GAMES103.王华民.08.Linear Finite Element Method II(2)
有限元模拟
Hyperelastic Models
- 之前使用的 Stvk 模型存在很多局限性
- 不能处理反转情况
- 真实材料力学的工程里面 Stvk 模型使用的很少
- 图形学中为了简化,使用的比较多
- 通用模型:Hyperelastic models
- 通过能量密度推出来的
- 如何构造一个从 G 到 S(stress)的映射
- 能量/力与变形过程无关,只与当前时刻的形状有关
- 可以势能描述

各向同性材料
- isotropic material
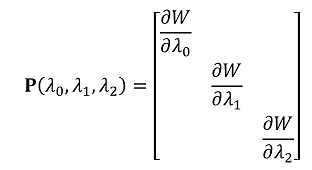
- first piola-kirchhoff stress 是 \(\mathbf{F}\) 的一个函数
\[ \mathbf{P}(\mathbf{F})=\mathbf{P}(\mathbf{UDV^{\text{T}}}) \]
- 对于各向同性的材质来说,可以把旋转项提出来
- F:旋转 + 拉伸 + 旋转

- principal stretches:主拉伸量
- 在论文中常常这样描述 \(\mathbf{P}\)
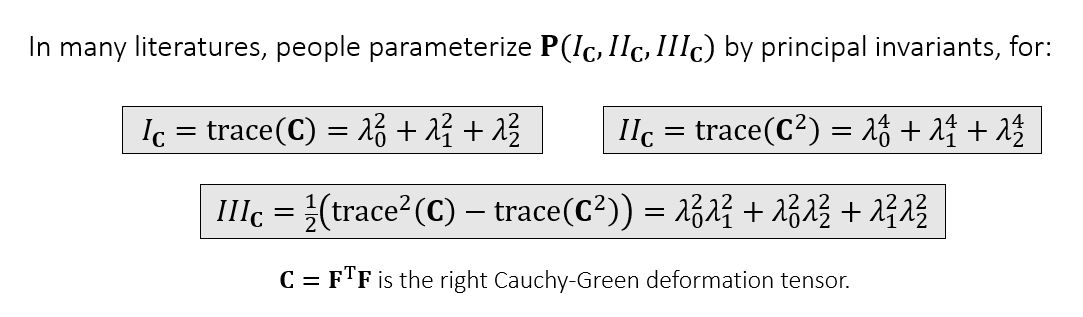
- 然而这里实际上,由于 \(\text{trace}(\mathbf{AB})=\text{trace}(\mathbf{BA})\)
