GAMES103.王华民.04.Rigid Contacts
刚体碰撞
大纲
- 粒子的碰撞检测与响应
- penalty methods
- impulse methods
- 基于 impulse methods 的刚体碰撞检测与响应
- shape matching 方法
- 物理无关
粒子碰撞
- Particle Collision Detection and Response
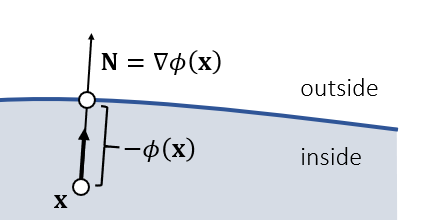
有向距离函数
- Signed Distance Function
- 用于表示一个点到某个表面的距离
- 正负表示内外
- 内部:负
- 外部:正
- 大小表示距离
- 正负表示内外
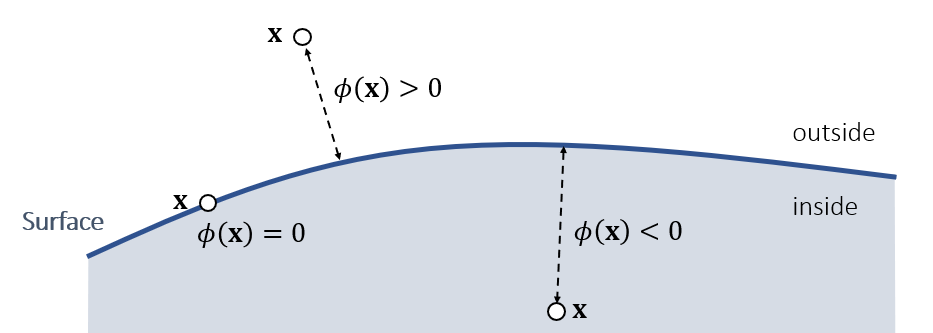
- 正好在表面上:zero surface
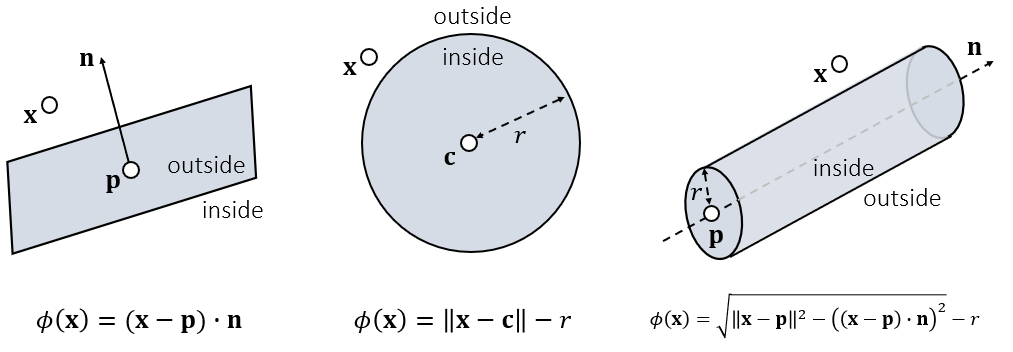
例子
- 表面、球体、无限长圆柱
相交计算
- Intersection
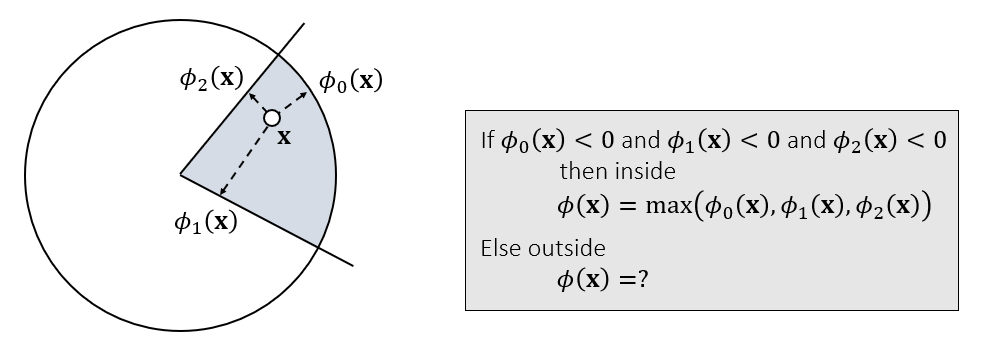
- 如果都小于 0,则在内部;否则在外部
- 在内部的时候,取 \(\max\),因为都是负数
- 在外部的时候,距离函数不一定是 \(\max\),可能和这三个值都不相关
- 对应最小值的那个点,可能不在相交的区域内部
- 但是碰撞检测我们都不关心外部的情况,因此不需要考虑具体的值(只有内部才相交)
求并计算
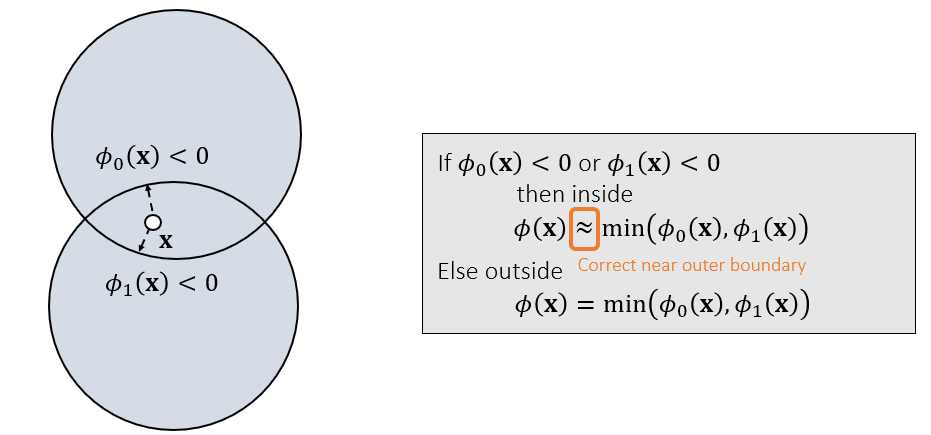
- 对应求并,在外部则直接取 \(\min\)
