计算方法B.裴玉茹.09.常微分方程(2)
- 数值分析课本第 6 章(常微分方程) + PPT(常微分方程)
常微分方程
3. 常微分方程组
- 两个物理系统:钟摆、轨道力学
- 对于这两个系统的仿真促使了大量 ODE 求解器的开发
- 微分方程的阶:出现在方程中最高阶的导数
- 初值问题中,每一个变量都需要有他自己的初值
- 一个二元微分方程组的欧拉方法求解
- 确定两个变量的步长(可以都为 \(h\))
- 根据 \(w_{i,1},w_{i,2}\) 通过和之前一样的欧拉方法求解 \(w_{i+1,1},w_{i+1,2}\)
3.1 高阶方程
- 单个的高阶微分方程可以转化为一个方程组
- 原始高阶方程
\[ y^{(n)}=f(t,y,y',\cdots,y^{(n-1)}) \]
- 重新定义变量
\[ \begin{aligned} y_1&=y\\ y_2&=y'\\ &\cdots\\ y_n&=y^{(n-1)}\\ \end{aligned} \]
- 此时原始的常微分方程转化为 \(1\) 阶
\[ y^{(n)}=f(t,y_1,y_2,\cdots,y_n) \]
- 此时可以使用之前的方法求解
- 欧拉方法、显式梯形方法等
- 由于可以将高阶方程转化为一阶方程组,我们将仅仅关注一阶方程组
- 同时高阶方程组也可以相同的方式转化为一阶方程组
3.2 计算机仿真:钟摆

无衰减钟摆
- 无摩擦的运动方程
\[ mly''=F=-mg\sin{y} \]
- 化简得到
\[ y''=-\dfrac{g}{l}\sin{y} \]
- 初始条件:初始角度 \(y(0)\),初始角速度 \(y'(0)\)
- 转化为一阶方程组:\(y_1=y,y_2=y'\)
\[ \begin{aligned} y_1'&=y_2\\ y_2'&=-\dfrac{g}{l}\sin{y_1}\\ \end{aligned} \]
- 书中有 matlab 仿真的动画代码
- \(g=9.81\)
- 欧拉方法效果不佳,显式梯形方法就相对不错
衰减钟摆
\[ \begin{aligned} y_1'&=y_2\\ y_2'&=-\dfrac{g}{l}\sin{y_1}-dy_2\\ \end{aligned} \]
- 衰减系数 \(d>0\),最终稳定于 \(y_1=y_2=0\)
受力衰减钟摆
\[ \begin{aligned} y_1'&=y_2\\ y_2'&=-\dfrac{g}{l}\sin{y_1}-dy_2+A\sin{t}\\ \end{aligned} \]
- 当添加力后,大量的动态行为都变成可能
- 对于微分方程的二维自治系统(右边与 \(t\) 无关),Poincare-Bendixson
定理(来自微分方程理论)指出轨迹都将趋向于规律运动
- 钟摆最下位置的稳定平衡
- 像钟摆永远来回摆动的稳定周期循环
- \(d=1,A=10\)
- 附加的力使得系统非自治(可重写为三维的自治系统,但不是二维的自治系统),因而允许第三种类型的轨迹,即混乱轨迹
- \(d=1,A=15\)
双钟摆
- 双钟摆由两个简单钟摆组成,其中一个钟摆挂在另外一个钟摆上
- 如果 \(y_1\) 和 \(y_3\) 是两个钟摆相对于垂直方向的角度,微分方程系统如下
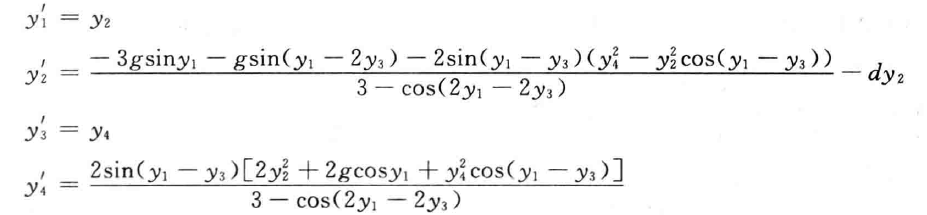
- \(l_1=l_2=1\)
- \(d\) 表示旋转轴的摩擦
- \(d=0\) 时,对于许多初始条件,双钟摆都表现为持续的非周期运动
3.3 计算机仿真:轨道力学
- 万有引力
\[ F=\dfrac{gm_1m_2}{r^2} \]