\[ \begin{aligned} \text{trace}(\mathbf{F}^{\text{T}}\mathbf{F}) &=\text{trace}(\mathbf{UDV^{\text{T}}VDU^{\text{T}}})\\ &=\text{trace}(\mathbf{UD^2U^{\text{T}}})\\ &=\text{trace}(\mathbf{U^{\text{T}}UD^2})\\ &=\text{trace}(\mathbf{D^2})\\ \end{aligned} \]
- 类似的还有
\[ \begin{aligned} \text{trace}(\mathbf{C}^2) &=\text{trace}(\mathbf{UD^2U^{\text{T}}UD^2U^{\text{T}}})\\ &=\text{trace}(\mathbf{UD^4U^{\text{T}}})\\ &=\text{trace}(\mathbf{U^{\text{T}}UD^4})\\ &=\text{trace}(\mathbf{D^4})\\ \end{aligned} \]
- 于是不同模型的描述如下
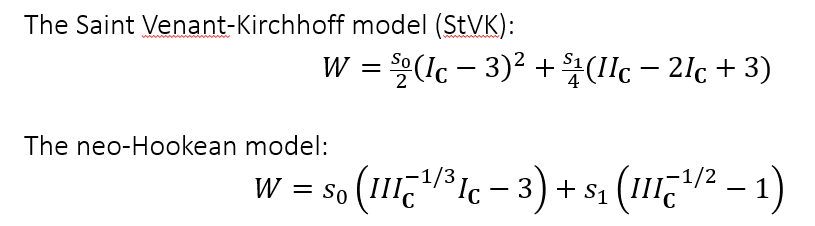
- 注意这里的 stvk 模型
- 之前提到的模型长这样

- 我们可以将其展开,发现 \(\lambda,\mu\) 和 \(s_0,s_1\) 的关系如下(做 lab 3
的时候要注意)
- 证明方式就是把 \(\epsilon_{uu}\) 等直接展开
\[ s_0={\color{red}\dfrac{1}{4}}\lambda,\;s_1=\mu \]
- neo-Hookean 模型在真实的材料力学中使用的更多
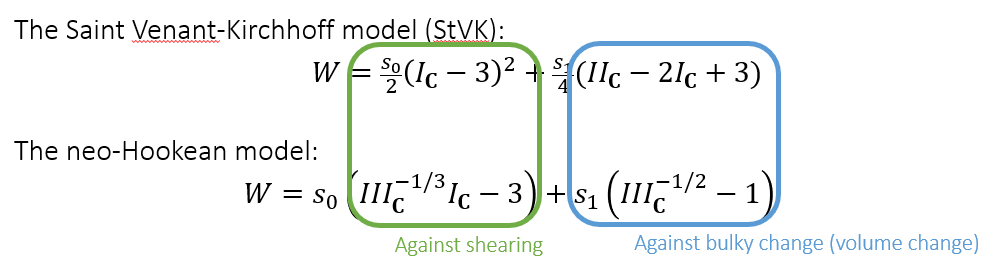
- 这些模型都有两项
- 第一项:抵抗拉伸