- 在内部则不一定,因为距离最小值对应的点可能不在并集的边界上(例如上图)
- 假设点比较靠近并集的外表面,可以使用取 \(\min\) 近似
- 另外一种做法,分别对这两个物体做碰撞检测
碰撞检测
- 利用有向距离函数做碰撞检测
- 有 \(\phi(\mathbf{x})<0\),则发生碰撞
碰撞响应
Penalty Method
- 设置一个处罚的力,把粒子从内部推出来
- 效果是滞后的,在下一步迭代中这个力才会生效
Quadratic Penalty Method
- penalty potential is quadratic
- 二次
- 弹簧力的大小正比于 \(\phi(\mathbf{x})\)
- 弹簧力的方向为对应 \(\phi(\mathbf{x})\) 的点的法向
- 示意图
- 表达式
- \(k\):penalty strength
\[ \mathbf{f}=-k\;\phi(\mathbf{x})\;\mathbf{N} \]
- 问题:只有粒子在内部才产生力
- 因此只有在穿模发生,才会有里把他推出来
- artifacts
Quadratic Penalty Method with a Buffer
- 可以预先加一个范围,当 \(\phi(\mathbf{x})<\epsilon\),则认为碰撞发生
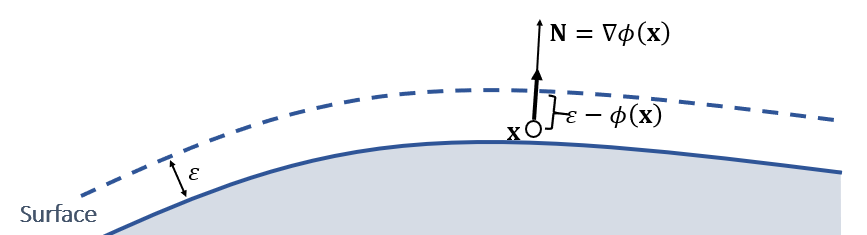
- 表达式
\[ \mathbf{f}=k\;(\epsilon-\phi(\mathbf{x}))\;\mathbf{N} \]
- 还是有问题
- 如何设置 \(k\) ?
- 太大:一碰就直接飞走了(over shooting)
- 太小:推不出来
- 如何设置 \(k\) ?
