GAMES103.王华民.05.Physics-Based Cloth Simulation
布料模拟
- 刚体的其他话题
- Articulation Body
- 关节体(人体骨骼动画)
- Articulation Body
- 方法:物理仿真模拟、基于约束的(PBD)、两者结合
主题
- 弹簧质点系统(Mass-Spring System)
- 隐式积分、显式积分
- 弯曲(bending)、弯曲带来的 locking 问题
- Co-Rotational Method
- 类似于 shape matching
弹簧质点系统
- Mass-Spring System
- 理想弹簧满足胡克定律
- Hooke's Law
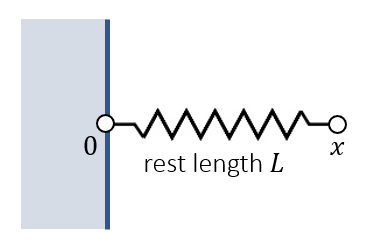
一维
- 弹簧原长(rest length)\(L\)
- 能量
\[ E(x)=\dfrac{1}{2}k(x-L)^2 \]
- 弹簧力:能量对位置的负导数
\[ f(x)=-\dfrac{\mathrm{d}E(x)}{x}=-k(x-L) \]
- \(k\):弹性系数(spring stiffness)
二维
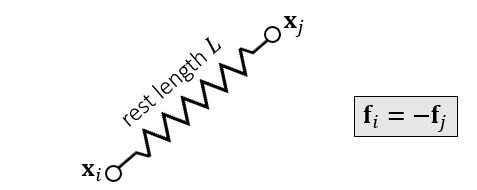
- 能量
\[ E(\mathbf{x})=\dfrac{1}{2}k(\Vert{\mathbf{x}_i-\mathbf{x}_j}\Vert-L)^2 \]
- 弹簧力:能量对位置的负梯度
- 分别对 \(\mathbf{x}_i,\mathbf{x}_j\) 求导
\[ f_i(\mathbf{x})=-\nabla_i E(\mathbf{x})=-k(\Vert{\mathbf{x}_i-\mathbf{x}_j}\Vert-L)\dfrac{\mathbf{x}_i-\mathbf{x}_j}{\Vert{\mathbf{x}_i-\mathbf{x}_j}\Vert} \]
\[ f_j(\mathbf{x})=-\nabla_j E(\mathbf{x})=-k(\Vert{\mathbf{x}_i-\mathbf{x}_j}\Vert-L)\dfrac{\mathbf{x}_j-\mathbf{x}_i}{\Vert{\mathbf{x}_i-\mathbf{x}_j}\Vert} \]