- 第二项:阻止体积/面积的改变
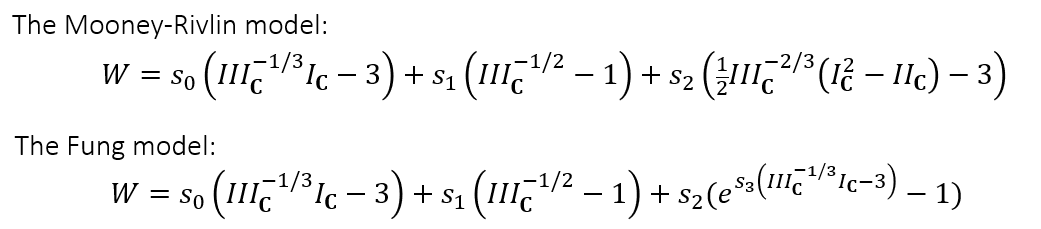
- 其他模型
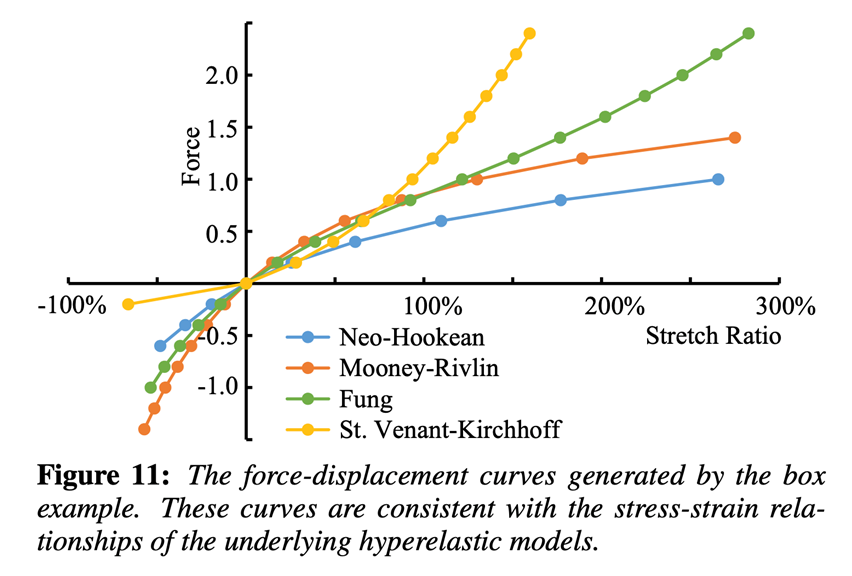
- the Mooney-Rivlin model:neo-Hookean 的增强版、模拟橡胶
- the Fung model:模仿人体组织
- 计算 stress
- 于是对于各向同性的模型,我们可以如下计算
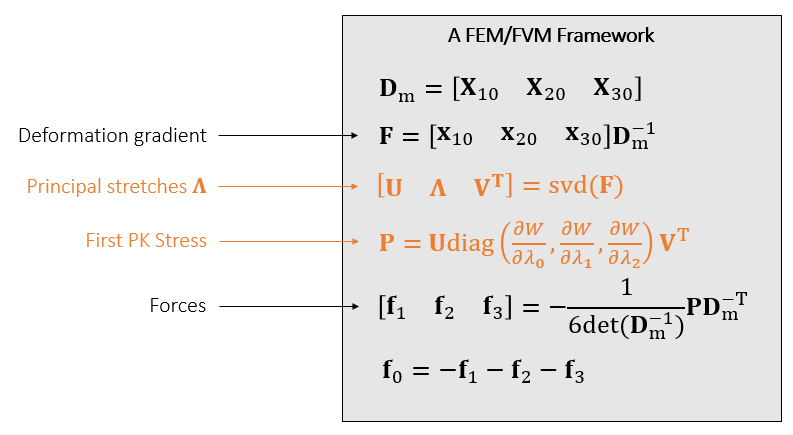
- 对于同样的模型,这种方法和之前的方法计算结果应该是一样的
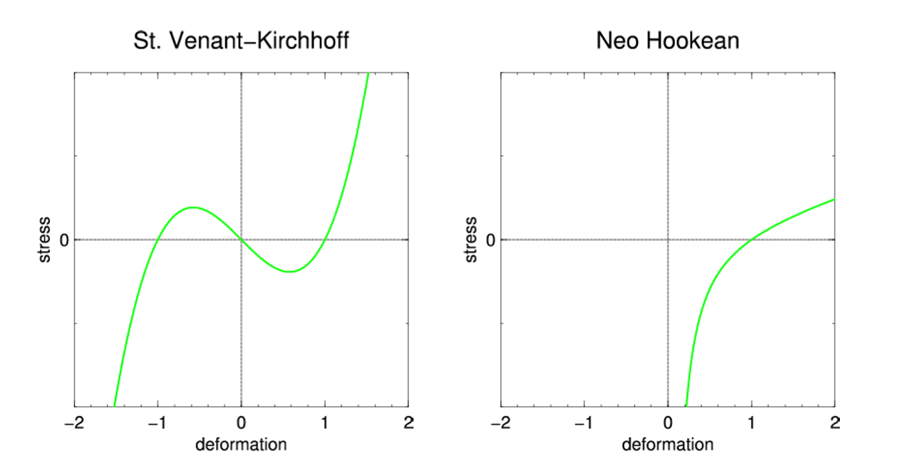
- Stvk 模型的问题可视化
- 压缩的时候,压缩到一定程度之后,抵抗力反而变小了
- 反转之后,不会回到原来的状态,而是反转后的一个平衡状态
- 反转:四面体的一个顶点跑到它所对的面的另一面去
- Irving et al. 2004. Invertible Finite Elements For Robust Simulation of Large Deformation. SCA
- 不同模型的模拟
- Descent Methods for Elastic Body Simulation on the GPU (SIGGRAPH Asia 2016)

- Poisson Effect:物体被拉伸的时候中间会凹进去
- 抵抗体积的改变
Hessian(skip)
- Xu et al. 2015. Nonlinear Material Design Using Principal Stretches. TOG (SIGGRAPH).