Log-Barrier Penalty Method
- 动态调整 \(k\) 的大小,和距离相关
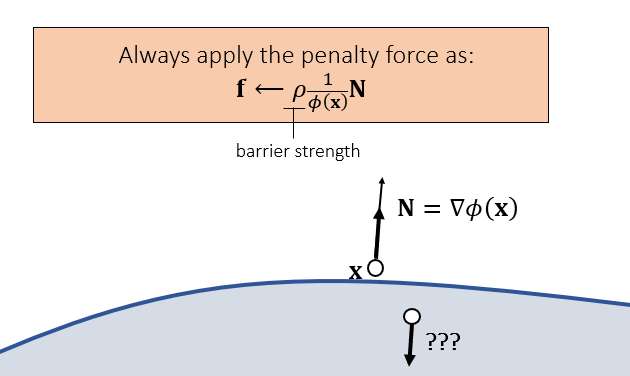
- 认为在内部不会发生
- 这样需要调整 \(\Delta{t}\) 的大小才能满足
- 小步长
- 为什么叫做 Log-Barrier Penalty Method
- 力可以认为是能量的导数,能量表达式中有 \(\log\) 的形式
- 问题
- over shooting 的发生还是很难避免
- 离得很近
- 可能穿透
- 如果穿透,则会越陷越深
- over shooting 的发生还是很难避免
Penalty Method 总结
- 需要调整步长
- 减少 overshooting 问题
- 保证 log-barrier 不穿透
- 可以给 log-barrier 方法加一个 buffer
- Li et al. 2020. Incremental Potential Contact: Intersection- and Inversion-free Large Deformation Dynamics. TOG.
- Wu et al. 2020. A Safe and Fast Repulsion Method for GPU-based Cloth Self Collisions. TOG.
- 很难做摩擦
- Frictional contacts are difficult to handle
Impulse Method
- 希望施加的力在这次迭代中马上有效果,而不滞后
- 在检测到碰撞之后,马上设置新的状态 \(\mathbf{x},\mathbf{v}\)
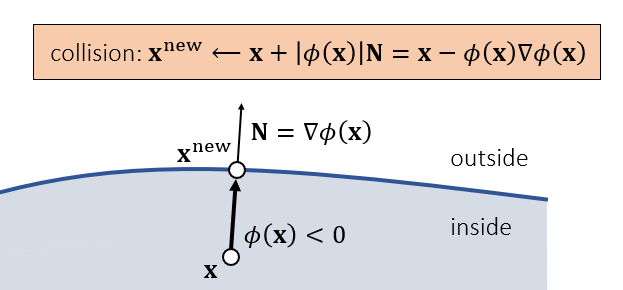
位置设定
- 直接平移到表面
速度设置
- 考虑摩擦
- 速度分解:法向 + 切向
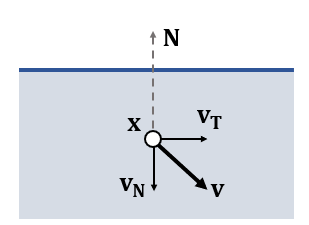
- 判断速度是否还是继续向物体内部,如果向物体内部则将其修改为朝外
- 法向分量反向
- 乘上一个 \([0,1]\) 之间的系数 \(\mu_{\mathbf{N}}\)
- 考虑摩擦力
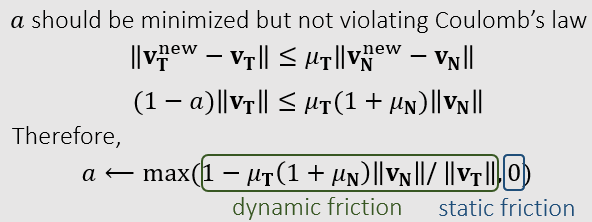
- 切向分量乘上一个摩擦系数 \(a\)
- 如何设置 \(a\)
- \(a\) 期望速度下降的最多(越小越好)
- 需要满足库仑摩擦定律
