GAMES103.王华民.02.Math Background(2)
Math Background
Matrices
- 图形学中常见的 \(4\times4,3\times3\) 的矩阵
基本操作
- 转置:transpose
- 对称矩阵:symmetric
- \(\mathbf{A}^{\mathbf{T}}=\mathbf{A}\)
- 对角矩阵:diagonal
- 单位矩阵:identity
- \(\mathbf{I}\)
- 乘法
- 矩阵 乘 向量
- 矩阵 乘 矩阵
- 满足结合律,一般不满足交换律
\[ (\mathbf{AB})^{\mathbf{T}}=\mathbf{B}^{\mathbf{T}}\mathbf{A}^{\mathbf{T}} \]
\[ (\mathbf{A}\mathbf{A}^{\mathbf{T}})^{\mathbf{T}}=\mathbf{A}\mathbf{A}^{\mathbf{T}} \]
\[ (\mathbf{A}+\mathbf{A}^{\mathbf{T}})^{\mathbf{T}}=\mathbf{A}+\mathbf{A}^{\mathbf{T}} \]
- 求逆
\[ \mathbf{A}\mathbf{A}^{-1}=\mathbf{I} \]
\[ (\mathbf{AB})^{-1}=\mathbf{B}^{-1}\mathbf{A}^{-1} \]
- 正交矩阵
\[ \mathbf{A}\mathbf{A}^{\mathbf{T}}=\mathbf{I} \]
\[ \mathbf{A}^{-1}=\mathbf{A}^{\mathbf{T}} \]
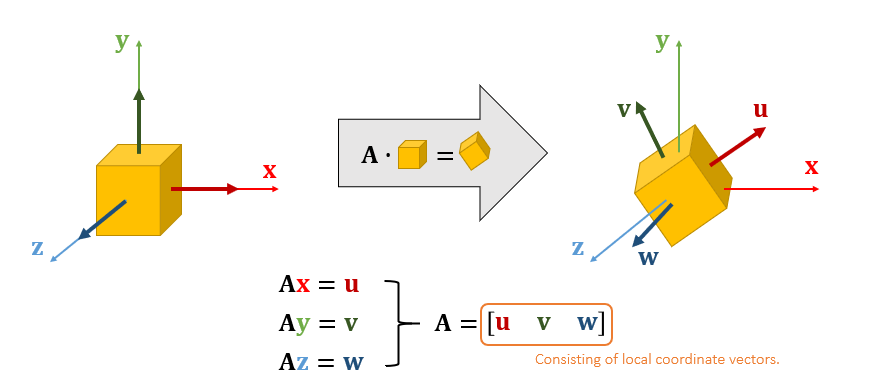
- 旋转变换:正交矩阵
- 旋转矩阵就是新的 \(xyz\) 轴在原来坐标系中对应的位置组成的矩阵
- 放缩变换
奇异值分解
- SVD
- Singular Value Decomposition
- 任意矩阵的奇异值分解
- 对角矩阵 \(\mathbf{D}\)
- 正交矩阵 \(\mathbf{U},\mathbf{V}\)
\[ \mathbf{A}=\mathbf{U}\mathbf{D}\mathbf{V}^{\mathbf{T}} \]
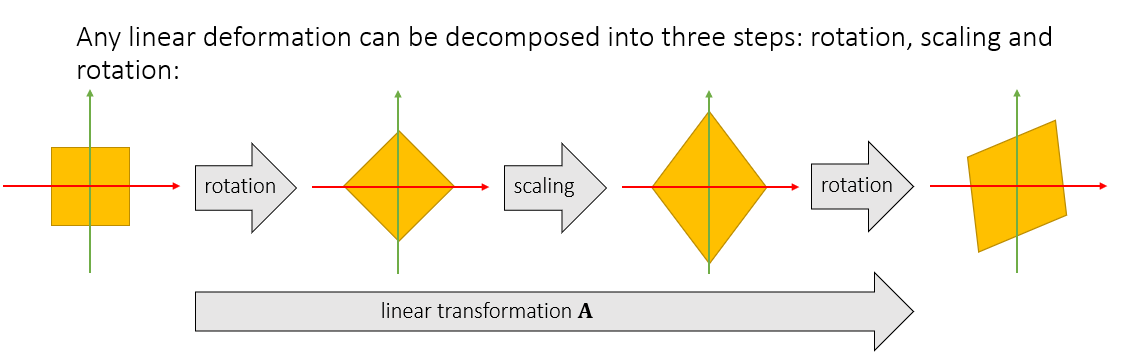
- 图形学中的某个解释
- 任何线性变换都可以通过如下三步实现
- 旋转 \(\mathbf{V}^{\mathbf{T}}\)、缩放 \(\mathbf{D}\)、旋转 \(\mathbf{U}\)
特征值分解
对称矩阵的特征值分解
对角矩阵 \(\mathbf{D}\)
正交矩阵 \(\mathbf{U}\)
\[ \mathbf{A}=\mathbf{U}\mathbf{D}\mathbf{U}^{\mathbf{T}} \]
- \(\mathbf{D}\) 的对角元素为特征值,\(\mathbf{U}\) 的列向量为特征向量
\[ \mathbf{A}\mathbf{u}_i=\mathbf{U}\mathbf{D}\mathbf{U}^{\mathbf{T}}\mathbf{u}_i=d_i\mathbf{u}_i \]
- 图形学中大多考虑的都是对称矩阵
- 非对称矩阵特征值可能会有虚数,图形学中不考虑虚数
对称正定矩阵
- Symmetric Position Definiteness
- s.p.d.