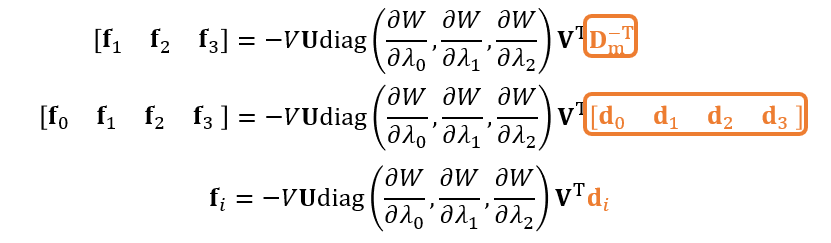
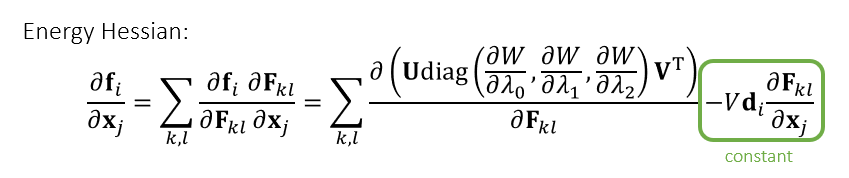
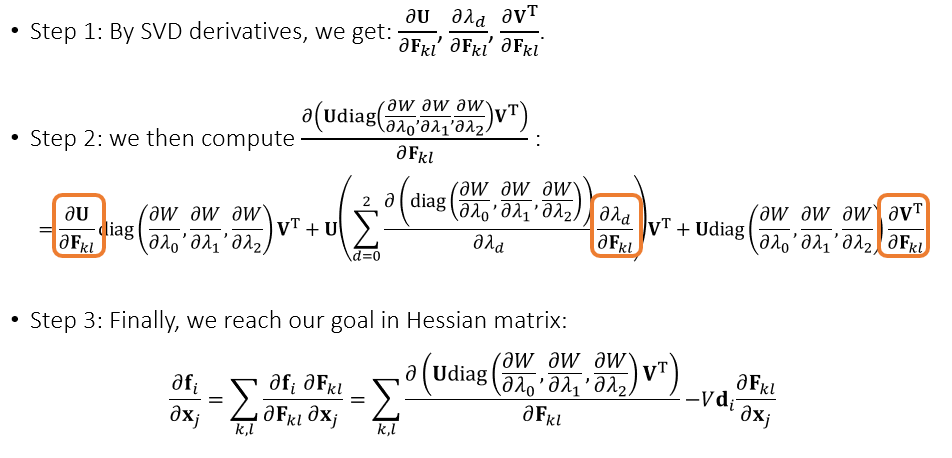
- 计算 Hessian(二阶导)
- 使用 \(\mathbf{d}_i\) 简化表示,\(V\) 表示体积(前面的那个常数)
计算过程
- 绿色部分为常数,可以预计算
拆解
- 链式法则计算剩余部分
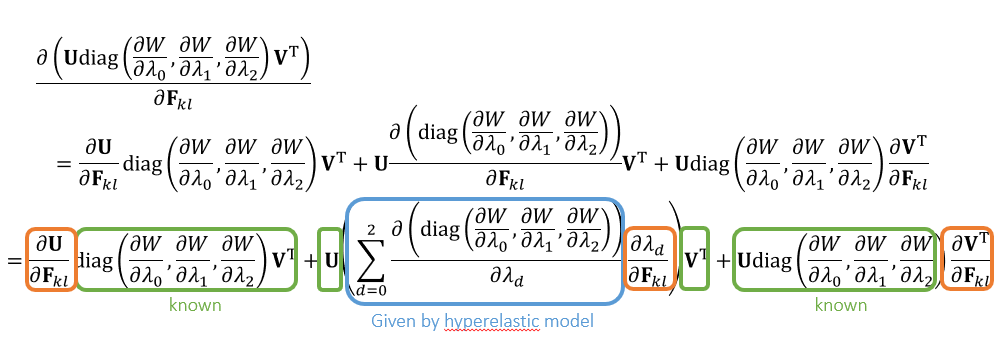
- 此时只有橙色部分需要计算,其他部分现在都能计算
- 利用 SVD 分解定义:\(\mathbf{U},\mathbf{V}\) 为正交矩阵,\(\Lambda\) 为对角矩阵
- \(\mathbf{U}^{\text{T}}\mathbf{U}=\mathbf{I},\mathbf{V}^{\text{T}}\mathbf{V}=\mathbf{I}\)
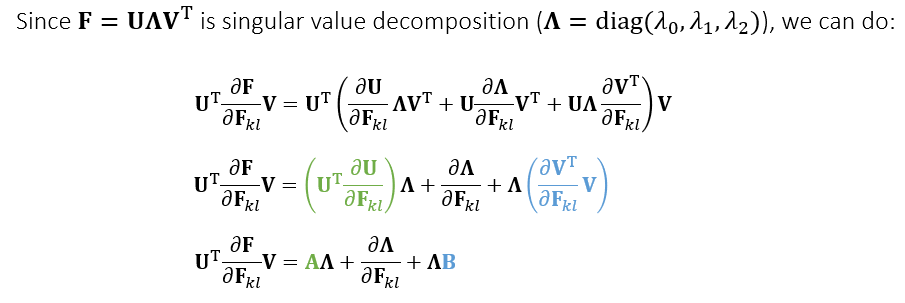
反对称矩阵
- 如下证明 \(\mathbf{A},\mathbf{B}\)
都是反对称矩阵
- 反对称矩阵定义如下:\(\mathbf{M}=-\mathbf{M}^{\text{T}}\)

