计算方法B.裴玉茹.09.常微分方程(5)
- PPT(常微分方程)
常微分方程
- 这里的局部截断误差都使用 PPT 的定义好了(需要除以步长 \(h\) )
1. 引子
神经 ODE
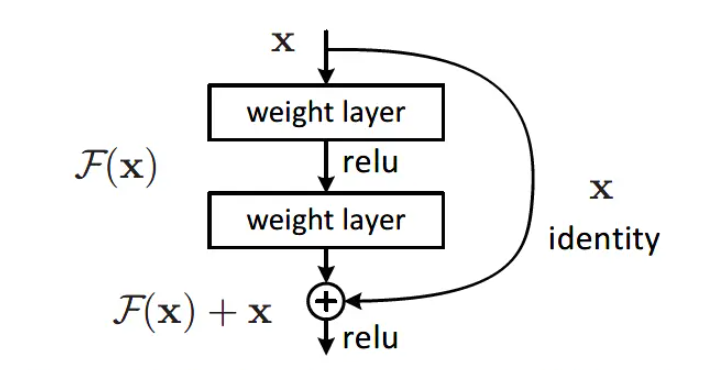
- 残差网络跳连
\[ h_{l+1}=h_{l}+\textrm{NNetwork}(h_l) \]
- ODE 前向欧拉方法
\[ h_{N}=h_{N-1}+\Delta tg((N-1)\Delta t,h_{N-1}) \]
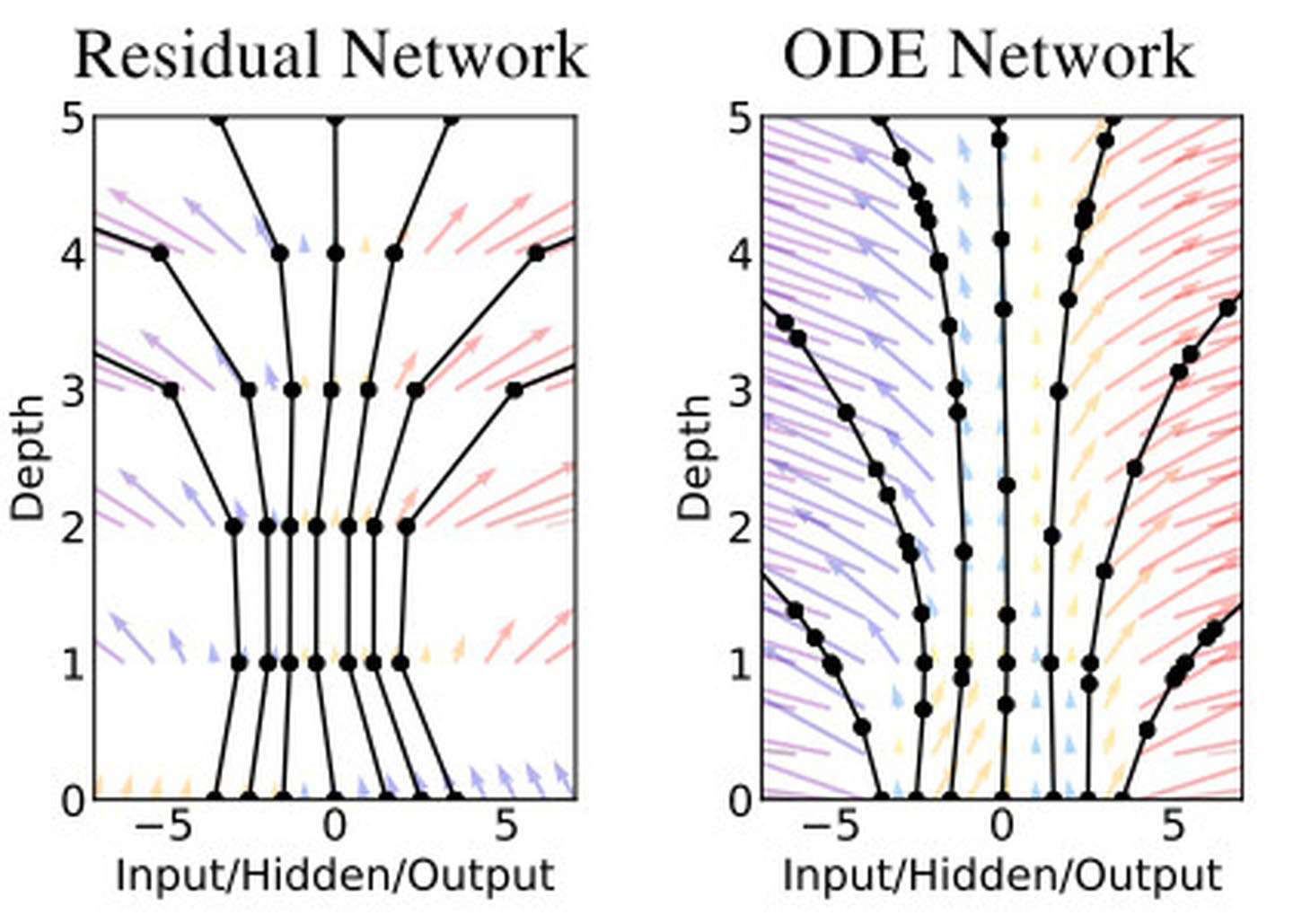
- 神经 ODE
- 把跳连使用 ODE 替换
\[ \begin{aligned} h_{t+1}&=h_{t}+f(h_t,\theta_t)\\ \dfrac{\mathrm{d}h(t)}{\mathrm{d}t}&=f(h(t),t,\theta) \end{aligned} \]
2. 常微分方程初值问题
- IVP:initial value problem
利普希茨条件
- Lipschitz 条件
- 凸集
- 初值问题的唯一解定理
- 利普希茨连续条件
恰定问题
well-posed
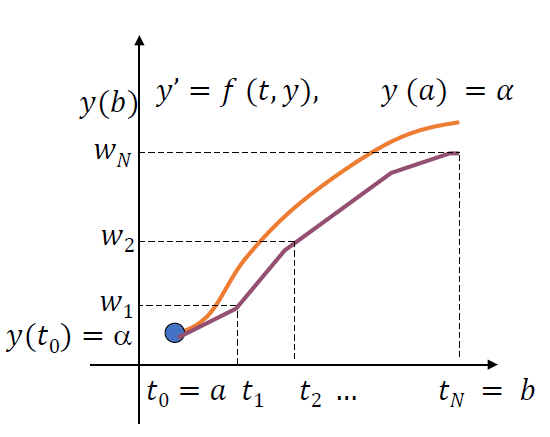
如果初值问题 \(\dfrac{\mathrm{d}y}{\mathrm{d}t}=f(t,y),t\in[a,b],y(a)=\alpha\) 满足如下两个条件,则是一个恰定问题
- 存在唯一解 \(y(t)\)
- 对于任意 \(\epsilon\),存在正常数 \(\vert\epsilon_0\vert<\epsilon\),满足 \(\delta(t)\le\epsilon\),在 \([a,b]\) 上连续,有如下问题的唯一解 \(z(t)\) \[ \dfrac{\mathrm{d}z}{\mathrm{d}t}=f(t,z)+\delta(t),t\in[a,b],z(a)=\alpha+\epsilon_0 \]
- 存在 \(k>0\),\(\vert{z(t)-y(t)}\vert<k\epsilon\),\(t\in[a,b]\)
