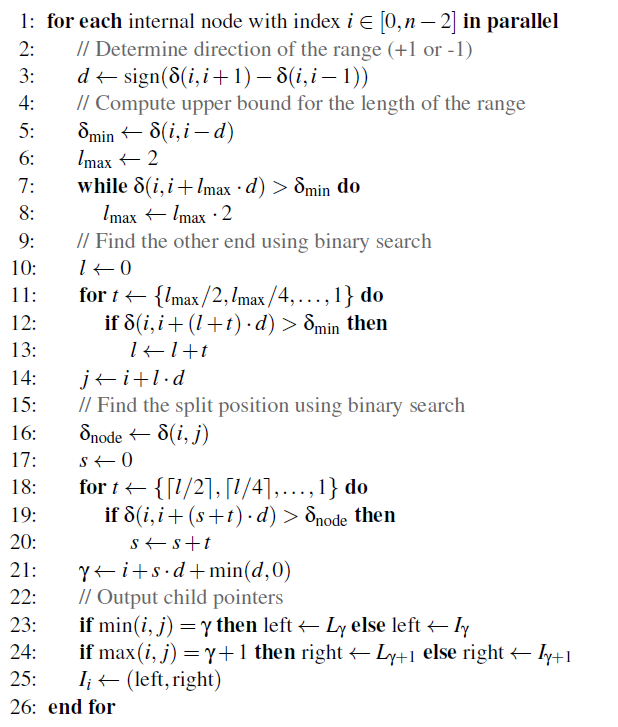
- 使用了另外一种分布方式
- 如果某一个节点覆盖了范围 \([a,b]\) 之间的 keys,那么下标为 \(a-1,b\) 的两个节点都是当前节点的祖先节点,其中有一个为当前节点的父节点
- 定义函数 \(\delta(i)\),表示内部节点 \(i\) 覆盖的 keys 的最不同位的下标
- 例如节点 \(i\) 包含的 keys 为
0010,0011,0100,0101,\(\delta(i)=2\) - 于是如果 x 节点是 y 节点的祖先节点的话,就有 \(\delta(x)>\delta(y)\)
- 根据这个性质,我们可以判断 \(\delta(a-1),\delta(b)\) 的大小关系,来选择父节点
- 实际实现可以使用两端点的 key 异或实现(偏序关系是一致的)
- 例如节点 \(i\) 包含的 keys 为
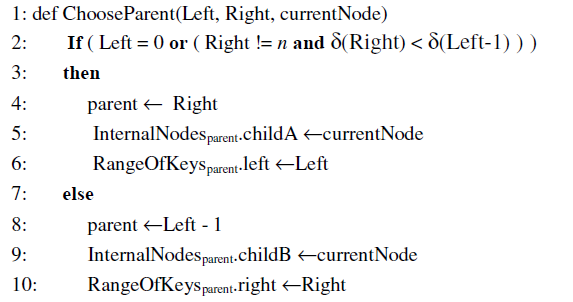
- 如何计算 \(\delta(i)\)
1 | // delta function in sec3 of the paper |
- 为什么可以这么做呢?
- 上面的红线其实就表示了这两个节点在哪一层会被连接
- \(i\) 号内部节点一定包含叶子节点 \(i\)
- 因此这就成了判断:是 \(i\)
号节点会先被加进来合并还是 \(j\)
号节点会先被加进来合并
- 同时一个内部节点必然包含至少两个 key
- 上面的计算其实就是算出了红线的位置
- 可以这么理解,内部节点 \(i\)
的子节点必然是 \([x,i),[i,y)\)
- 这样就可以理解上面的计算了
- 哪边差异小,哪边就会先被连接
- 这么理解的话,内部节点的标号也就是肯定的了(不会有冲突),因为每一个相邻的位置只会被分裂一次
- 这样就可以理解上面的计算了
- 构建包围盒的算法和加速构建1一致
- 感觉这里的优化似乎是省掉了加速构建1中的拓扑结构生成部分,把拓扑结构生成直接集成到构建包围盒中
其他优化1
- 内存优化,紧凑表示,无冗余表达(指针)
- This algorithm is the fastest construction algorithm to date.