- 可以由正交性证明

- \(\mathbf{B}\) 同理
反对称矩阵好处

- 反对称矩阵和对角矩阵的乘积矩阵,对角元都为 0
展开求 A 和 B
- 回到上面的式子
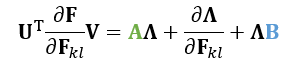
- 根据反对称矩阵展开

- 进一步将其计算出来
- 左边是可以计算的
- 对应项相等,计算得到 \(\mathbf{A},\mathbf{B}\)(6个变量,6个等式)
- 同时计算得到了 \(\dfrac{\partial\lambda_d}{\partial\mathbf{F}_{kl}}\)
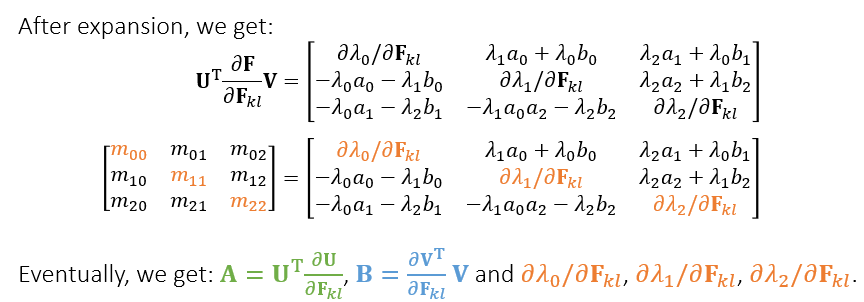
- 此时返回去,可以把需要求的项都计算出来了,于是我们得到了 Hessian
思路
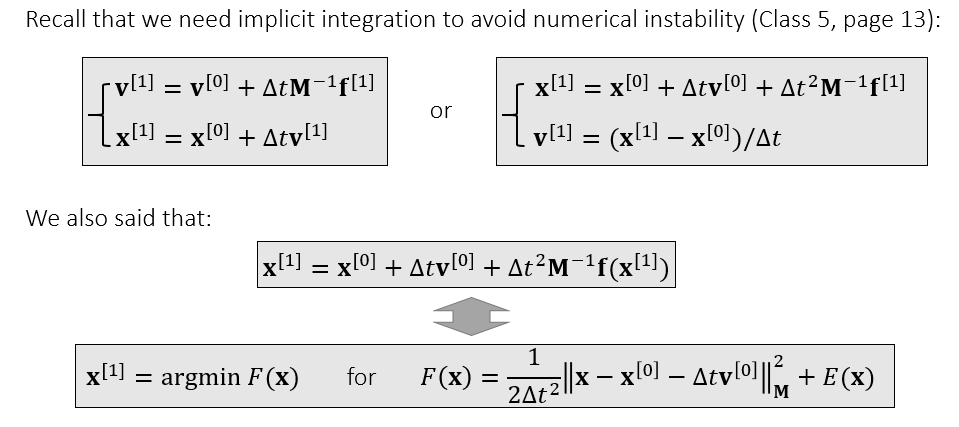
隐式积分(skip)
计算出来 Hessian 之后,思路和之前完全一样
-
- 最上面的式子,单独算则是显式积分(不准确),同时求解 \(\mathbf{v},\mathbf{x}\) 则是隐式积分
- 如果 \(\mathbf{f}\) 仅依赖于 \(\mathbf{x}\),再根据 \(\mathbf{f}(\mathbf{x})=-\nabla E(\mathbf{x})\) ,则转化为下面的式子
