(论文)[2021] A Survey on Bounding Volume Hierarchies for Ray Tracing(2)
BVH Survey
4. construct bvh
4.1 Top-Down Construction
- 借鉴 KD-tree 的建立过程
- On Fast Construction of SAH-based Bounding Volume Hierarchies.
- 算法
- 根节点包含场景中所有的原体
- 从根节点开始,将包含的原体划分为两个不相交的子集(对应两个子节点)
- 对子节点做递归的操作,直到遇到终止条件
- 终止条件
- 节点中包含的最大原体数目(叶子节点)
- 最大树深度
- 最大使用内存
- 问题:划分为两个子集的方式很多,是指数级别的(NPC)
- Object partitioning considered harmful: space subdivision for BVHs
- AABB 包围盒 \(O(n^6)\) 的方法
- 进一步可以利用 grid approximation 控制时间复杂度,同时受限于 grid 的分辨率,可能只是个局部最优
- Object partitioning considered harmful: space subdivision for BVHs
- BVH 中,每一个原体只会被引用一次
- 引入空间划分放宽这个限制(section 5.1)
- 实际操作中,每一次的划分我们都使用一个轴对齐的平面(axis-aligned
plane)
- 对于场景的原体,我们使用一个点来代替
- 可以是包围盒的中心
- 这个点只会在选择平面的一侧
- 对于场景的原体,我们使用一个点来代替
- 划分轴
- 首先我们选择一个轴(xyz)
- 测试 3 个轴,选出最好的
- 启发式算法:round-robin,最长的轴
- rr:根据轴的长度依概率选择划分轴
- 首先我们选择一个轴(xyz)
- 划分平面
- 选择划分平面的 3 种基本方式
- 恰好把包围盒空间划分为两半:spatial median split
- 恰好把原体数目换分为两半:object median split
- 实用
- 损失函数:split based on a cost model
- 试图求得代价函数的局部最优解
- 因为我们在划分之前无法准确的知道子结点的代价(cost)
- 我们将子节点都当作叶子节点进行估计
- 选择划分平面的 3 种基本方式

- 推导
\[ \begin{aligned} c(N) &=c(N)^{SAH}\\ &=c_T+\sum_{N_c}\dfrac{SA(N_c)}{SA(N)}c(N_c)\\ &\approx\hat{c}(N)^{SAH}\\ &=c_T+c_I\sum_{N_c}\dfrac{SA(N_c)}{SA(N)}\vert N_c\vert\\ \end{aligned} \]
- 我们也可以把这个当作终止条件的判断标准,如果 \(c_I\vert N\vert\le \hat{c}(N)\) 则停止划分
- 也就是说,如果把当前节点当作叶子节点的代价比继续划分更小,则停止划分
- 损失函数加上一项,希望子节点的 BVH 重合更少
- \(V(N)\):节点 \(N\) 的包围盒的体积
- \(c_O\):常数
- 很直观,就是重合的比例越小越好

- 这样的损失函数比 EPO 更容易实现,与渲染相关性小,在 BVH 构建的时候便很容易计算
- 以下介绍一些寻找划分平面的算法
sweeping
- 选择划分平面的时候,依次测试所有的可能平面
- \(N-1\) 个在原体之间的平面
- 计算代价很大,尤其是在算法开始的时候,节点包含的原体数目很多
binning
- 将待划分的轴空间平均的划分为 \(b\) 个区间
- 将所有原体映射到 \(b\) 个区间内部
- 现在我们只需要在这 \(b-1\) 个平面上测试损失函数即可
- 实验表明,一个较小的 \(b(16/32)\)
效果也不错
- 加速了 bvh 的构建
- 求交的加速效果和 sweeping 方式差不多
- 随着深度变深,可以使用更少数量的 bin