\[ f_j(\mathbf{x})=-f_i(\mathbf{x}) \]
多根弹簧
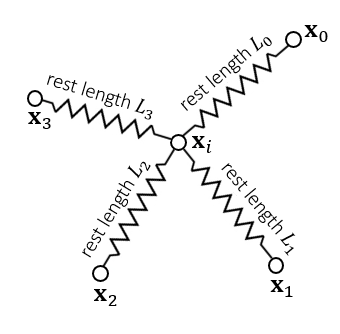
- 能量和力都是可以叠加的
- 能量:标量和
- 力:矢量和
\[ E=\sum_{e=0}^{3}\dfrac{1}{2}k(\Vert{\mathbf{x}_i-\mathbf{x}_e}\Vert-L_e)^2 \]
\[ \mathbf{f}_i=-\nabla_iE=\sum_{e=0}^{3}-k(\Vert{\mathbf{x}_i-\mathbf{x}_e}\Vert-L)\dfrac{\mathbf{x}_i-\mathbf{x}_e}{\Vert{\mathbf{x}_i-\mathbf{x}_e}\Vert} \]
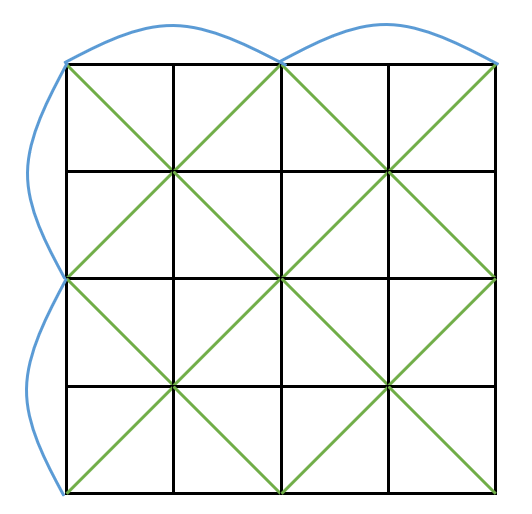
结构化的弹簧网络
- Structured Spring Networks
- 弹簧类型
- Horizontal(水平方向)
- Vertical(竖直方向)
- Diagonal(对角的)
- Bending(弯曲的)
- 防止面料任意的弯折
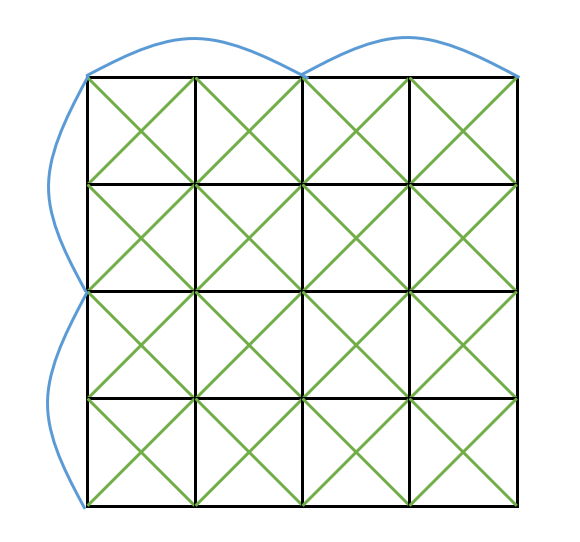
- 简化的弹簧网络
- 每一个小单元只保留 45 度或者 135 度的对角弹簧
- 不能都使用 45 度或者 135 度的,这样会让模拟有偏向性
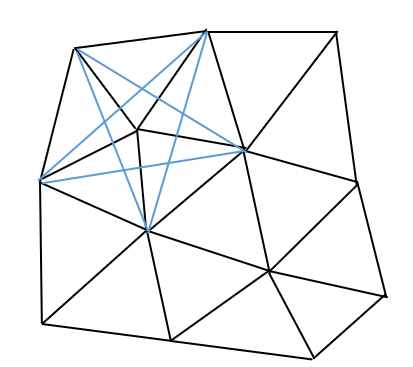
非结构化的弹簧网络
- Unstructured Spring Networks
- 面料不规则的版型
- 使用三角网格设计
- 弹簧
- Edges:每一条边都认为是一条弹簧
- Bending:相邻的两个三角形的相对的两个顶点加一根弹簧
- 用于抵抗弯曲
- 三角网格的表示
- 顶点列表 + 索引列表
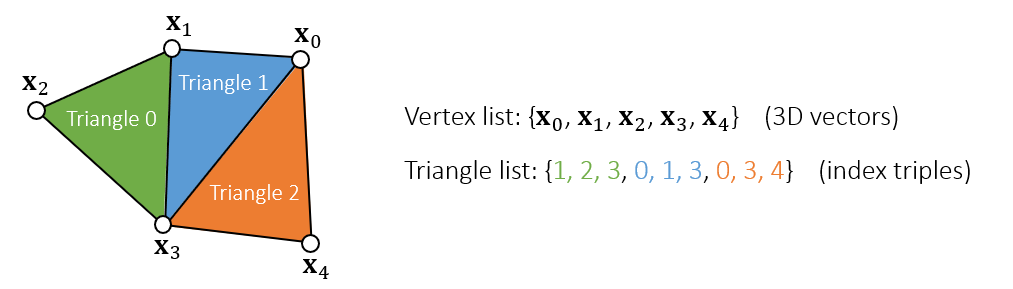
- 从上面的三角网格中获取到边的信息(表示边)