- 变成最值问题
- 牛顿法求解
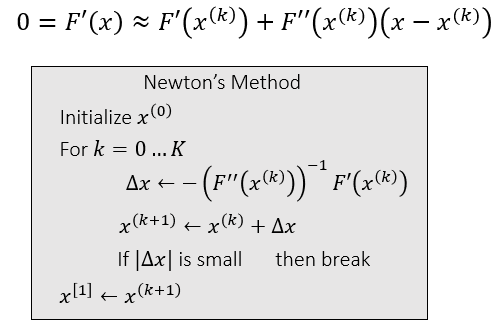
- 代入 Jacobian 和 Hessian

非线性优化
- Nonlinear Optimization
- 现在很多物理模拟都是在做优化,在物理模型上创新不大,基本上都是之前的力学模型
- GPU、CPU 端的优化
- 如何让几万个四面体的模型,在 GPU 上能够进行实时模拟
梯度下降方法
- Gradient Descent
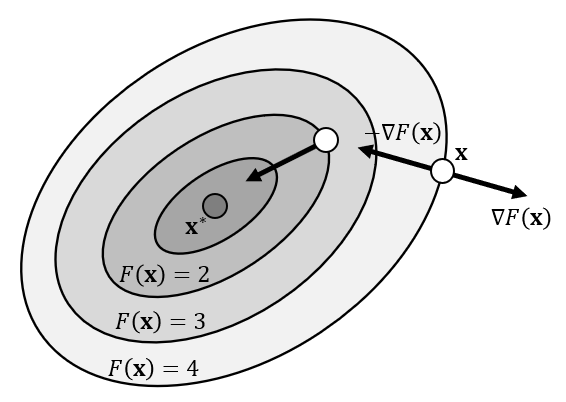
- 算法流程
- 如何找到一个好的步长(step size)是一个困难/重要的问题(critical)
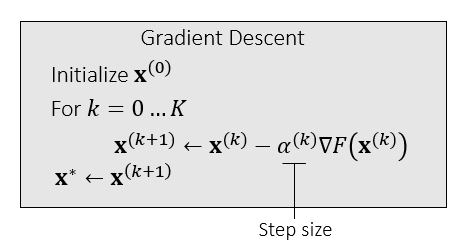
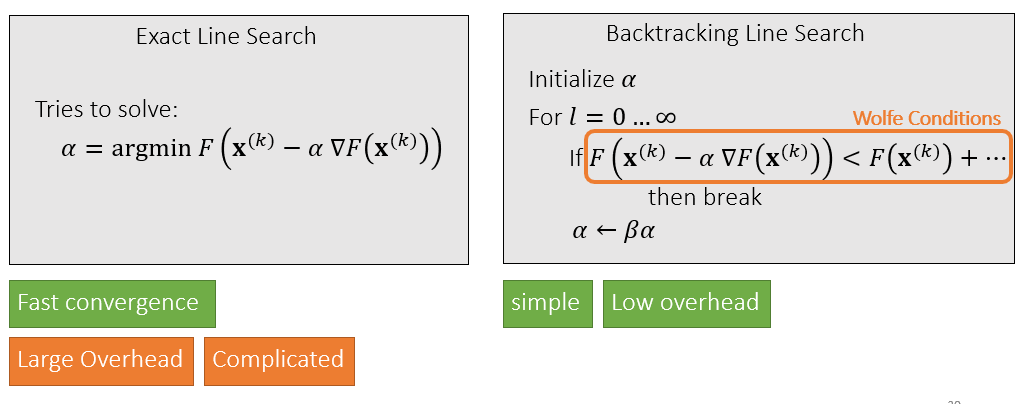
- 精确解(收敛快、计算代价高)
- exact line search
- 近似解(步长尽量大、值要下降)
- backtracking line search
- 精确解(收敛快、计算代价高)
下降方法
- Descent Method
- 负梯度方向不一定是最好的方向
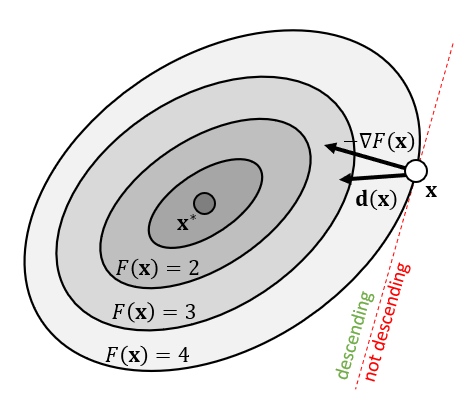