条件 (2) 的含义就是,初始值有误差,计算有误差,结果的误差不至于太大(线性)
3. 欧拉方法
\[ \begin{aligned} w_0&=\alpha\\ w_{i+1}&=w_i+hf(t_i,w_i),\quad i\in\N\\ \end{aligned} \]
- 二阶
- 示例图
误差证明
- 教材上的证明是通过局部截断误差来得到全局截断误差
- PPT 上的方法如下
引理1
\[ \forall x\ge-1,\forall m>0\Longrightarrow0\le(1+x)^m\le e^{mx} \]
- 泰勒展开
\[ \begin{array}{c} e^{x}=1+x+\dfrac{1}{2}x^2e^{\xi}\ge1+x\ge0\\ (e^x)^{m}\ge(x+1)^{m}\ge0\\ \end{array} \]
引理2
- 正实数 \(s,t\),序列 \(\{a_i\}_{i=0}^{k}\) 满足 \(a_0\ge-\dfrac{t}{s}\),\(a_{i+1}\le (1+s)a_i+t\),则有
\[ a_{i+1}\le e^{(i+1)s}(a_0+\dfrac{t}{s})-\dfrac{t}{s} \]
- 一步步代入即可证明
\[ \begin{aligned} a_{i+1}&\le(1+s)a_i+t\\ &\le(1+s)^2a_{i-1}+t(1+(1+s))\\ &\cdots\\ &\le(1+s)^{i+1}a_0+t\dfrac{(1+s)^{i+1}-1}{s}\\ &=(1+s)^{i+1}\left(a_0+\dfrac{t}{s}\right)-\dfrac{t}{s}\\ &\le e^{(i+1)s}(a_0+\dfrac{t}{s})-\dfrac{t}{s} \end{aligned} \]
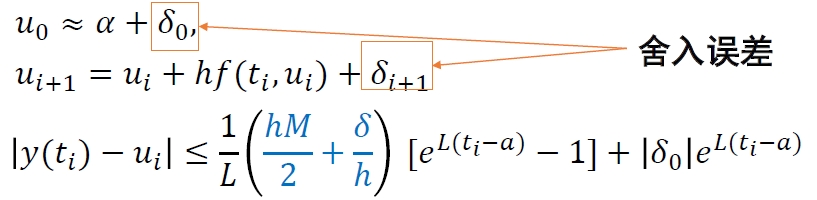
欧拉方法误差界
- 利普希茨常数 \(L\),\(\vert{y''}\vert\le M\)
\[ \vert{y(t_i)-w_i}\vert\le\dfrac{hM}{2L}(e^{(t_i-a)L}-1) \]
- 泰勒展开