- 不能简单的直接把每个三角形的拿出来作为弹簧,因为存在重复边
- 内部边被两个三角形共享
- Topological Construction(拓扑结构)
- 几何处理
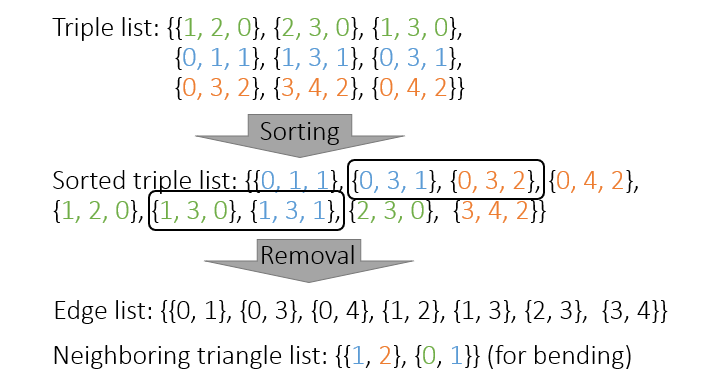
表示弹簧边
- 构造一个三元组列表(Triple list)
- (顶点1,顶点2,三角形序号)
- 顶点1 < 顶点2
- (顶点1,顶点2,三角形序号)
- 对这个三元组列表进行排序
- 排序规则:逐个比较三元组中的元素
- 排序之后重复的边位置会相邻
- 去除重复边,与此同时得到弯曲边
- 重复边:顶点1、2的索引都相同
- 弯曲边:重复边对应一条弯曲边
- 可以获取到相邻的两个三角形的信息
- 检查这两个三角形,获取到 Bending Edge
- 可以直接保存弯曲边,也可以保存相邻三角形对
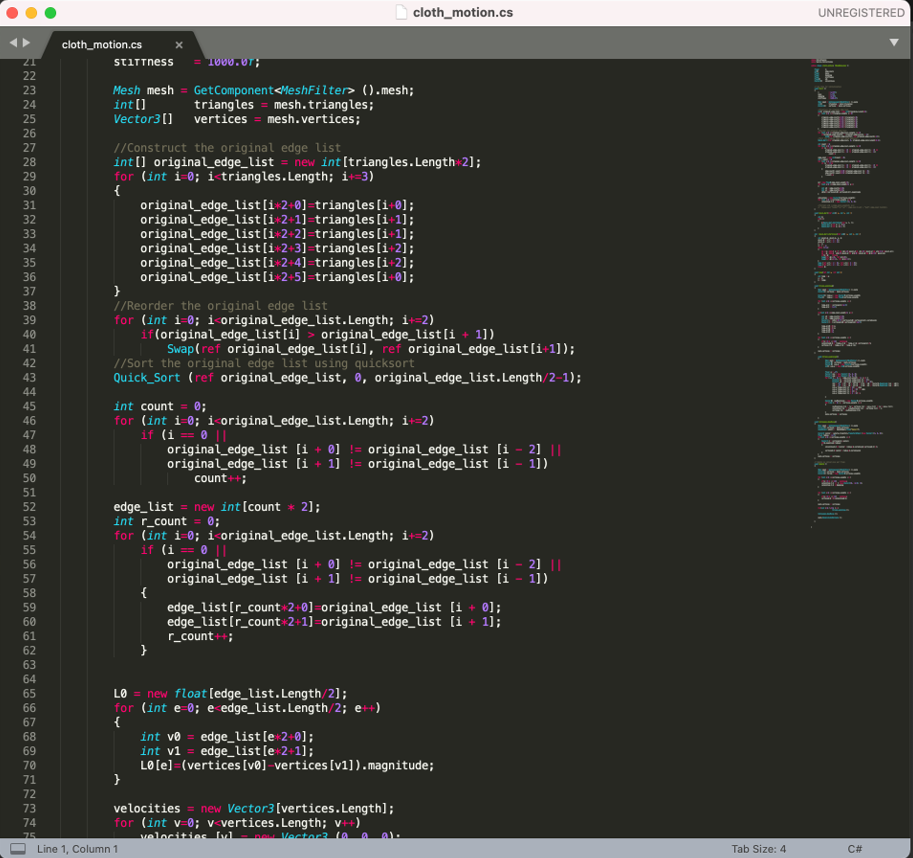
- 算法过程如下
- 参考代码
- lab2
模拟系统(显式积分)
- Explicit Integration
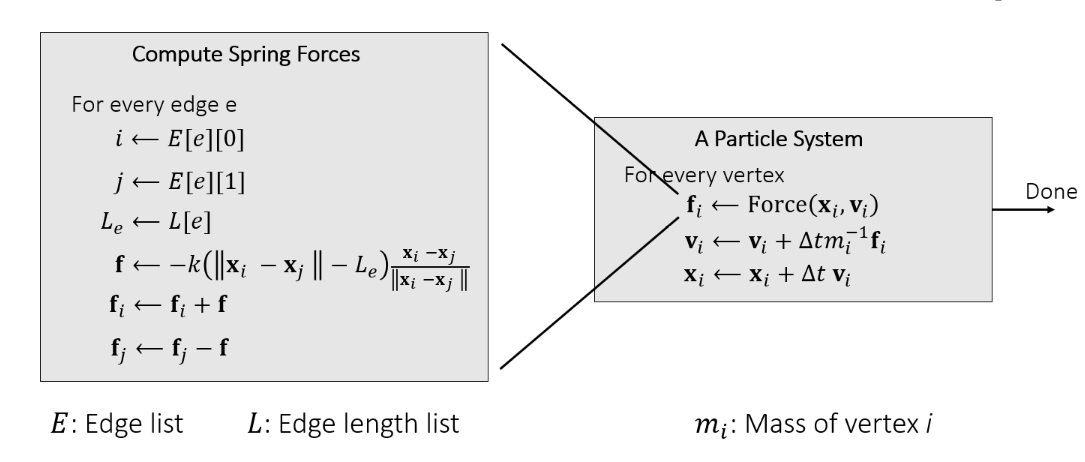
- 简单的粒子系统
- 对于每一个结点,计算他所受到的力
- 遍历每一根弹簧,把力叠加到结点上
- 通过力计算加速度
- 更新速度
- 更新位置
- 对于每一个结点,计算他所受到的力
- 算法如下
- 先算所有的力,再更新
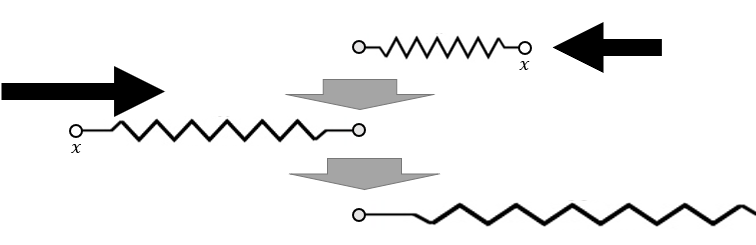
显式积分的问题
- numerical instability(数值上是不稳定的)
- overshooting 问题
- 弹簧的弹性系数 \(k\) 非常大 / 时间间隔 \(\Delta t\) 非常小 \(\to\) 力非常大
- 例子如下
- 状态1弹簧力非常大 \(\to\) 计算得到状态2
- 状态2弹簧力更大 \(\to\) 计算得到状态3
- 状态3弹簧力更大 \(\to\cdots\)
- 简单的解决方案:使用更小的时间间隔 \(\Delta t\)
- 让整个数值模拟过程变慢
- 其他解决方案:隐式积分
模拟系统(隐式积分)