- 如何找到一个能够下降的方向 \(\mathbf{d}(\mathbf{x})\) ?
\[ F(\mathbf{x})>F(\mathbf{x}+\alpha\mathbf{d}(\mathbf{x})) \]
- \(\mathbf{d}(\mathbf{x})\) 和负梯度方向在同侧(点积大于 0)
\[ -\nabla F(\mathbf{x})\mathbf{d}(\mathbf{x})>0 \]
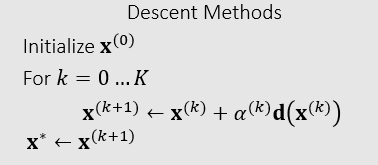
- 目的

- 算法流程
例子
- 梯度下降法
\[ \mathbf{d}(\mathbf{x})=-\nabla F(\mathbf{x}) \]
- 牛顿法
- 要求 Hessian 是正定的
- 正定矩阵的逆矩阵也是正定矩阵
\[ \mathbf{d}(\mathbf{x})=-\left(\dfrac{\partial^2F(\mathbf{x})}{\partial\mathbf{x}^2}\right)\nabla F(\mathbf{x}) \]
\[ -\nabla F(\mathbf{x})\mathbf{d}(\mathbf{x})=\nabla F(\mathbf{x})\left(\dfrac{\partial^2F(\mathbf{x})}{\partial\mathbf{x}^2}\right)\nabla F(\mathbf{x})>0 \]