binning 并行
两种并行方式:horizontal parallelization \(\to\) vertical parallelization
深度较小:horizontal parallelization(感觉本质上就是并行的桶排序)
少量的内部节点,但是都包含大量的原体
场景的原体被均等分配给不同的线程(\(0\sim T-1\))
对于每一个线程,将自己的原体映射到 bin 中(\(0\sim B-1\))
- 可能存在不同的线程中的原体映射到相同的
bin,因此我们让每个线程新包含一个私有的 bin set,最后做完之后在进行合并
- 合并过程如下
- 同时每一个线程 \(t\) 计算 \(N_{L,i,t},N_{R,i,t}\)
- \(N_{L,i,t}\) 表示对于线程 \(t\) 分到的原体,位于第 \(i\) 个 bin 左边(包含 \(i\) )的原体数目
- 可能存在不同的线程中的原体映射到相同的
bin,因此我们让每个线程新包含一个私有的 bin set,最后做完之后在进行合并
做完之后,计算得到 \(t\) 个前缀和 \(N_{L,i}^{t}\)(对所有线程 \(1\sim t\) 求和)
此时每一个线程再扫描一遍它的所有原体,将原体对应的 ID 写到原始的三角形列表中
- offset 可以从前缀中得到,例如线程 \(t\) 中有 \(a\) 个落在第 \(m\) 个 bin 中,那么这 \(a\) 个原体对应的在三角形列表中的偏移就是如下
\[ \begin{aligned} &\Big[N_{L,m-1,T-1}+N_{L,m,t-1}, N_{L,m-1,T-1}+N_{L,m,t-1}+a\Big)\\ =&\Big[N_{L,m-1,T-1}+N_{L,m,t-1},N_{L,m-1,T-1}+N_{L,m,t}\Big) \end{aligned} \]
遍历所有的平面,计算最佳划分平面
深度较大:vertical parallelization
- 子树数量和线程数目相当
- 每一棵子树分配给一个线程
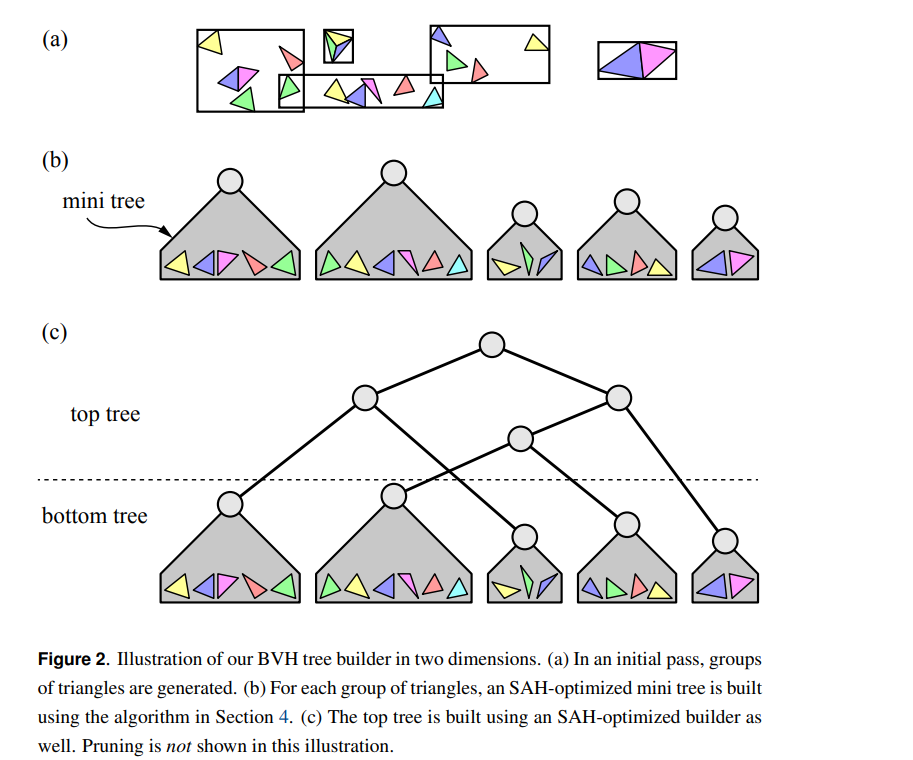
Bonsai 算法
- Bonsai: Rapid Bounding Volume Hierarchy Generation using Mini Trees
- 算法
- 首先利用 spatial median split 的方式,将所有的三角形划分为若干个相邻的区域(cluster)
- 对于每一个区域建立一个 mini-tree,mini-tree 使用 sweeping 的方式建立
- 之后,将这些区域都看成叶子节点,建立上层的 BVH
- 论文还提出了剪枝优化
PHR 算法
- progressive hierarchical refinement (PHR)
- Parallel BVH Construction Using Progressive Hierarchical Refinement
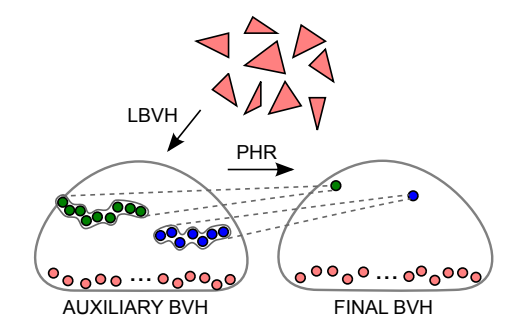
- 算法
- 首先按照某种方式建立起 BVH(论文是 LBVH)
- 找到一个 cut(一组节点,这组节点能够将根节点和所有叶子节点分开)
- 要求这个 cut 满足如下性质
- 包含的树上的节点数量最少
- 表面积之和小于一个设定的阈值
- 对这个 cut,将其划分为两个集合
- 遍历 3 个轴,使用 sweeping 算法得到最好的划分平面
- 算的很快,因为节点数目和场景中的原体数目相比很小
- 此时我们得到两个新的 cut(此时我们建立起了一个两层的 bvh)
- 对这两个 cut 构建子树(把 cut
内部节点的所有子节点都挂到这个节点上形成一棵树),重复上面的算法(找
cut)
- 阈值会根据细分的次数进行更新

其他算法
- 更好的近似 EPO 代价函数
- a parallel on-demand construction on the GPU
- 只构建在遍历过程中可能经过的部分
- 随机采样划分平面
- Automatic Bounding Volume Hierarchy Generation Using Stochastic Search Methods