- 切向上速度变化不能小于法向上速度变化乘以系数 \(\mu_{\mathbf{T}}\)
- 摩擦力跟作用在摩擦面上的正压力成正比
- 切向上速度变化不能小于法向上速度变化乘以系数 \(\mu_{\mathbf{T}}\)
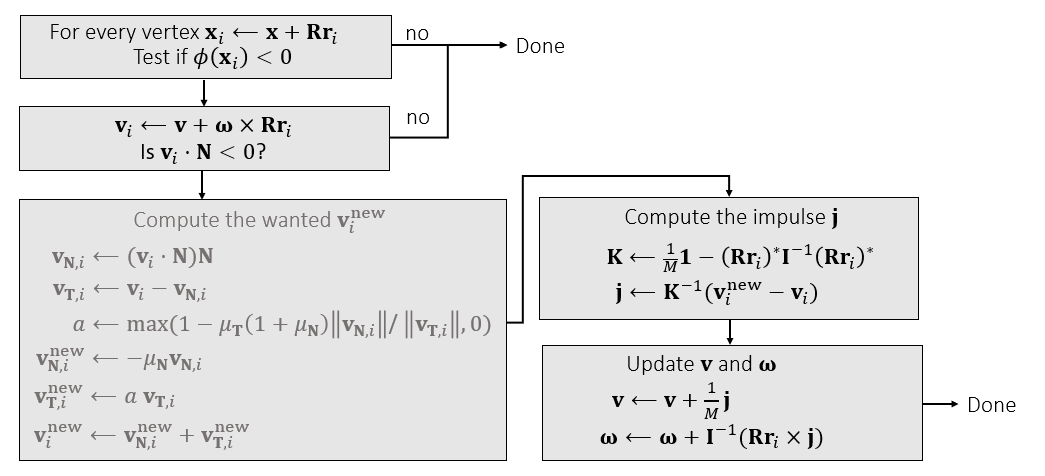
- 流程图

- 优点是能够加入对摩擦力的控制
- 处理起来相对比较麻烦
- 实际应用中
- 刚体模拟:impulse 方法还是挺多的
- 布料、弹性体:penalty 方法比较多
刚体碰撞
碰撞检测
- 如果物体由很多个点组成,可以对这些点遍历,对每一个点进行碰撞检测
- 如果有一个点碰撞上了,则就是碰撞上了
- 这种方法比较慢,但是也可以接受
碰撞响应
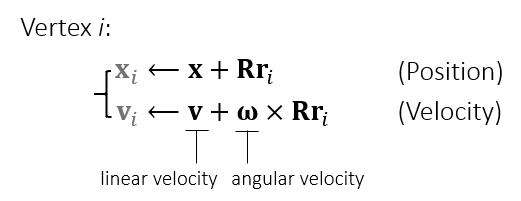
- 对于每一个节点,计算出来他们的位置 \(\mathbf{x}_i\) 和速度 \(\mathbf{v}_i\)
- 不能直接用这些点去更新,因为这些点都是虚拟的,直接更新不能满足刚体的性质
- 对于刚体而言,只有质心的 4 个属性(\(\mathbf{x,v,q,\omega}\))
impulse 方法
- 使用简化的 impulse 方法进行更新
- 不更新位置,只更新速度
- 对于刚体而言,直接修改位置状态比较麻烦,修改速度和角速度则相对简单
- 对整体施加一个冲量 \(\mathbf{j}\),实现对 \(\mathbf{x,v}\) 的更新
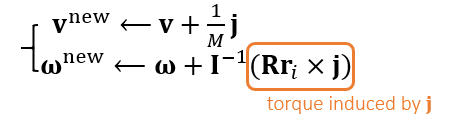
- 如何设置冲量 \(\mathbf{j}\)
- 考虑对整体设置了这样的冲量之后对单点的影响,因为我们能够通过上面的方式求得对单点的影响,因此能够反推求出 \(\mathbf{j}\)
- 如此便能够通过设定 \(\mathbf{j}\) 控制 \(\mathbf{v}_i,\mathbf{\omega}_i\) 的变化
对单点的影响
- 那么这样施加的冲量对每一个点造成的影响如下
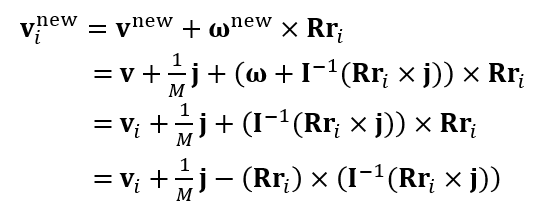
- 叉乘 \(\mathbf{r}\times\) 等价于一个矩阵乘 \(\mathbf{r}^{\ast}\)

- 进一步统一如下
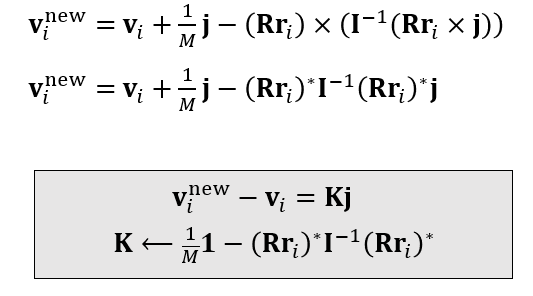
算法
实现细节
- 有多个点碰撞怎么处理?