- pipeline
- ostensibly-implicit layout
- 能够快速检测得到二叉树中的缺失部分,能让排布更紧凑
- 只需要保存包围盒的信息,其他信息都能够推断出来(不需要保存)
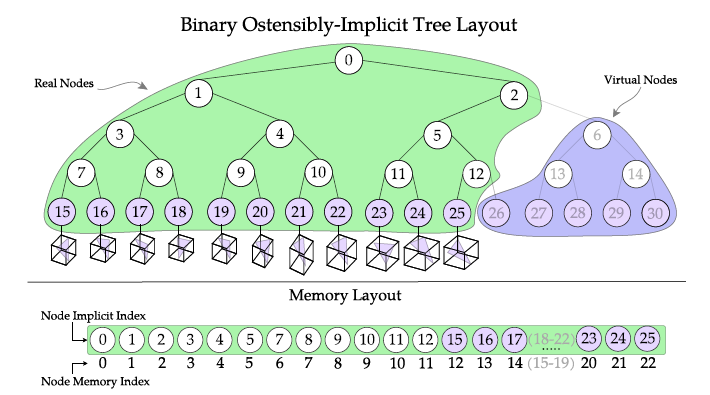
ostensibly-implicit layout
- 数据结构
- 完全二叉树:需要引入虚拟节点
- 堆结构:需要预处理,需要存储指针数据
- ostensibly-implicit layout:不需要存储指针(多余的数据),同时不需要预处理
- idea:构造一棵隐式的完全二叉树,把虚拟节点都放在最右边,然后编码一系列的小的完全二叉树
- 物体个数为 \(t\)
- 最深的一层需要引入的虚拟节点的个数 \(L_v=2^{\lceil \log_2t\rceil}-t\)
- 最深的一层总共的叶子结点数 \(L_c=t+L_v=2^{\lceil \log_2t\rceil}\)
- 因此树上总结点数 \(N_c=2L_c-1\)
- \(N_c=N_r+N_v\)
- \(N_v\):virtual node(树上的虚拟节点总数)
- \(N_r\):real node(树上真实的节点的总数)
- \(L_v\) 可以表示成 2
的幂次方的和,定义如下集合
- \(N\) 应该和二进制表示中 \(1\) 的个数相等

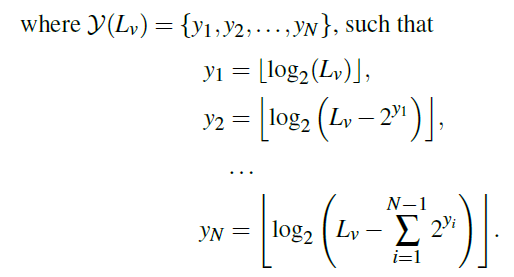
- \(N_v\) 和 \(L_v\) 有如下关系
- 叶子数为 \(x_k=2^{y_k}\) 构成的完全二叉树的总结点数为 \(2x_k-1\)
- 参考上图中的紫色部分,从右往左
- 4(27,28,29,30)向上形成一棵完全二叉树
- 1(26)又向上形成一棵完全二叉树
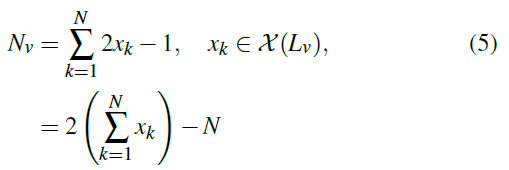
- \(count\_set\underline\_bits(X)\) 表示计数 \(X\) 的二进制表示中 \(1\) 的个数
- 上面的式子 (5) 表示如下
\[ N_v=2L_v-count\_set\_bits(L_v) \]
- 更新
\[ \begin{aligned} N_r &=N_c-N_v\\ &=(2L_c-1)-(2L_v-count\_set\_bits(L_v))\\ &=2t-1-count\_set\_bits(L_v) \end{aligned} \]
建立映射
- 一个真实的节点,假设它对应的虚拟节点下标为 \(i\)
- 虚拟节点深度 \(l_i=\log_2(i+1)\),\(0\le l_i\le \bar{l}=\lceil{\log_2t}\rceil\)
- 位于深度 \(l\) 的虚拟节点个数如下
\[ L_{vl}=\left\lfloor{\dfrac{L_v}{2^{\bar{l}-l}}}\right\rfloor=L_v\gg(\bar{l}-l) \]
- 因此这个节点在内存中的位置 \(i_m\)

- \(N_{vl}\) 的计算如上面提到的一样
\[ N_{vl}=2L_{vl}-count\_set\_bits(L_{vl}) \]
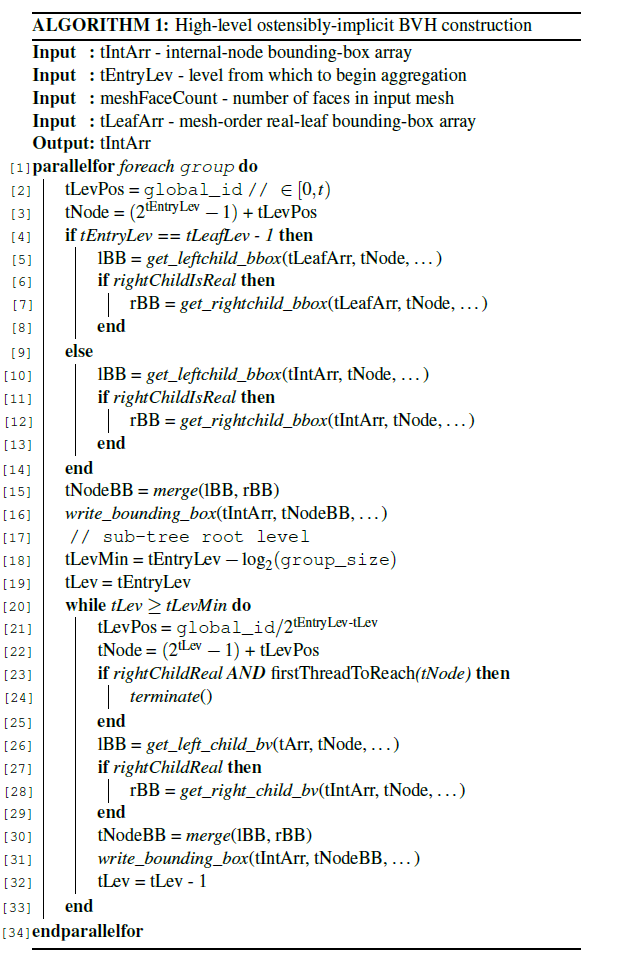
建立 BVH 算法
- 我们获取到的是按照 Morton code 排序之后的原体序列
- 内部节点和叶子节点分开存储
- 叶子节点的包围盒可以提前知道,之前已经算出来了
- [3] tNode:上面提到的 \(j\)
- 需要通过上面 \(eq(9)\) 的计算,得到真实的内存地址
- [23,24] 为了同步,第一个到达当前结点的线程不操作(和之前的优化方法类似)
- 一个别人代码的实现
- 评价:质量可能不是很高,但是 BVH 构建很快,而且内存占用少(指针隐式表示)
其他优化2
- 扩展了 Morton code,同时将场景中原体的大小编码进去了,能够提升 BVH 的质量