计算方法B.裴玉茹.09.常微分方程
- 数值分析课本第 6 章(常微分方程) + PPT(常微分方程)
常微分方程
- 微分方程是包含导数的方程
\[ y'(t)=f(t,y(t)) \]
1. 初值问题
1.0 logistic 方程
- 逻辑斯蒂方程(logistic)
\[ y'=cy(1-y) \]
- 常微分方程一般具有无穷多的解
- 通过定义初始条件,我们可以找出无穷多解中我们感兴趣的那个
- 一阶常微分方程的初值问题由两部分组成
- 方程
- 在指定区间 \([a,b]\) 上的初值条件
\[ \begin{array}{c} y'=f(t,y)\\ y(a)=y_a\\ t\in[a,b] \end{array} \]
- 自主的方程
- \(f(t,y)\) 与 \(t\) 无关
- 将微分方程当作斜率场(方向场)
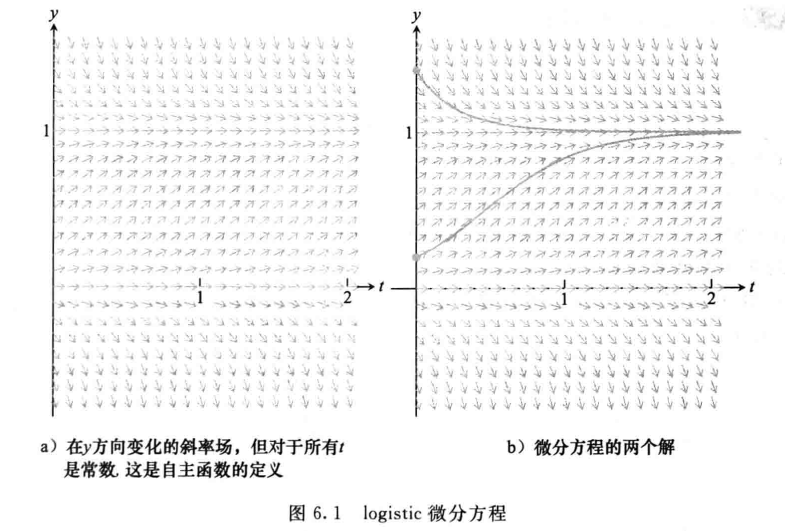
- 当 \(y_0\ne1\) 时,上述初值问题的解为
\[ y=1-\dfrac{1}{1+\dfrac{y_0}{1-y_0}e^{ct}} \]
- \(y_0=1\Longrightarrow y=1\)
1.1 欧拉方法
- 在一般的情况中,微分方程没有显式的解公式
几何求解方式
- 流程
- 画出斜率图
- 通过跟随箭头计算 “求解” 微分方程
- 有误差
- 如果正确的解斜率变化缓慢,则这样的解法是一个比较好的近似
- 这便是欧拉方法
欧拉方法
\[ \begin{aligned} w_0&=y_0\\ w_{i+1}&=w_i+hf(t_i,w_i) \end{aligned} \]
- 其中 \(h\) 表示步长
- 随着步长的减小,截断误差在变小
欧拉方法收敛性
\[ \begin{array}{c} y'=cy\\ y(0)=y_0\\ t\in[0,1] \end{array} \]
- 欧拉方法,对于固定的 \(t\in(0,1]\) 设步长 \(h\) 为 \(\dfrac{t}{n}\)
\[ w_n=(1+hc)^{n}y_0 \]
- \(n\to\infty\)
\[ \begin{aligned} \lim_{n\to\infty}w_n &=\lim_{n\to\infty}(1+\dfrac{tc}{n})^{n}y_0\\ &=\lim_{n'\to\infty}(1+\dfrac{1}{n'})^{ctn'}y_0\\ &=e^{ct}y_0 \end{aligned} \]
- 精确解可以通过分离变量求解,和上面相同
- \(n\to\infty\) 时,上述初值问题使用欧拉方法能够得到精确解
1.2 解的存在性、唯一性、连续性
利普希茨连续

- 利普希茨连续一定连续(定义可证),但是不一定可微
- 更一般的,条件中的矩形可以是凸集
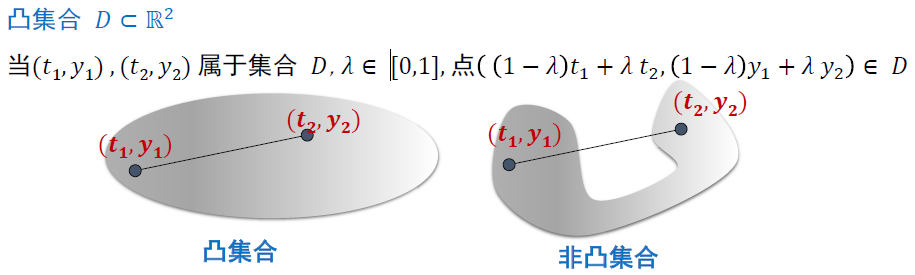
- 如果函数 \(f\) 对 \(y\) 连续可微,则利普希茨常数可以取在这个矩形(凸集)中如下式子的最大值
\[ \left\vert\dfrac{\partial{f}}{\partial{y}}(t,c)\right\vert \]
- 由均值定理保证
\[ \dfrac{f(t,y_1)-f(t,y_2)}{y_1-y_2}=\dfrac{\partial{f}}{\partial{y}}(t,c) \]
存在性和唯一性
- 利普希茨连续假设保证初值问题的解的存在性和唯一性
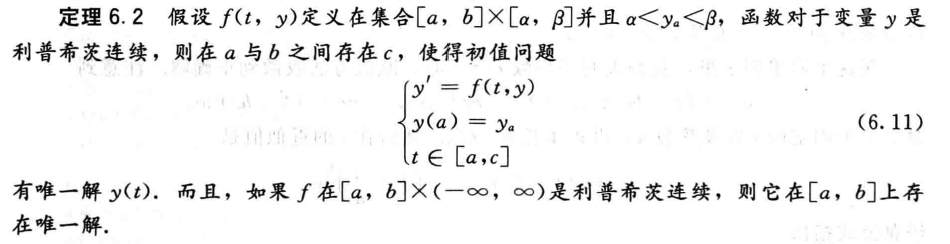
- 注意不能保证在整个区间上都是有解的
- 一个简单的原因是解可能超出了 \(y\)
的满足利普希茨常数有效的范围 \([\alpha,\beta]\)
- 在 \(y\) 方向上超出了凸集的范围
- 一个简单的原因是解可能超出了 \(y\)