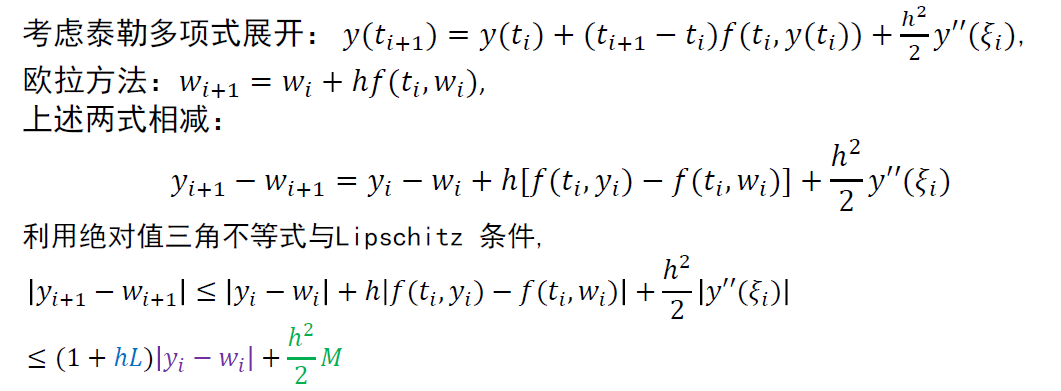
- 使用引理 2 即可
确定步长
- 综合考虑截断误差与舍入误差
- 认为 \(\delta_i<\delta\)
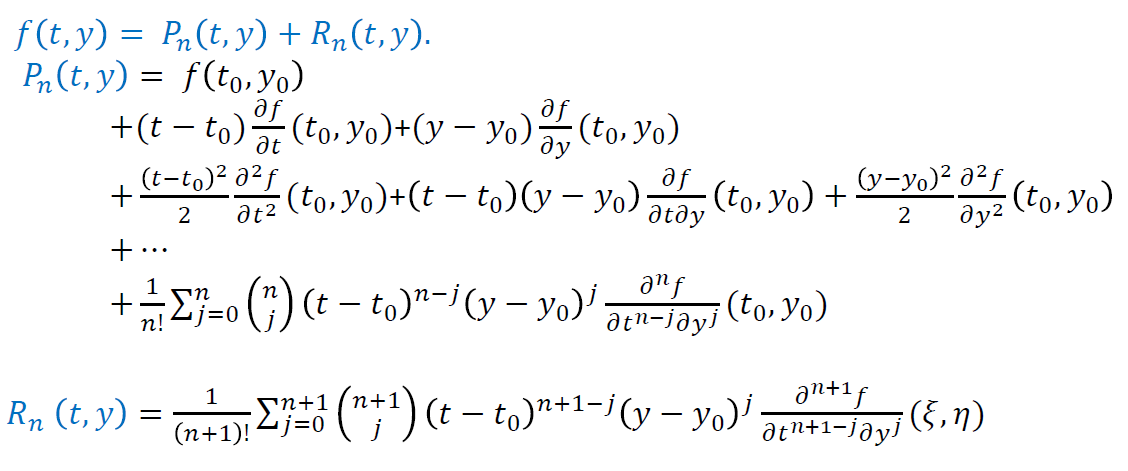
4. 高阶泰勒方法
- \(n\) 阶泰勒方法,把 \(y\) 展开到 \(n\) 阶,误差为 \(n+1\) 阶
- 即 \(f(t,y)\) 展开到 \(n-1\) 阶
- 定义如下
\[ \begin{aligned} w_0&\approx{\alpha}\\ w_{i+1}&=w_i+hT^{(n)}(t_i,w_i) \end{aligned} \]
- 其中 \(T^{(n)}(t,y)\) 定义如下
\[ T^{(n)}(t,y)=f(t,y)+\dfrac{h}{2}f'(t,y)+\dfrac{h^2}{6}f''(t,y)+\cdots+\dfrac{h^{n-1}}{n!}f^{n-1}(t,y) \]
- 带入上面的式子,可以发现其实就是把 \(y(t_{i+1})\) 在 \(t_i\) 处进行了 \(n\) 阶泰勒展开
局部截断误差(书本)
- 书上的定义
- \(n\) 阶泰勒公式
- \(n\) 阶 \(\Rightarrow\) \(n+1\) 阶局部截断误差 \(\Rightarrow\) \(n\) 阶全局误差
局部截断误差(PPT)
\[ \begin{aligned} w_0&\approx{\alpha}\\ w_{i+1}&=w_i+h\phi(t_i,w_i) \end{aligned} \]
- 按照 PPT 上的定义,局部截断误差定义如下
- 和书上相比除了一个 \(h\)
\[ \tau_{i+1}(h)=\dfrac{y_{i+1}-(y_i+h\phi(t_i,w_i))}{h}=\dfrac{y_{i+1}-y_i}{h}-\phi(t_i,w_i) \]
- 如此定义的话
- \(n\) 阶 \(\Rightarrow\) \(n\) 阶局部误差 \(\Rightarrow\) \(n\) 阶全局误差
5. 插值
- 除了等间距格点上的函数值,其它位置的函数值如何计算?
