0%
约束方法
Projective Dynamics
- PBD 中使用投影函数直接改变顶点位置
- PD
利用投影函数计算出来的新位置定义一个二次能量函数(而不是直接修改顶点位置),利用构造出来的能量函数进行模拟
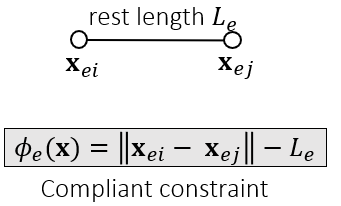
三角形
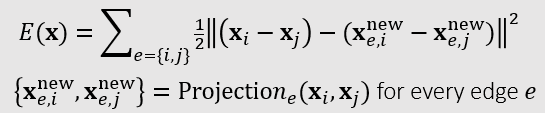
- 利用 PBD
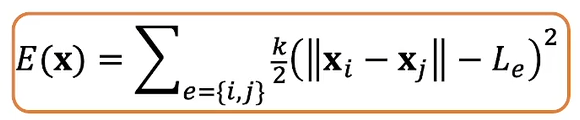
的投影函数,两个顶点之间的记录计算之后应该就是弹簧原长,进一步变形如下


- 能量对位置求负梯度得到力
- 假设 \(\mathbf{x}_{e,i}^{\textrm{new}}\) 和 \(\mathbf{x}_{e}\) 无关



- 力和弹簧的力也是一样的
- 因此这个模型和正常弹簧系统的模拟是一样的,只不过引入了两个中间变量
\(\mathbf{x}_{e,i}^{\textrm{new}},\mathbf{x}_{e,j}^{\textrm{new}}\)
- 为什么使用这个模型而不是原来的弹簧模型?
Hessian
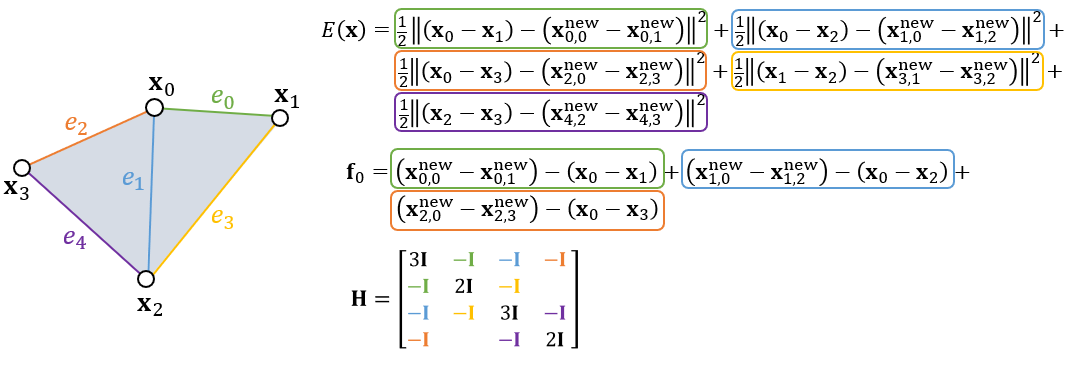
- Hessian 的可以利用拓扑结构得到(和计算一致)
- 对角线:从图上看相邻了几条边就是几
- 非对角线:存的是边,有就是 \(-\mathbf{I}\),否则为 \(\mathbf{0}\)
PD 的好处
- 利用上面的假设:假设 \(\mathbf{x}_{e,i}^{\textrm{new}}\) 和 \(\mathbf{x}_{e}\) 无关
- 能够将 Hessian 简化为一个常数矩阵
- Hessian 矩阵是常数之后能够带来大量的计算量上的减少
- LU 分解求解
\(Ax=b\)
- 在求解方程组的解的时候,需要进行分解操作(计算量很大)