的满足利普希茨常数有效的范围 \([\alpha,\beta]\)
- 定理证明
- G Birkhoff and G Rota [1989] Ordinary Differential Equations, 4th ed. John Wiley & Sons, New York.
误差放大
- 误差界
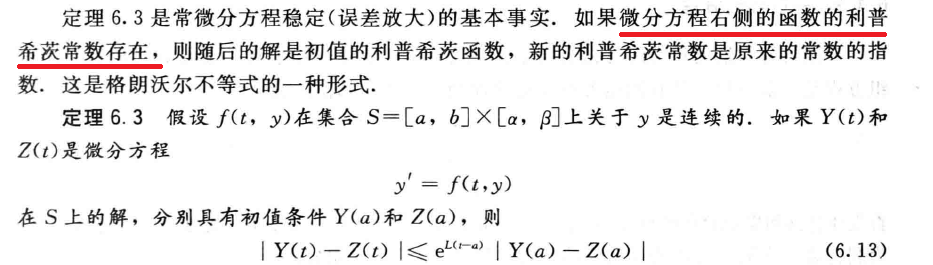
证明 (1)
- \(Y(a)=Z(a)\) 时,由唯一解定理,\(Y(t)=Z(t)\) 成立
证明 (2)
- \(Y(a)\ne Z(a)\) 时,此时不妨假设 \(Y(t)\ne Z(t),\forall t\in[a,b]\),否则在相等的点转化为上面的形式
- 令 \(u(t)=Y(t)-Z(t)\),此时 \(u(t)\) 恒正或者恒负,定理只使用绝对值,不妨假设 \(u(t)>0\)
- 利普希茨条件
\[ u'(t)=f(t,Y(t))-f(t,Z(t))\le L\vert{Y(t)-Z(t)}\vert=Lu(t) \]
- 于是
\[ (\ln{u})'=\dfrac{u'}{u}\le L \]
- 均值定理
\[ \dfrac{\ln{u(t)}-\ln{u(a)}}{t-a}=(\ln{u(\xi)})'\le L \]
- 转化即得
\[ u(t)\le u(a)e^{L(t-a)} \]
- 证毕
1.3 一阶线性方程
- 右侧是关于 \(y\) 的线性函数
- 考虑初值问题
\[ \begin{array}{c} y'=g(t)y+h(t)\\ y(a)=y_a\\ t\in[a,b] \end{array} \]
- 如果 \(g(t)\) 在区间 \([a,b]\)
上连续,则唯一解存在(都取最大值即可)
- 利普希茨常数
\[ L=\max_{[a,b]}g(t) \]
显式求解
要求积分因子 \(e^{-\int{g(t)\;\mathrm{d}t}}\) 能够显示表示 \[ \begin{aligned} (y'-g(t)y)e^{-\int{g(t)\;\mathrm{d}t}}&=h(t)e^{-\int{g(t)\;\mathrm{d}t}}\\ (ye^{-\int{g(t)\;\mathrm{d}t}})'&=h(t)e^{-\int{g(t)\;\mathrm{d}t}}\\ ye^{-\int{g(t)\;\mathrm{d}t}}&=\int{h(t)e^{-\int{g(t)\;\mathrm{d}t}}}\\ \end{aligned} \]
- 于是
\[ y=e^{\int{g(t)\;\mathrm{d}t}}\int{h(t)e^{-\int{g(t)\;\mathrm{d}t}}} \]
2. IVP 求解器的分析
- IVP(initial value problem):初值问题
2.1 局部与全局误差
- 初值问题
\[ \begin{array}{c} y'=f(t,y)\\ y(a)=y_a\\ t\in[a,b] \end{array} \]
- 一步求解器(如欧拉方法)
- 单步初值问题
\[ \begin{array}{c} y'=f(t,y)\\ y(t_i)=w_i\\ t\in[t_i,t_{i+1}] \end{array} \]
- 使用 \(z\) 表示单步初值问题的精确解
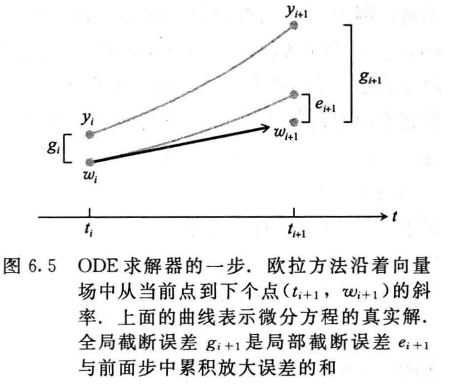
- 全局截断误差:\(g_i=\vert{w_i-y_i}\vert\)
- 累计误差
- 局部截断误差:\(e_i=\vert{w_i-z(t_i)}\vert\)
- 单步误差
- 注意:全局截断误差不是简单的局部截断误差求和
欧拉方法的局部截断误差
- \(t_{i+1}=t_i+h\)
- 泰勒展开