- 插值
- 线性插值、Hermit 插值
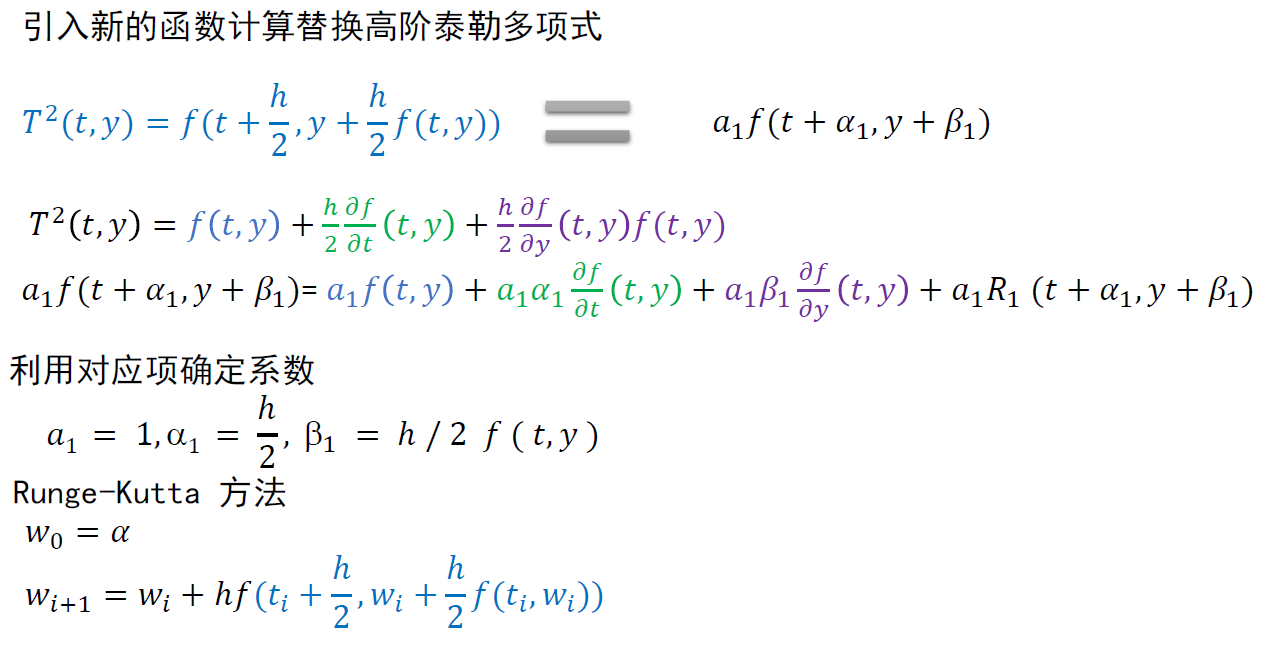
6. Runge-Kutta方法
- 具有高阶泰勒方法的局部截断误差
- 无需计算函数 \(f(t,y)\) 的导数
二维泰勒展开
RK2
- 如何构造 k 阶龙格库塔方法?
- 例如 RK2,局部截断误差 \(O(h^2)\)
- PPT 定义(除以 \(h\) 后)
- 但是外面会乘一个 \(h\),只需要将
\(f(t,y)\) 二阶展开
- 因为是对斜率进行估计
- 引入如下函数,使其与二阶泰勒公式 \(T^{2}(t,y)\) 一致
\[ a_1f(t+\alpha_1,y+\beta_1) \]
- 对应项系数相等
RK3
- \(T^{3}(t,y)\) 展开
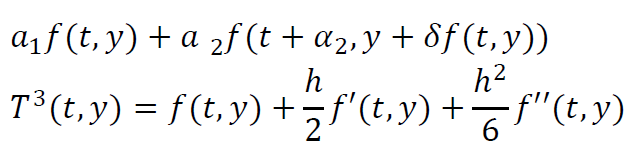
- 改进欧拉方法
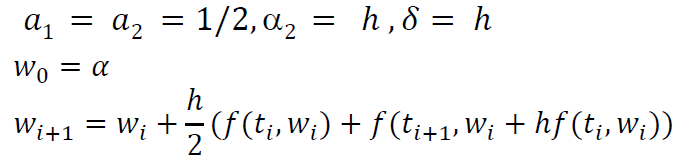
- Heun 方法

RK4
同伦与延拓方法
- 求解方程组的解转化为 ODE 的初值问题