- 如果是一个常数的话,对所有方程组求解的只需要分解一次
牛顿法
- 算法流程和隐式积分差不多,但是在方程组求解的部分简化了计算量
- 可以理解为就是在隐式积分的过程中,使用了一种方法对 Hessain
矩阵进行了近似
- PD 利用牛顿法求解如下
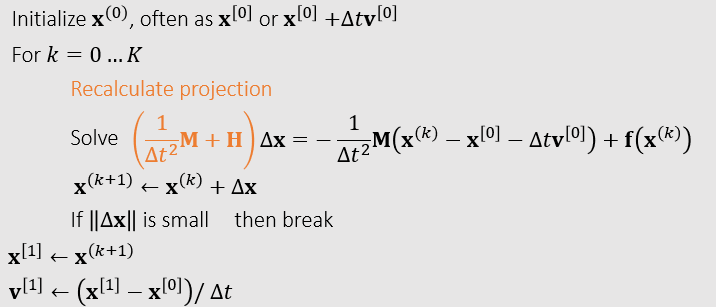
- 对于弹簧系统而言,力的计算和弹簧的力相同,Hessain又是常数,因此投影这一步完全可以省略
Shape Matching
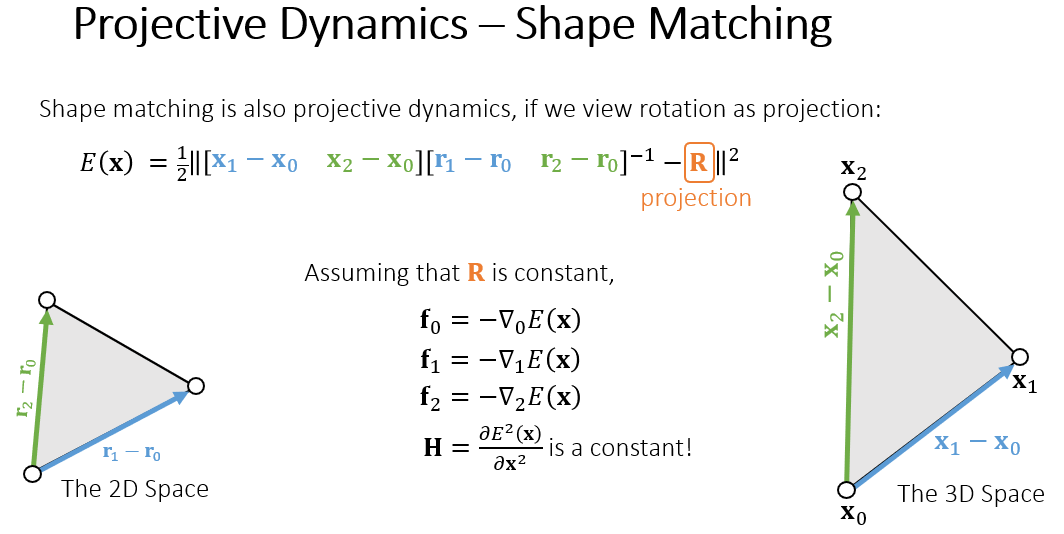
可行性分析
- 为什么这样对 Hessian 的计算也可以比较好的模拟?
- 本质上是对 Hessian 的一个合理近似
- 效率取决于对 Hessian 近似的好不好
其他
- 游戏中的布料模拟
- 例如衣服,更多的是利用人体骨骼驱动,在加上 PBD 的方法
- 在实际游戏模拟过程中,主要开销是在内存访问上,计算开销并不大
- PBD
对于内存的访问很少(只需要访问顶点位置),其他方法可能还有一些其他的物理变量需要访问
- 高性能的优化,内存访问是一个关键
评价
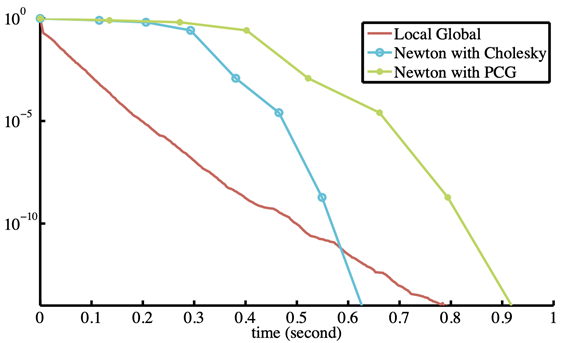
Pros
- 和 PBD 相比,是有物理含义的
- 在 CPU 上,作为直接法求解,效率很高(只需要分解一次)
- 在前几次迭代过程中收敛很快
Cons
- GPU 上比较慢
- LU 分解在 GPU 上不太合适
- 直接法在 GPU 上支持的都不太好
- 整体而言,收敛的比较慢(假设中没有考虑 projection 导致的
Hessian)
- 约束改变之后,修改起来比较麻烦(Hessain 矩阵需要修改)
论文
- Bouaziz et al. 2014. Projective Dynamics: Fusing Constraint
Projections for Fast Simulation. TOG (SIGGRAPH).