\[ \begin{aligned} y(t_i+h)&=y(t_i)+hy'(t_i)+\dfrac{h^2}{2}y''(c)\\ &=w_i+hf(t_i,w_i)+\dfrac{h^2}{2}y''(c)\\ \end{aligned} \]
- 欧拉方法
\[ w_{i+1}=w_i+hf(t_i,w_i) \]
- 局部截断误差
\[ e_{i+1}=\dfrac{h^2}{2}\vert{y''(c)}\vert \]
- 假设 \(y''\) 在区间 \([a,b]\) 的上界为 \(M\),于是欧拉方法的局部截断误差的上界如下
\[ e_i\le\dfrac{Mh^2}{2} \]
全局截断误差
- 假设步长不变,都为 \(h\)
- 初始条件,\(y(a)=y_a\)
- 初始全局截断误差:\(g_0=0\)
- 第一步
- 没有之前的累计误差
\[ g_1=e_1=\vert{w_1-y_1}\vert \]
- 第二步
- 需要考虑累计误差
- 第二部分的误差由上面的定理给出
\[ \begin{aligned} g_2&=\vert{w_2-y_2}\vert=\vert{w_2-z(t_2)+z(t_2)-y_2}\vert\\ &\le\vert{w_2-z(t_2)}\vert+\vert{z(t_2)-y_2}\vert\\ &=e_2+e^{Lh}g_1\\ &=e_2+e^{Lh}e_1\\ \end{aligned} \]
- 第 \(i\) 步
\[ \begin{aligned} g_i&\le e_i+e^{Lh}g_{i-1}\\ &\le\cdots\\ &\le e_i+e^{Lh}e_{i-1}+e^{2Lh}e_{i-2}+\cdots+e^{(i-1)Lh}e_1 \end{aligned} \]
- 于是我们得到了一个全局截断误差的上界估计
- 一般的我们如果假设 \(e_i\le Ch^{k+1}\),于是全局截断误差如下
\[ \begin{aligned} g_i&\le\dfrac{Ch^{k+1}(e^{iLh}-1)}{e^{Lh}-1}\\ &\le\dfrac{Ch^{k+1}(e^{iLh}-1)}{Lh}\\ &=\dfrac{Ch^{k}(e^{iLh}-1)}{L}\\ \end{aligned} \]
- 例如,欧拉方法的全局截断误差
- \(C=\dfrac{M}{2},k=1\)
\[ g_i\le\dfrac{Ch^{k}(e^{iLh}-1)}{L}=\dfrac{Mh(e^{iLh}-1)}{2L} \]
定理描述

- 如果当 \(h\to0\) 的时候,\(g_i\to0\),则称上述求解器为 \(k\) 阶方法
欧拉方法的收敛性

- 欧拉方法是 1 阶方法
- 欧拉方法构造简单,但是阶数低,近似程度不够
- 优化:提高阶数
2.2 显式梯形方法
\[ \begin{aligned} w_0&=y_0\\ w_{i+1}&=w_i+h\dfrac{f(t_i,w_i)+f(t_i+h,w_i+hf(t_i,w_i))}{2} \end{aligned} \]
- 直观上讲
- 欧拉方法离散步的斜率从区间 \([t_i,t_{i+1}]\) 的左端点
- 显式梯形方法离散步的斜率是区间 \([t_i.t_{i+1}]\) 的左右端点均值
- 显式方法:右端点的属性可以通过现有的值计算
- 梯形方法:如果 \(f(t,y)\) 和 \(y\) 无关,那么便是梯形公式
- 也被称为
- 改进的欧拉方法
- Heun 方法
局部截断误差
- 对微分方程 \(y'=f(t,y)\) 两边对 \(t\) 求偏导