龙格库塔方法

- 计算代价包含每步中函数值的计算
7. 可变步长方法
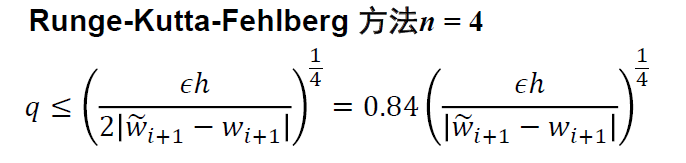
Runge-Kutta-Fehlberg 方法
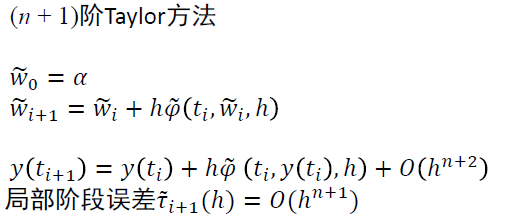
- 利用 \((n+1)\) 阶方法作为真值评估误差
- 记号
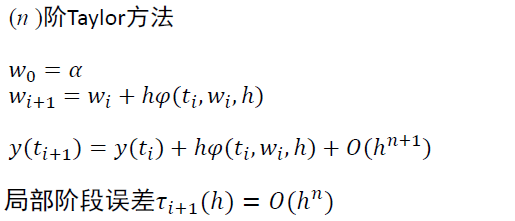
- 估计局部截断误差,认为 \(w_i=y(t_i)=\tilde{w}_i\)
\[ \tau_{i+1}(h)=\dfrac{y(t_{i+1})-y(t_{i})}{h}-\phi(t_i,y(t_i),h)=\dfrac{y(t_{i+1})-w_{i+1}}{h} \]
\[ \tilde{\tau}_{i+1}(h)=\dfrac{y(t_{i+1})-\tilde{w}_{i+1}}{h} \]
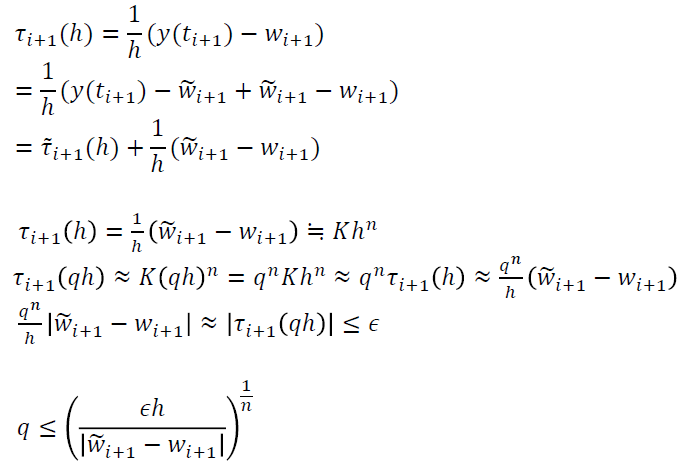