- \(\mathbf{x}\) 表示所有顶点(\(\mathbb{R}^{3N}\)),\(\mathbf{M}\) 表示每个顶点的质量(对角矩阵)(\(\mathbb{R}^{3N\times3N}\))

- 左边
- 当前时刻是 \([1]\),我们不知道 \(\mathbf{f}^{[1]}\)
- 右边
- 消元 \(\mathbf{v}^{[1]}\),重写第二个式子
- 转化为如何求得 \(\mathbf{x}^{[1]}\)
- 我们做如下假设,\(\mathbf{f}^{[1]}\) 之和位置 \(\mathbf{x}^{[1]}\) 相关(不一定是线性的),此时转化为如下的方程
\[ \mathbf{x}^{[1]}=\mathbf{x}^{[0]}+\Delta t\mathbf{v}^{[0]}+\Delta t^2\mathbf{M}^{-1}\mathbf{f}(\mathbf{x}^{[1]}) \]
- 就是计算方法中学的隐式积分
- 等价于如下的优化问题,\(E(\mathbf{x})\) 是能量的表达式
- 保守力才能够表示为能量的形式,非保守力不能
- \(\Vert{\mathbf{x}}\Vert^2_{\mathbf{M}}=\mathbf{x}^{\mathbf{T}}\mathbf{M}\mathbf{x}\)
\[ F(\mathbf{x})=\dfrac{1}{2\Delta t^2}\Vert{\mathbf{x}-\mathbf{x}^{[0]}+\Delta t\mathbf{v}^{[0]}}\Vert^{2}_{\mathbf{M}}+E(\mathbf{x}) \]
\[ \mathbf{x}^{[1]}=\arg\max{F(\mathbf{x})} \]
- \(\nabla F(\mathbf{x})=0\)
就是上面的方程
- \(\mathbf{f}(\mathbf{x})=-\nabla E(\mathbf{x})\)
- 这个方法不仅仅能够使用在弹簧系统中,也适用于其他系统
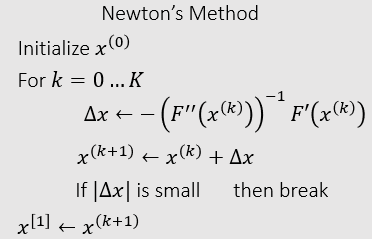
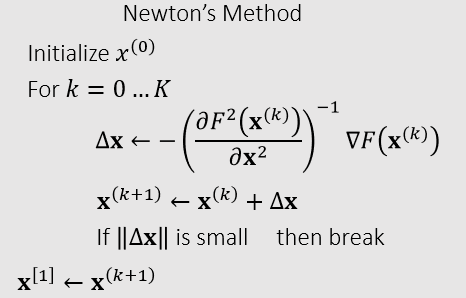