\[ \begin{aligned} y''(t) &=\dfrac{\partial{f}}{\partial{t}}(t,y)+\dfrac{\partial{f}}{\partial{y}}(t,y)y'(t)\\ &=\dfrac{\partial{f}}{\partial{t}}(t,y)+\dfrac{\partial{f}}{\partial{y}}(t,y)f(t,y)\\ \end{aligned} \]
- 泰勒展开
\[ \begin{aligned} y_{i+1} &=y(t_i+h)\\ &=y(t_i)+hy'(t_i)+\dfrac{h^2}{2}y''(t_i)+\dfrac{h^3}{6}y''(c)\\ &=y(t_i)+hy'(t_i)+\dfrac{h^2}{2}\left(\dfrac{\partial{f}}{\partial{t}}(t_i,y_i)+\dfrac{\partial{f}}{\partial{y}}(t_i,y_i)f(t_i,y_i)\right)+\dfrac{h^3}{6}y'''(c)\\ \end{aligned} \]
- 显式梯形方法(二维泰勒展开)
\[ \begin{aligned} &f(t_i+h,y_i+hf(t_i,y_i))\\ =&f(t_i,y_i)+h\dfrac{\partial{f}}{\partial{t}}(t_i,y_i)+hf(t_i,y_i)\dfrac{\partial{f}}{\partial{y}}(t_i,y_i)+O(h^2)\\ \end{aligned} \]
- 于是改写
\[ \begin{aligned} w_{i+1} &=y_i+h\dfrac{f(t_i,y_i)+f(t_i+h,y_i+hf(t_i,y_i))}{2}\\ &=y_i+hf(t_i,y_i)+\dfrac{h^2}{2}\left(\dfrac{\partial{f}}{\partial{t}}(t_i,y_i)+f(t_i,y_i)\dfrac{\partial{f}}{\partial{y}}(t_i,y_i)\right)+O(h^3)\\ \end{aligned} \]
- 于是得到局部截断误差
\[ e_{i+1}=y_{i+1}-w_{i+1}=O(h^3) \]
- 显式梯形方法是 \(2\) 阶方法
- 复杂度讨论
- 显示梯形方法:更高阶,计算函数的次数变成了 2 倍
- 如何比较:相同计算代价下比较
- 欧拉方法步长缩短一半,此时计算代价相同,但是此时全局误差只是变成了 \(\dfrac{1}{2}\),阶数没有改变,因此显式梯形方法更好
2.3 泰勒方法
- 所有阶数的方法都存在
- \(k\) 阶泰勒方法
\[ \begin{aligned} w_0&=y_0\\ w_{i+1}&=w_i+h{f(t_i,w_i)}+\dfrac{h^2}{2}f'(t_i,w_i)+\dfrac{h^3}{6}f''(t_i,w_i)+\cdots+\dfrac{h^k}{k!}f^{(k-1)}(t_i,w_i) \end{aligned} \]
\[ f'(t,y)=f_t(t,y)+f_y(t,y)y'(t)=f_t(t,y)+f_y(t,y)f(t,y) \]
很容易得到,局部截断误差为 \(O(h^{k+1})\),因此是 \(k\) 阶方法
一阶泰勒方法就是欧拉方法
二阶泰勒方法
\[ \begin{aligned} w_{i+1}&=w_i+h{f(t_i,w_i)}+\dfrac{h^2}{2}f'(t_i,w_i)\\ &=w_i+h{f(t_i,w_i)}+\dfrac{h^2}{2}(f_{t}(t_i,y_i)+f_y(t_i,y_i)f(t_i,y_i))\\ \end{aligned} \]
- 概念上,泰勒方法告诉我们任何阶的ODE方法都存在
- 但是,该方法由于计算公式中出现的函数 \(f\) 的偏导数,本身的性能也有损失
- 由于可以推出相同阶但是不需要计算偏导数的方法,泰勒方法仅仅用于特定的用途