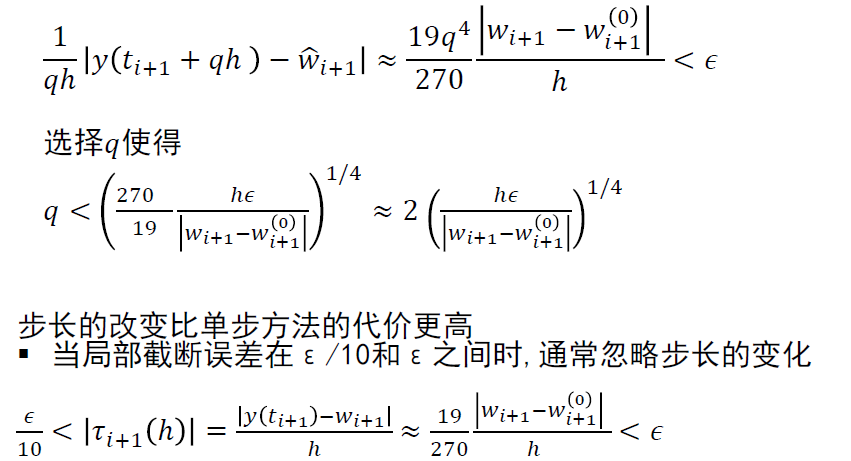
- 估计误差
- \(q\) 为步长修正系数(要求如何选择步长)
- 这里使用绝对误差 \(\epsilon\)
- 对比
- RK 4/5:共需要10(4+6)次函数值计算
- RKF 4/5:共需要 6 次函数值计算
- 修正步长
- \(q<1\):说明需要减小步长,之前的计算超出了要求的误差界
- 因此需要拒绝 \(h\),加大步长值重新计算
- \(q\ge1\):接受当前步的计算,为下一步设置合适的 \(h\)
- \(q<1\):说明需要减小步长,之前的计算超出了要求的误差界
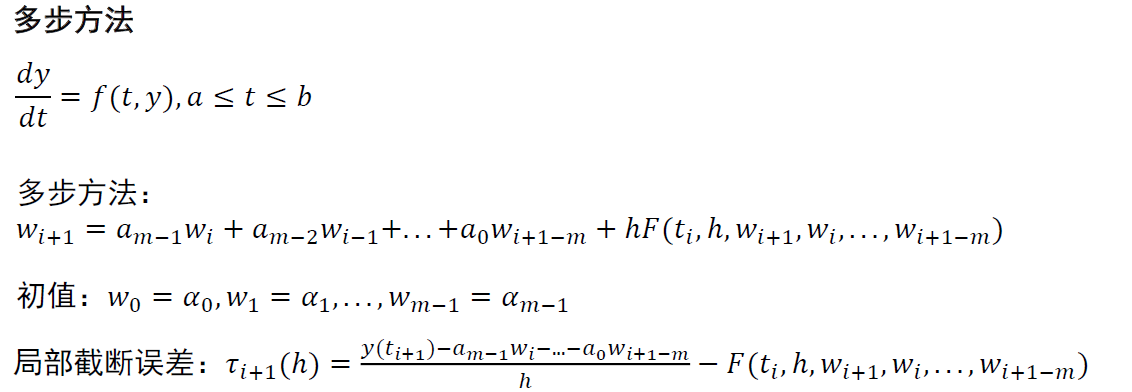
8. 多步方法
- 显式方法、隐式方法
- \(b_m{\buildrel\rm{?}\over=}0\)(PPT 定义和书上顺序反一下)
插值多项式近似
\[ y(t_{i+1})-y(t_i)=\int_{t_i}^{t_{i+1}}f(t,y)\;\mathrm{d}t\approx\int_{t_i}^{t_{i+1}}P(y)\;\mathrm{d}t \]