牛顿法
- Newton-Raphson Method
- 对于优化问题 \(\mathbf{x}^{[1]}=\arg\max{F(\mathbf{x})}\),要求 \(F(\mathbf{x})\) 是利普希茨连续的(Lipschitz continuous)
- 一阶泰勒展开
\[ \begin{aligned} 0=F'(x) &\approx F'(x^{(k)})+F''(x^{(k)})(x-x^{(k)})\\ &=F'(x^{(k)})+F''(x^{(k)})\Delta x\\ \end{aligned} \]
- 牛顿迭代法
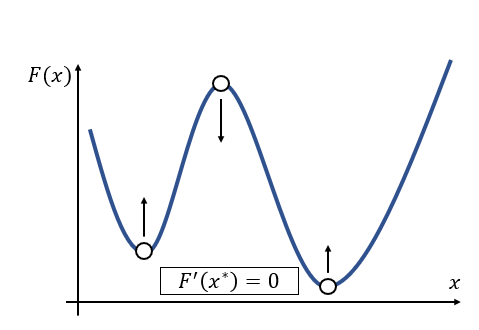
- 问题
- 可能会陷入局部最优
- 随机扰动
- 找到的可能是极大值或者极小值
- 如果二阶导恒大于等于 0,没有极大值,存在唯一的极小值
- 可能会陷入局部最优
高维牛顿法
\[ \begin{aligned} \mathbf{0}=\nabla F(\mathbf{x}) &\approx \nabla F(\mathbf{x}^{(k)})+\dfrac{\partial F^{2}(\mathbf{x}^{(k)})}{\partial \mathbf{x}^2}(\mathbf{x}-\mathbf{x}^{(k)})\\ &= \nabla F(\mathbf{x}^{(k)})+\dfrac{\partial F^{2}(\mathbf{x}^{(k)})}{\partial \mathbf{x}^2}\Delta\mathbf{x}\\ \end{aligned} \]
- 一阶导数是一个向量,二阶导数是一个矩阵
- 算法
牛顿法求解上述问题
\[ F(\mathbf{x})=\dfrac{1}{2\Delta t^2}\Vert{\mathbf{x}-\mathbf{x}^{[0]}+\Delta t\mathbf{v}^{[0]}}\Vert^{2}_{\mathbf{M}}+E(\mathbf{x}) \]
- 在方法中的参数如下