- 求出这些点位置的平均值,对这个点做碰撞响应、计算冲量即可
- 不建议把每个点都算一遍,这样会导致最终计算得到的冲量偏大
- 因为其实你这个点计算得到的冲量也会对其他点造成影响
- 因为重力的存在,会导致物体一直在地面上抖动,掉下来弹上去,掉下来弹上去(oscillation)
- 加上一个衰减系数 \(\mu_{\mathbf{N}}\)
- 为什么不直接更新位置?
- 非线性问题,需要保持刚体的形状,直接更新可能会不满足刚体原来的形状
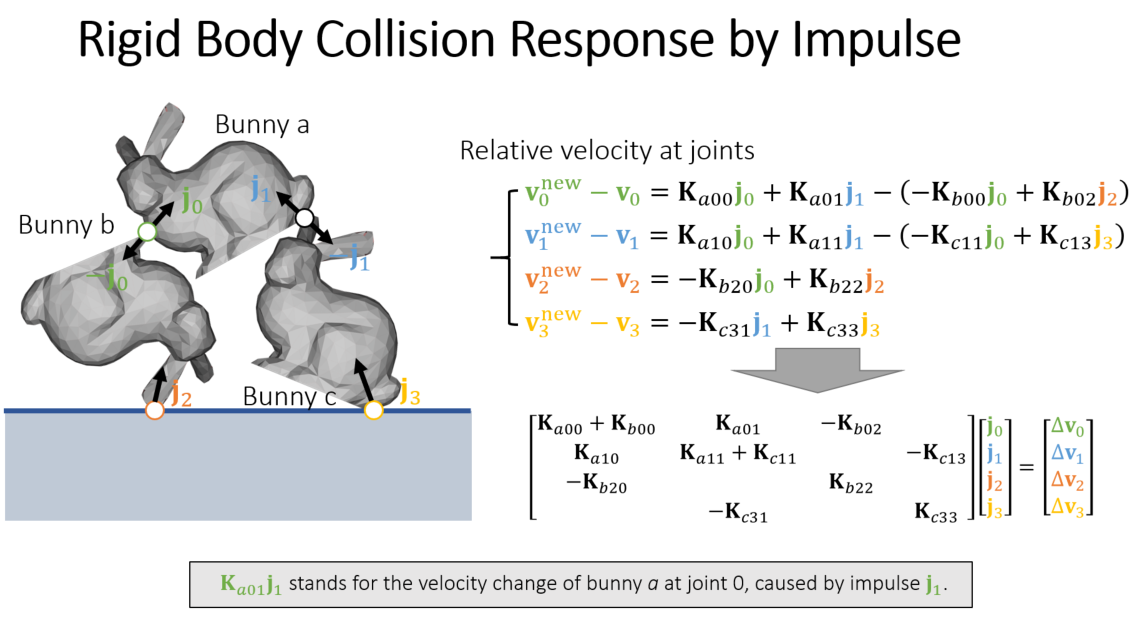
多个物体的碰撞
- 求解线性系统,因为他们直接互相影响
- 参考
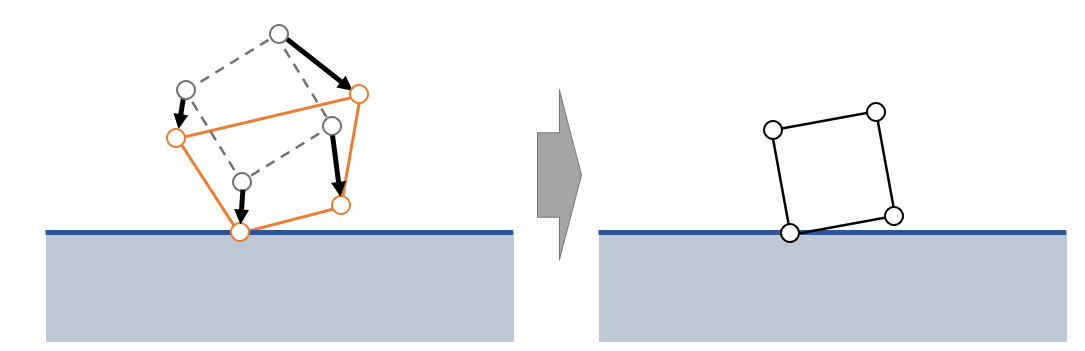
Shape Matching
- 思想
- 首先让所有的点沿着速度的方向运动(类似粒子系统)
- 处理碰撞、摩擦
- 然后再将形成的新节点聚回去,形成原来的形状
- 首先让所有的点沿着速度的方向运动(类似粒子系统)
- 第一步就是做一步简单的粒子模拟
- 第二步加限制求解比较复杂
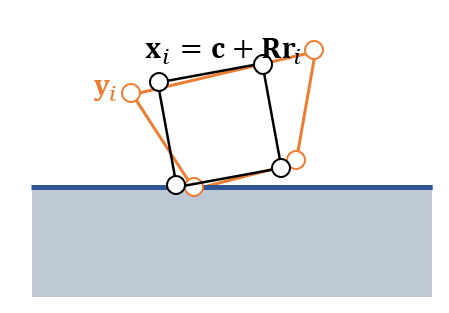