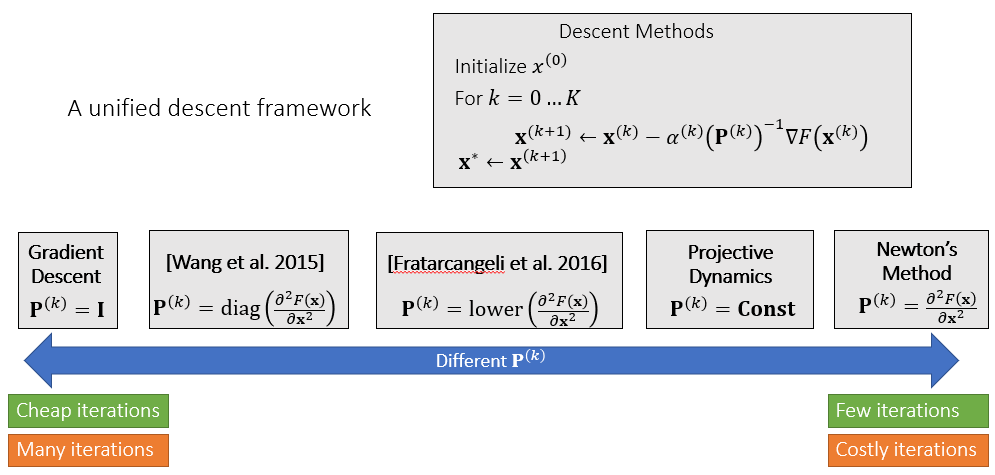
- 推广,只要 \(\mathbf{P}\)
是一个正定矩阵,如下方法都是一个下降方法
- 在 lab2 中的衣服模拟,我们使用一个很简单的对角矩阵(正定)也能够使得结果收敛
\[ \mathbf{d}(\mathbf{x})=-\mathbf{P}^{-1}\nabla F(\mathbf{x}) \]
通用框架
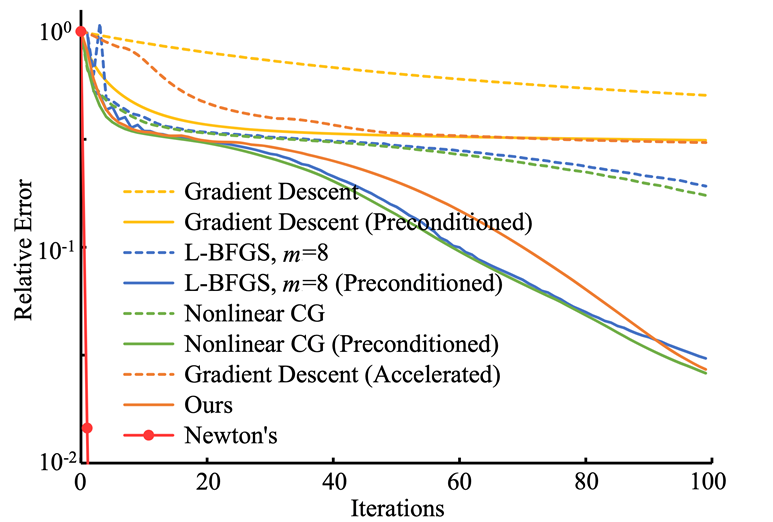
计算代价
- 总的计算代价 = 每次迭代的代价 \(\times\) 迭代次数
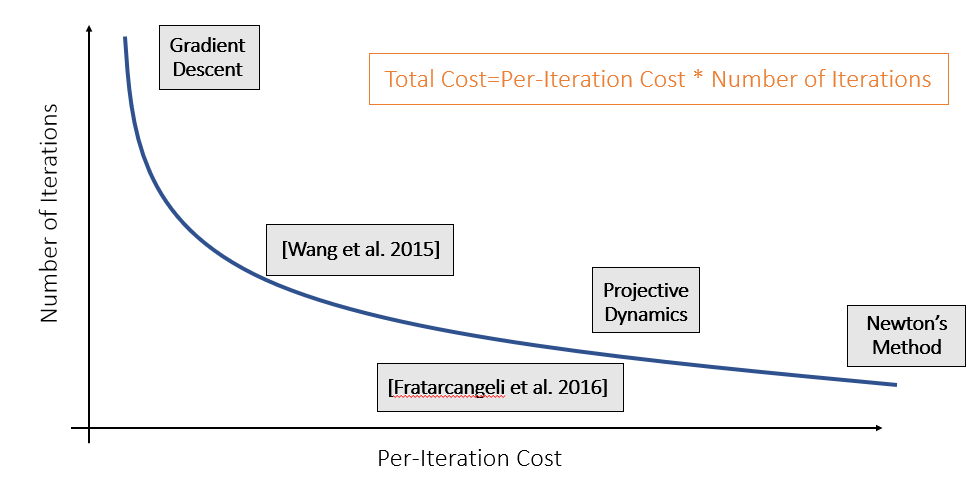
- 对比
- Wang. 2016. Descent Methods for Elastic Body Simulation on the GPU. TOG (SIGGRAPH Asia).
其他
- 真实感的模拟
- serious 的应用
- 模拟对真实感的要求很高
- 例如服装产业,期望和实际成衣在模特上效果一致
- 设计对比实验
- 真实的物理实验,参数化特征,量化误差
- 金属塑性形变一般使用**有限元模拟*