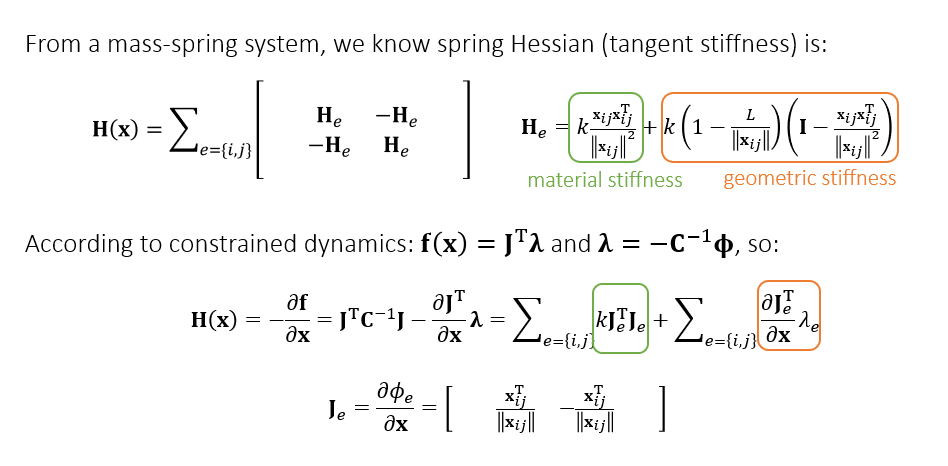
Constrained Dynamics
- 为了处理非常 stiff 的约束
- 更多的用在刚体模拟
- 例如人体的约束,大臂和小臂连接点的限制(这个约束很强,必须要满足,否则很诡异)
- 预先引入一个新的变量 \(\mathbf{\lambda}\),这样能够处理非常 stiff
的情况
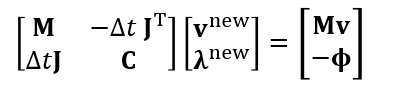
转换
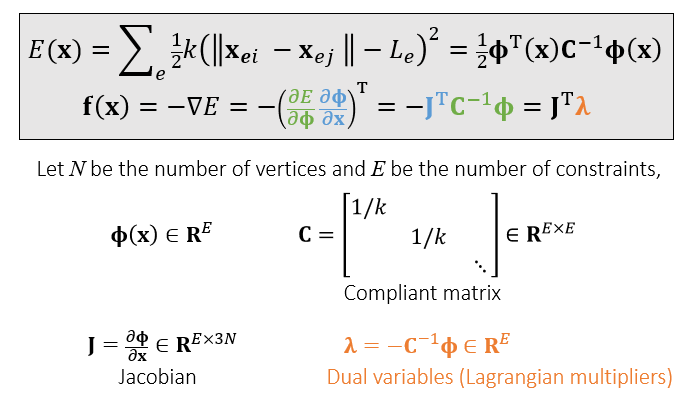
- 之前做隐式积分只有一个变量,现在有两个(\(\mathbf{x}/\mathbf{v},\mathbf{\lambda}\))
- 动量守恒:冲量 = 动量的变化量

- 近似
- 泰勒展开
- 位置变化量 = 速度 \(\times\)
时间

求解
Method 1
- primal dual method:两个变量一起求解
- 直接求解矩阵
Method 2
- 消元,先求解 \(\mathbf{\lambda}^{\textrm{new}}\)
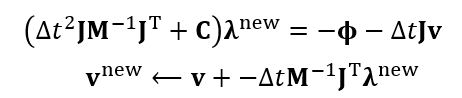
好处
- stiffness 很大的时候,\(k\to\infty\Longrightarrow\mathbf{C}\to\mathbf{0}\)
- 原来 \(k\to\infty\) 不好模拟,但是
\(\mathbf{C}\to\mathbf{0}\)
让模拟更简单了
应用
- Articulated Rigid Bodies (ragdoll animation)
- 假设人体是有很多刚体构成的,刚体和刚体之间有很多约束
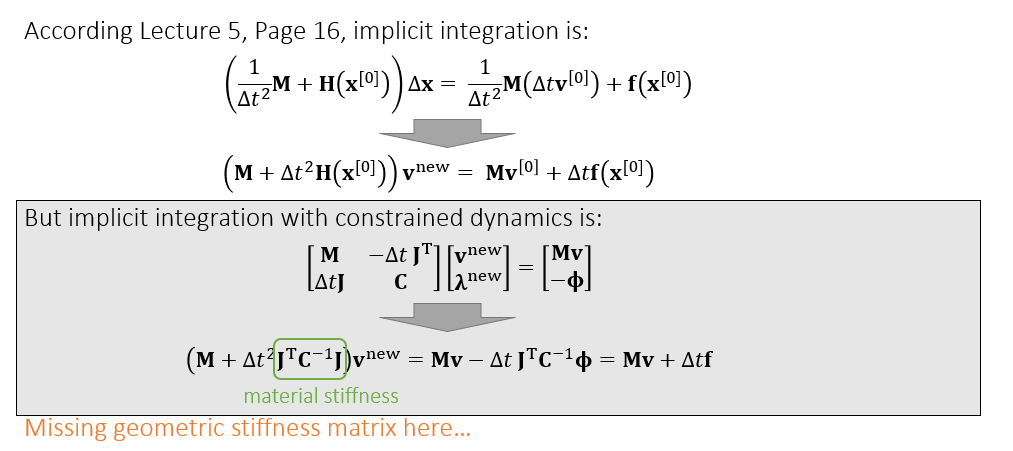
Stable Constrained Dynamics
- 上面矩阵求解如果把 \(mathbf{\lambda}\)
消去之后,则和隐式积分相同,但是 Hessian
有一部分消失了,如果把这部分加上去,模拟会更加稳定
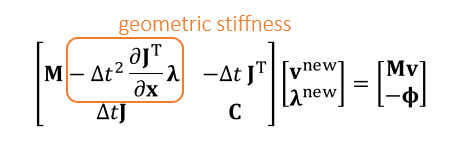
推导
论文
- Tournier et al. 2015. Stable Constrained Dynamics. TOG
(SIGGRAPH).
对比