单体问题
- 在单体问题中,一个物体相对于另外一个物体的作用力被认为可忽略(一种简化)
- 小卫星绕着大行星转动的情况下,我们可以忽略卫星对于行星的力,因而行星可认为是固定的
模拟
- 大物体:\((0,0)\),小物体:\((x,y)\)
- 力的方向向量
\[ \left(-\dfrac{x}{\sqrt{x^2+y^2}},-\dfrac{y}{\sqrt{x^2+y^2}}\right) \]
- 得到二阶方程组如下
\[ \begin{aligned} m_1x''&=-\dfrac{x}{\sqrt{x^2+y^2}}\times\dfrac{gm_1m_2}{x^2+y^2}=-\dfrac{gm_1m_2x}{(x^2+y^2)^{3/2}}\\ m_1y''&=-\dfrac{y}{\sqrt{x^2+y^2}}\times\dfrac{gm_1m_2}{x^2+y^2}=-\dfrac{gm_1m_2y}{(x^2+y^2)^{3/2}}\\ \end{aligned} \]
- 转化为一阶方程组
\[ \begin{aligned} x'&=v_x\\ v_x'&=-\dfrac{gm_2x}{(x^2+y^2)^{3/2}}\\ y'&=v_y\\ v_y'&=-\dfrac{gm_2y}{(x^2+y^2)^{3/2}}\\ \end{aligned} \]
- 单体问题的解一定是圆锥曲线(椭圆、抛物线、双曲线)
- 单体问题是虚构的,由于它忽略了卫星对于(非常大的)的行星的力,包含后者得到的两个物体的运动被称为二体问题
三体问题
- 三个物体在重力的作用下交互运动,被称为三体问题
- 即使所有的运动都被局限在平面(受限三体问题),从本质上也可能难以预测长期的轨迹
- 非预测性来自于对初值条件的敏感依赖
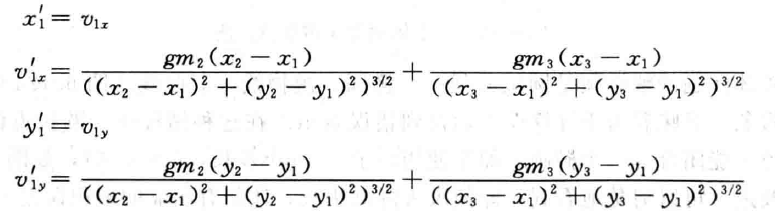
- 受限三体问题没一个物体都有 4 个方程
- 例如物体 1 的方程如下
4. 龙格-库塔方法和应用
- 龙格-库塔方法是一组 ODE 求解器,包含欧拉和梯形方法,以及更加复杂的高阶方法
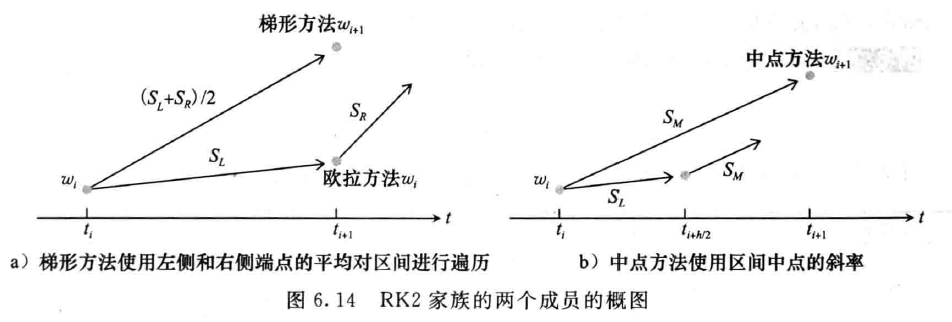
4.1 龙格-库塔家族
中点方法
\[ \begin{aligned} w_0&=y_0\\ w_{i+1}&=w_i+hf\left(t_i+\dfrac{h}{2},w_i+\dfrac{h}{2}f(t_i,w_i)\right) \end{aligned} \]
局部截断误差
- 泰勒展开
\[ y_{i+1} =y(t_i)+hf(t_i,y_i)+\dfrac{h^2}{2}\left(\dfrac{\partial{f}}{\partial{t}}(t_i,y_i)+\dfrac{\partial{f}}{\partial{y}}(t_i,y_i)f(t_i,y_i)\right)+\dfrac{h^3}{6}y'''(c) \]
- 中点方法,二维泰勒展开
\[ \begin{aligned} w_{i+1}&=w_i+hf\left(t_i+\dfrac{h}{2},y_i+\dfrac{h}{2}f(t_i,y_i)\right)\\ &=w_i+h\left(f(t_i,y_i)+\dfrac{h}{2}\dfrac{\partial{f}}{\partial{t}}(t_i,y_i)+\dfrac{h}{2}f(t_i,y_i)\dfrac{\partial{f}}{\partial{y}}(t_i,y_i)+O(h^2)\right)\\ \end{aligned} \]