构造多步方法
Adams 方法
后向欧拉方法
- 隐式方法
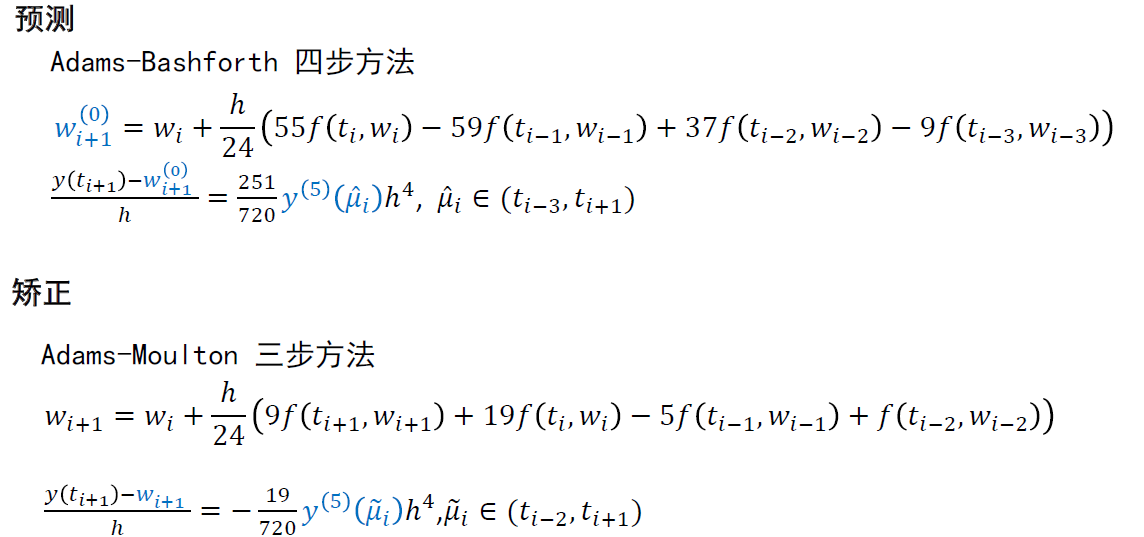
预测矫正方法
- 考虑四阶方法
- 利用四阶单步法计算起始值 \(w_0,w_1,w_2,w_3\)
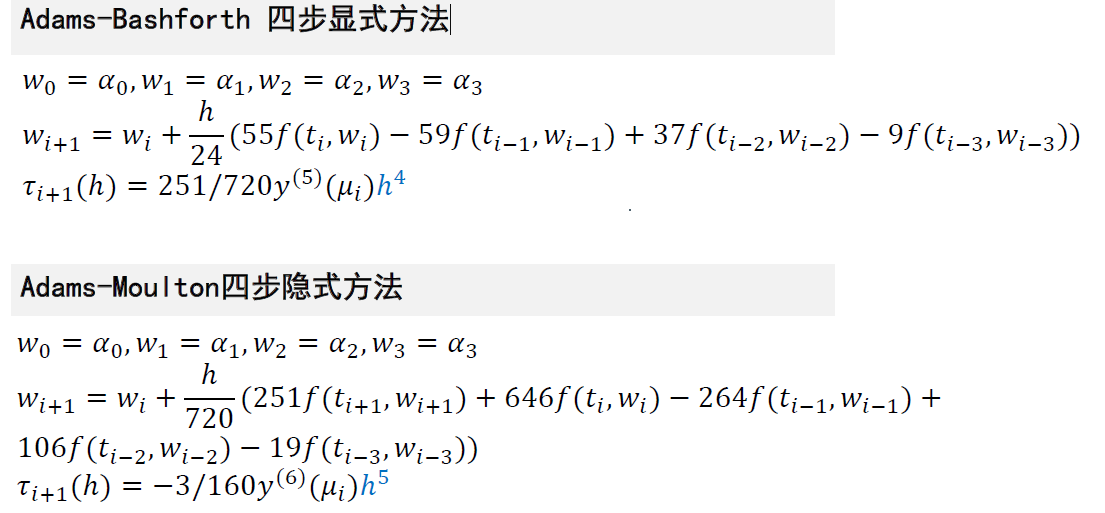
- 利用四步显式 Adams-Bashforth 方法计算 \(w_4\)
- 利用三步隐式 Adams-Moulton 方法进行矫正
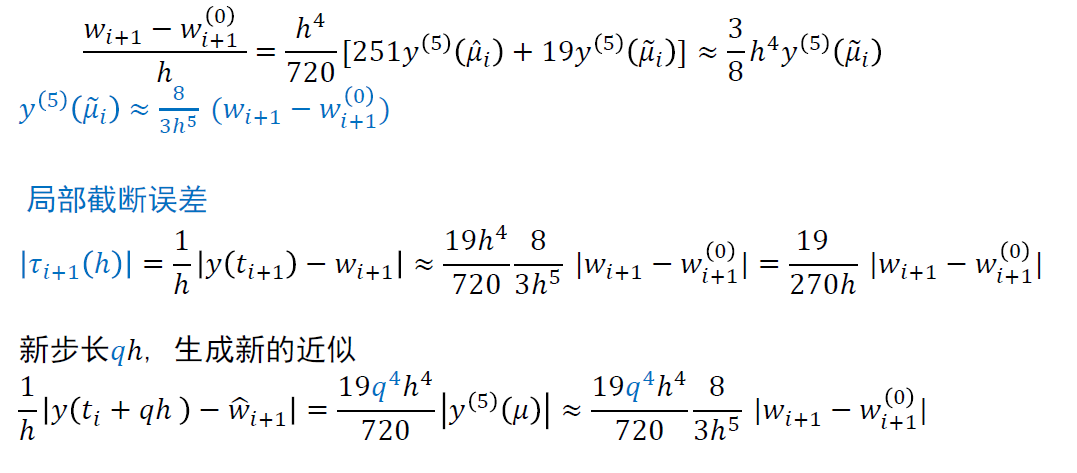
可变步长多步方法
- 预测、矫正、根据矫正的误差选择新的步长
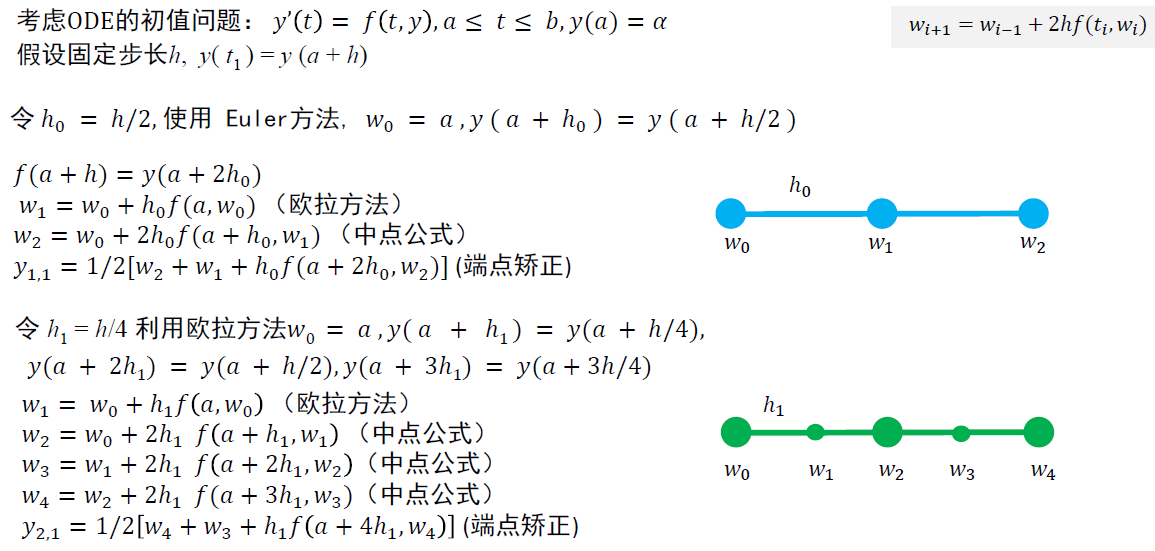
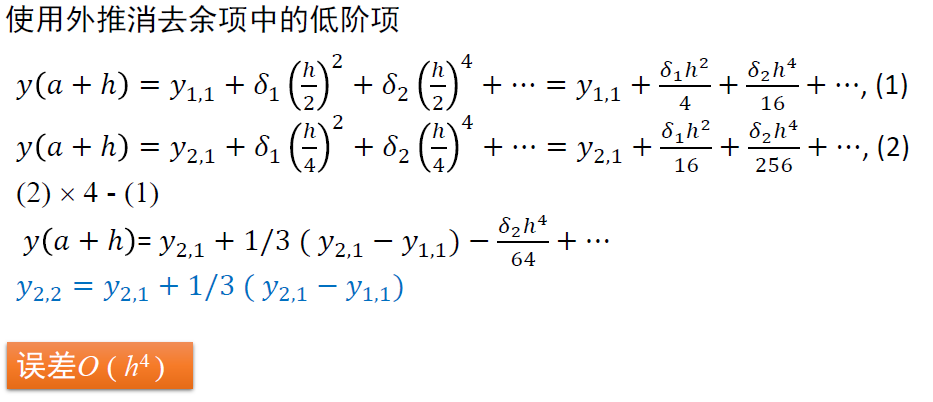
外推方法
- 外推方法引入更多函数计算改进近似精度
- 消去低阶项
- 例子如下
稳定性
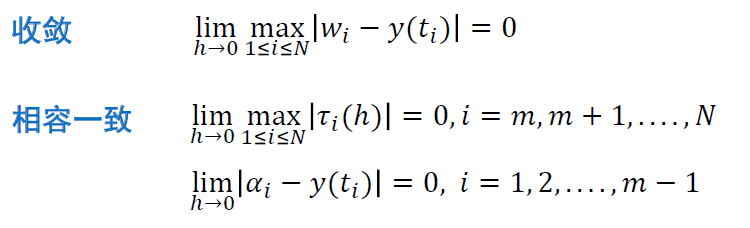