限制求解
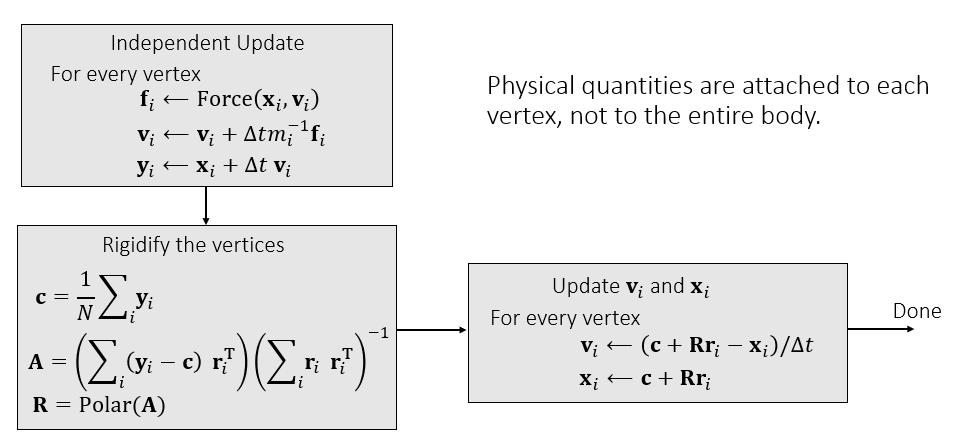
- 质心 \(\mathbf{c}\),旋转矩阵 \(\mathbf{R}\) 不知道,需要求解这两个量
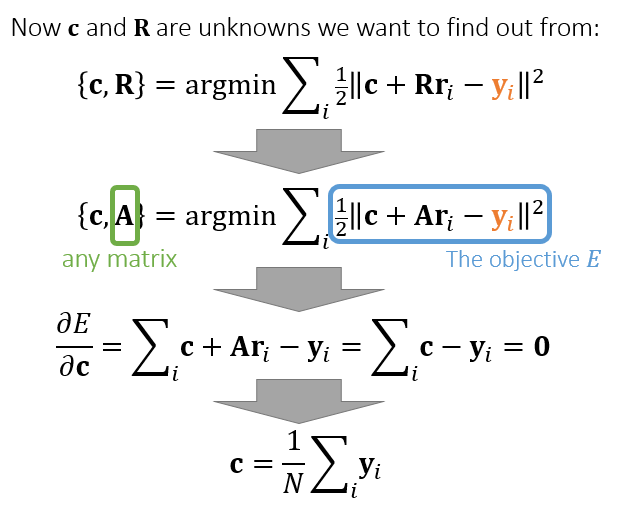
- 最小二乘
\[ \{\mathbf{c},\mathbf{R}\}=\arg\min\sum_{i}\Vert{\mathbf{c}+\mathbf{R}\mathbf{r}_i-\mathbf{y}_i}\Vert \]
- 放松限制,任意矩阵 \(\mathbf{A}\) 代替旋转矩阵
- 求极值,求导
- 求 \(\mathbf{c}\)
- \(\sum\mathbf{r}_i=\mathbf{0}\)
- 求 \(\mathbf{R}\)
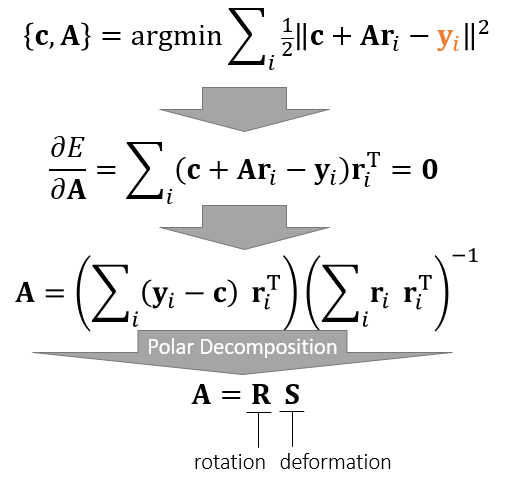
- 为什么对 \(\mathbf{A}\) 做 polar
deformation 能够得到旋转矩阵 \(\mathbf{R}\)
- 奇异值分解能够得到 3 个变换
- 经过处理我们能够将其转化为局部旋转 \(\times\) 形变的部分