- GPU-based
- binning
- uniform grids of various resolutions to accelerate binning on GPUs
- 其他的 binning 算法
- 根据节点的大小进行分类(而不是位置)
- 利用 k-means 的方式构造 BVH,形成 k-分叉的 BVH,然后再聚合
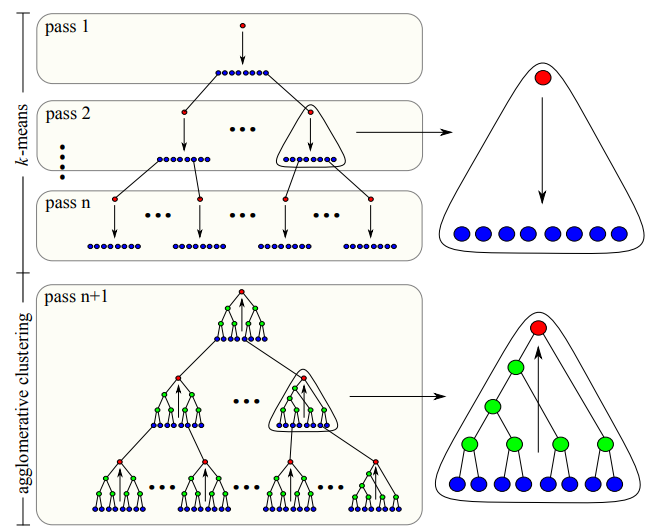
4.2. Bottom-Up Construction
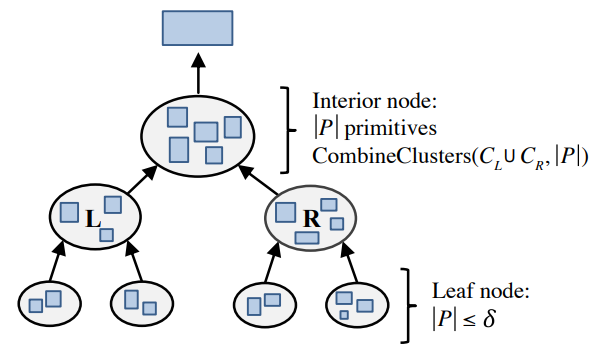
- 聚合算法
- 最早提出:Fast Agglomerative Clustering for Rendering
- 基本思路
- 初始的时候,所有的原体都被当做是 clusters
- 每轮迭代的时候,最近的两个 cluster 会被合并
- 距离函数:将两个 cluster 都包含的包围盒的表面积
- 反复迭代,直至只剩下一个 cluster
- 一般而言效果好,但是时间开销极大
- 从算法来看,很容易看出这里的优化主要集中在 bottom 的部分
- 可能导致 top 部分的优化很差
- 优化的难点:每次迭代都需要对每一个点找最近邻
- the nearest neighbor search has to be performed for each cluster to determine the closest cluster pair in each iteration
堆与 kd-tree
- 论文:Fast Agglomerative Clustering for Rendering
- 数据结构
- 堆:以距离为优先级函数保存最近邻
- 辅助的 kd-tree:加速最近邻的查找
- 伪代码如下
1 | KDTree kd = new KDTree(InputPoints); |
- 不太容易并行,kd-tree 在合并的过程中会被更新
AAC
- approximate agglomerative clustering (AAC)
- Efficient BVH Construction via Approximate Agglomerative Clustering
- idea:利用 Morton curve 来限制最近邻搜索的区域
- Morton curve,section 4.4
- 首先,场景中的原体按照 spatial median splits based on Morton codes 的分割方式进行分割,直到每一棵子树包含的 cluster 数目都小于预先设定的一个值
- 在每一棵子树中对 cluster 进行合并
- 利用聚合算法进行合并,直到数量比较小(可以不是 1)
- 此时对还没有合并的 cluster 进行合并
- 不是所有的 cluster 都放到一起合并,cluster 数目都小于预先设定的一个值,会先分成多个
- 反复合并,直到树构建完成
- 每一次合并,为了加速最近邻的查找,使用一个距离矩阵(\(n^2\))进行 cache
- 因为每次合并只有少量的距离会被影响
PLOC
- AAC 一开始划分的时候,栈深度较大(导致距离矩阵大), GPU 不友好
- parallel locally-ordered clustering(PLOC)
- GPU-based
- idea:距离函数是非减的
- 如果两个 cluster 的最近邻是相互对应的,那么就可以马上合并
- 这带来了并行的可能,一次合并所有互相对应的 cluster pair
- cluster 保持在 Morton curve 上的有序性,每次查找最近邻,只查找旁边指定数量的邻居(不需要其他的数据结构,例如距离矩阵)
- 算法
- 使用 Morton curve 找到每一个 cluster 的最近邻
- 合并所有的互相是最近邻的节点
- 移除这些节点,并且将合并后的新节点放到第一个节点原来的位置
- 使用 parallel prefix scan 的方式移除缺失的部分
- 一般而言,少量几次迭代便能构建出 BVH