- 对比,得到局部截断误差
\[ e_{i+1}=y_{i+1}-w_{i+1}=O(h^3) \]
- 中点方法是 \(2\) 阶方法
RK2
- 右侧的每个函数的求值被称为方法的阶段(stage)
- 梯形方法和中点方法都是二阶段的二阶龙格-库塔方法家族中的成员(RK2)
- RK2 的一般形式如下(\(\alpha\ne0\))
\[ w_{i+1}=w_i+h(1-\dfrac{1}{2\alpha})f(t_i,w_i)+h\dfrac{1}{2\alpha}f(t_i+\alpha h,w_i+\alpha hf(t_i,w_i)) \]
- 显式梯形方法:\(\alpha=1\)
- 中点方法:\(\alpha=\dfrac{1}{2}\)
局部截断误差
- 泰勒展开
\[ y_{i+1} =y(t_i)+hf(t_i,y_i)+\dfrac{h^2}{2}\left(\dfrac{\partial{f}}{\partial{t}}(t_i,y_i)+\dfrac{\partial{f}}{\partial{y}}(t_i,y_i)f(t_i,y_i)\right)+\dfrac{h^3}{6}y'''(c) \]
- 中点方法,二维泰勒展开
\[ \begin{aligned} w_{i+1}&=w_i+h(1-\dfrac{1}{2\alpha})f(t_i,w_i)+h\dfrac{1}{2\alpha}f(t_i+\alpha h,w_i+\alpha hf(t_i,w_i))\\ &=w_i+h\left(f(t_i,y_i)+\dfrac{1}{2\alpha}\left( \alpha h\dfrac{\partial{f}}{\partial{t}}(t_i,y_i)+\alpha hf(t_i,y_i)\dfrac{\partial{f}}{\partial{y}}(t_i,y_i)+O(h^2) \right)\right)\\ &=w_i+h\left(f(t_i,y_i)+\dfrac{h}{2}\left( \dfrac{\partial{f}}{\partial{t}}(t_i,y_i)+f(t_i,y_i)\dfrac{\partial{f}}{\partial{y}}(t_i,y_i) \right)\right)+O(h^3)\\ \end{aligned} \]
- 局部截断误差
\[ e_{i+1}=y_{i+1}-w_{i+1}=O(h^3) \]
RK4
- 一种常见的龙格-库塔方法
\[ \begin{aligned} w_{i+1}&=w_i+\dfrac{h}{6}(s_1+2s_2+2s_3+s_4)\\ s_1&=f(t_i,w_i)\\ s_2&=f(t_i+\dfrac{h}{2},w_i+\dfrac{h}{2}s_1)\\ s_3&=f(t_i+\dfrac{h}{2},w_i+\dfrac{h}{2}s_2)\\ s_4&=f(t_i+h,w_i+hs_3)\\ \end{aligned} \]
- 证明类似
- 泰勒展开,但是很复杂
- 方法是 4 阶的,所以局部截断误差是 5 阶的,展开得展开麻了
- 简单、容易编程实现
- 这是单步方法,仅需要一个初始条件
- 作为 4 阶方法,比欧拉方法或者梯形方法要精确得多
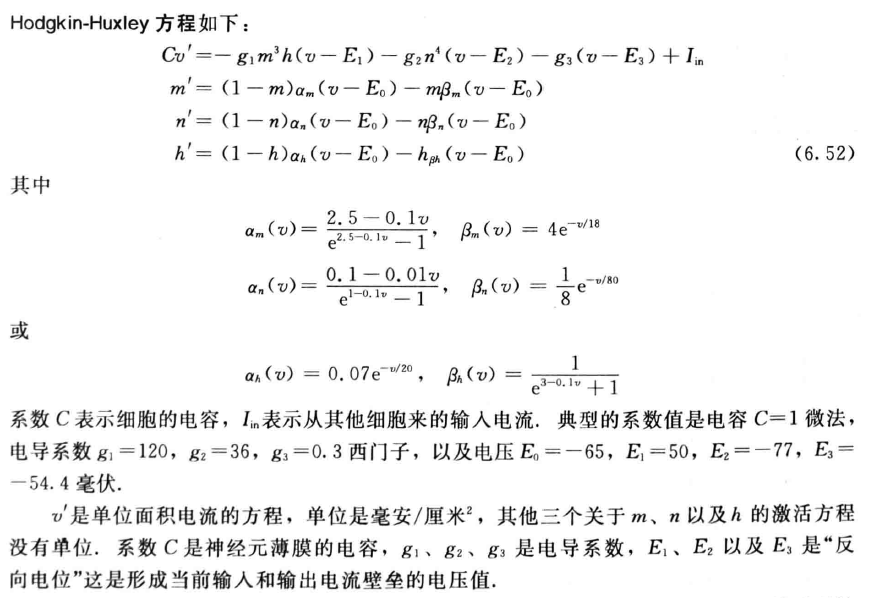
4.2 计算机仿真:Hodgkin-Huxley 神经元
4.3 计算机仿真:Lorenz 方程
- 气象学
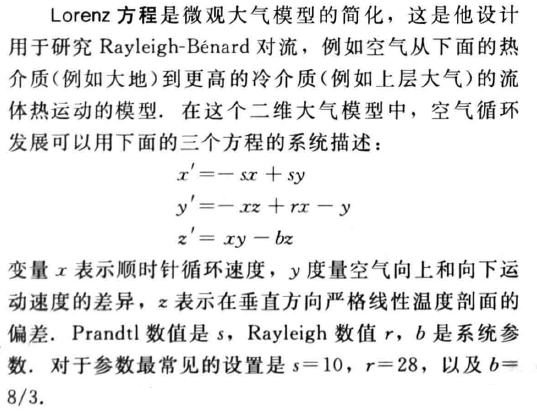
- 对于初值极度敏感:混沌现象