- 因为是刚体,我们没有形变,舍去 \(\mathbf{A}\)
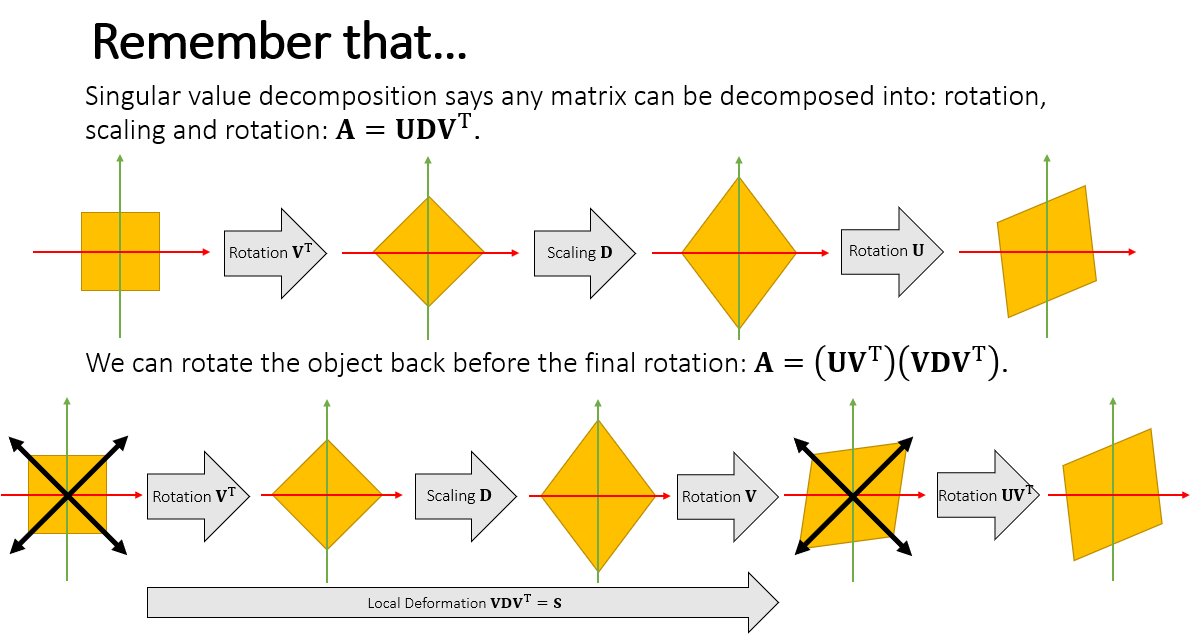
- polar deformation
- 直接法求解
- AN ALGORITHM TO COMPUTE THE SQUARE ROOT OF A 3 X 3 POSITIVE DEFINITE MATRIX
- 迭代法求解
- NUMERICAL RECIPES in C - The Art of Scientific Computing
- 直接法求解
算法流程
- 每一个顶点都有自己的位置、速度
评价
- 很容易实现
- 能够很好的模拟其他基于点的系统
- 布料、软体、粒子的流体
- 很难严格保证所有的约束都满足
- 满足一个约束可能会破坏其他约束
- 可以通过迭代的方式
- 当摩擦不是很重要的时候,可以使用 shape matching
- 接触不频繁,例如衣服上的纽扣
论文
- Muller et al. 2005. Meshless Deformations Based on Shape Matching. TOG (SIGGRAPH).