\[ \nabla F(\mathbf{x}^{(k)})=\dfrac{1}{\Delta t^2}\mathbf{M}\left({\mathbf{x}^{(k)}-\mathbf{x}^{[0]}+\Delta t\mathbf{v}^{[0]}}\right)-\mathbf{f}(\mathbf{x}^{(k)}) \]
\[ \dfrac{\partial F^{2}(\mathbf{x}^{(k)})}{\partial \mathbf{x}^2} =\dfrac{1}{\Delta t^2}\mathbf{M}+\mathbf{H}(\mathbf{x}^{(k)}) \]
- 算法如下
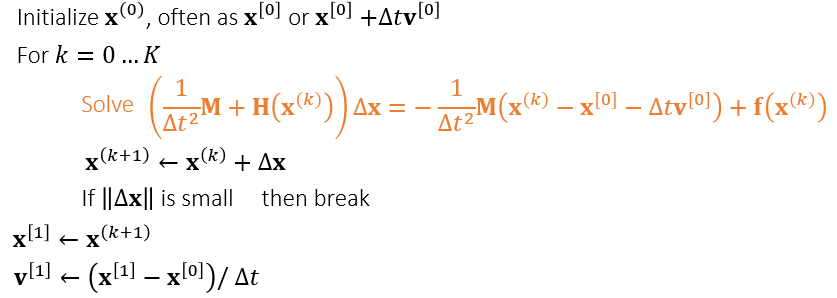
- 黄色部分:求解线性系统 \(\mathbf{A}\Delta\mathbf{x}=\mathbf{b}\)
- 之前比较老的方法就是求解一次线性方程组,得到近似结果
- 牛顿法是多次求解,直到满足容差
- 还有一个问题,如何求解上面的 Hessian 矩阵 \(\mathbf{H}(\mathbf{x}^{(k)})\) ?
Spring Hessian
- 一根弹簧的 Hessain 矩阵
- 两个顶点 \(i,j\)(每个顶点都是 3 维的)
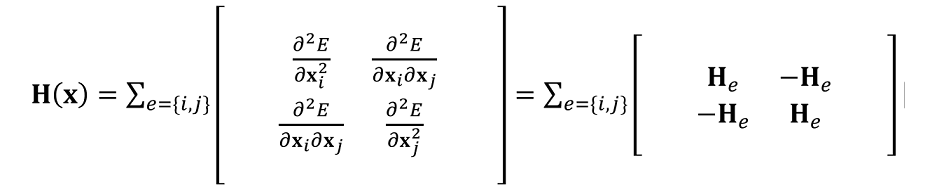
- \(\mathbf{x}_{ij}=\mathbf{x}_i-\mathbf{x}_j\)
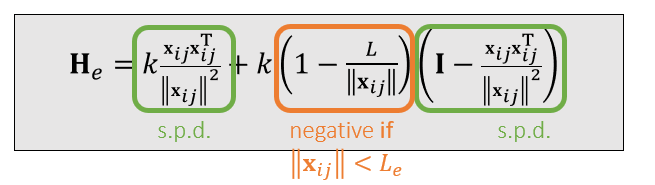
- 绿色是 s.p.d.(半正定的)
- \(\mathbf{x}^{\mathbf{T}}\mathbf{V}\mathbf{x}\ge0\)
- 右边:柯西不等式

- 如果黄色部分大于等于 0(弹簧被拉伸),则 \(\mathbf{H}_e\) 是半正定的,因此 \(\mathbf{H}(\mathbf{x})\) 也是半正定的
- 拉伸的时候,整个系统会更加稳定
- 黄色部分小于 0(弹簧被压缩),可能是不正定的
- 整个参数
\[ \dfrac{\partial F^{2}(\mathbf{x}^{(k)})}{\partial \mathbf{x}^2} =\dfrac{1}{\Delta t^2}\mathbf{M}+\mathbf{H}(\mathbf{x}^{(k)}) \]