- 相容一致(consistent)
- 局部截断误差至少一阶
\[ \lim_{h\to0}\max_{1\le i\le N}\vert{\tau_i(h)}\vert=0 \]
- 收敛
\[ \lim_{h\to0}\max_{1\le i\le N}\vert{w_i-y(t_i)}\vert=0 \]
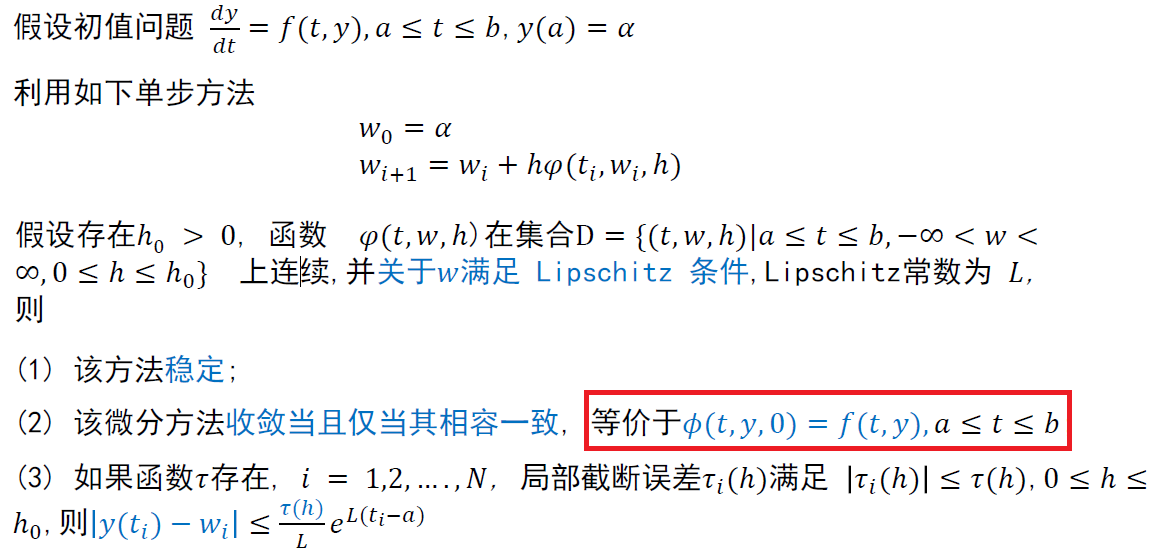
单步方法
- 相容一致只需要证明红框内部分即可
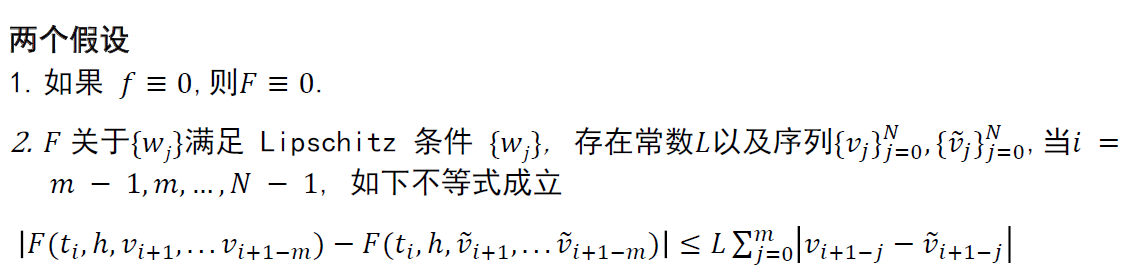
多步方法
- 在如下两个假设之下定义收敛、一致
- 多步方法特征多项式

- 根条件
- \(\lambda_i\le1\),所有绝对值为 1 的根都是单根
- 多步方法稳定当且仅当其满足根条件
- 如果方法与微分方程相容一致,则该方法稳定当且仅当其收敛
- 稳定性
- 强稳定(满足根条件,绝对值为 1 的根只有 1)
- 弱稳定(满足根条件,,绝对值为 1 的根不止一个)
- 不稳定(不满足根条件)