- 如果 Spring Hessian 是半正定的,那么函数存在唯一解,是极小值
- \(\Delta t\) 越小,越正定
压缩弹簧多解的例子
- 弹簧受挤压,可能会有多种状态
- 2D:向上或者向下
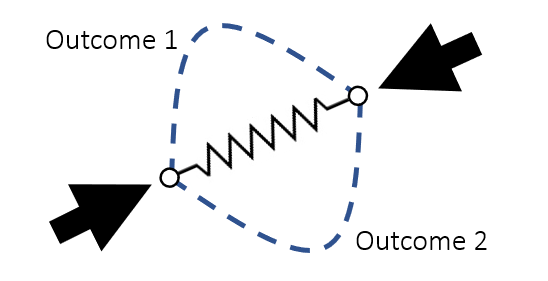
- 1D 没有这个问题,\(k>0\)
- 2D、3D 会有这个问题
正定性
- 正定与否可能会影响某些算法的稳定性
- 某些算法可能只适用于正定矩阵
- 保证正定:在检测到弹簧是压缩状态的时候,直接舍去后面一项
- 比较粗暴的方法(近似)
- 其他方法
- Choi and Ko. 2002. Stable But Responive Cloth. TOG (SIGGRAPH)
解线性方程组
- \(\mathbf{A}\Delta\mathbf{x}=\mathbf{b}\)
直接求解
- 方法
- LU 分解、LDLT 分解、Cholesky 分解
- 代价高,得到精确解
- 对矩阵 \(\mathbf{A}\) 限制少
- 适合 CPU 计算
迭代求解
- 如果需要得到精确解的话代价大,但是可以根据容差控制
- 要让方法收敛的话,对矩阵 \(\mathbf{A}\) 有比较严格的限制(例如正定)
- CPU、GPU 都行
- 实现比较容易
- 有很多加速算法
雅各比方法
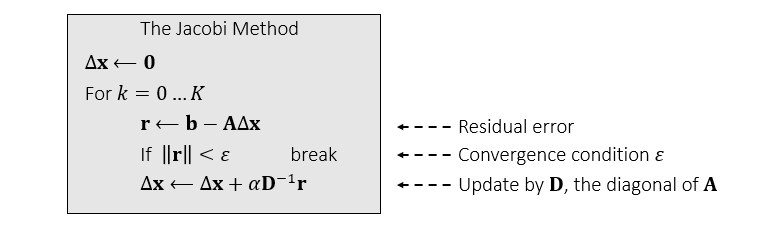
- 传统的雅各比方法:\(\alpha=1\)
- 如果矩阵式对角占优的(diagonal dominant),那么能够保证收敛到唯一解
- 控制 \(\alpha\) 的值,让更多情况下都尽可能收敛到解
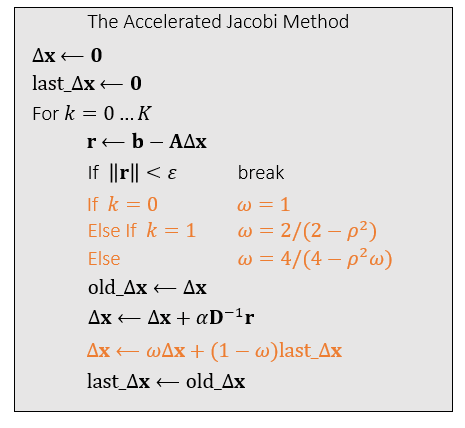
切比雪夫加速的雅各比方法
课后阅读
- Baraff and Witkin. 1998. Large Step in Cloth Simulation. SIGGRAPH.
- 最早使用隐式积分左布料模拟
- 将非线性方程线性化,等价于做了一次牛顿迭代