- 对称正定:\(\mathbf{v}^{\mathbf{T}}\mathbf{A}\mathbf{v}>0\)
- 对称半正定:\(\mathbf{v}^{\mathbf{T}}\mathbf{A}\mathbf{v}\ge0\)
- 对称正定 \(\Longleftrightarrow\) 特征值都大于 0
- 对角占优矩阵 \(\Longrightarrow\)
正定的(不一定是对称的)
- 每一行中,对角元素的绝对值大于剩余元素绝对值之和
- 对称正定矩阵一定是可逆的
\[ \mathbf{A}^{-1}=\mathbf{U}\mathbf{D}^{-1}\mathbf{U}^{\mathbf{T}} \]
Quiz
- \(\mathbf{A}\) 是对称正定的,证明 \(\mathbf{B}\) 是对称半正定的
\[ \mathbf{B}= \begin{bmatrix} -\mathbf{A}&\mathbf{A}\\ \mathbf{A}&-\mathbf{A}\\ \end{bmatrix} \]
- 定义出发证明即可

- 在物理模拟中经常遇到这样的矩阵,比较重要的性质
线性方程组求解问题
- 参考
- Linear Solver
\[ \mathbf{A}{\color{red}\mathbf{x}}=\mathbf{b} \]
- 方阵 \(\mathbf{A}\)
- square matrix
- 边界条件 \(\mathbf{b}\)
- boundary vector
- \(\mathbf{x}=\mathbf{A}^{-1}\mathbf{b}\)
- \(\mathbf{A}^{-1}\) 很难计算
- 带来计算问题、存储问题
- 稀疏矩阵 \(\mathbf{A}\) 可以优化存储,但是它的逆不稀疏
LU 分解
- 直接法求解线性方程组
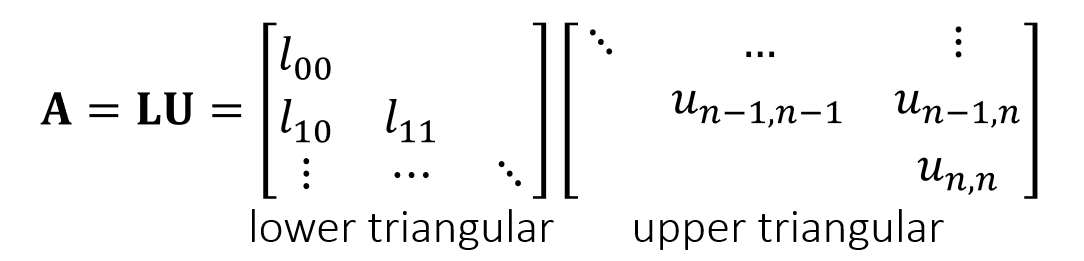
- LU 分解之后,求解矩阵的开销从 \(O(n^3)\) 变成 \(O(n^2)\)
特点
- 如果 \(\mathbf{A}\) 是稀疏的,\(\mathbf{L},\mathbf{U}\) 则没有那么稀疏
- 可以通过改变行列的顺序让 \(\mathbf{L},\mathbf{U}\) 的稀疏性变好
- 在进行 LU 分解之前会进行 permutation(重排行列)
- 计算分为两步
- 第一步分解 \(O(n^3)\)
- 如果 \(\mathbf{A}\) 固定,则只需要做一次
- 第二步求解 \(O(n^2)\)
- 第一步分解 \(O(n^3)\)
- 难以并行
- Intel oneMKL库
迭代方法求解
- 参考
- 松弛方法
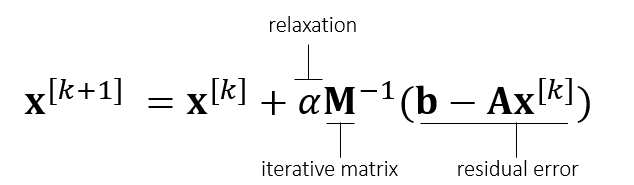
- \(\mathbf{I}-\alpha\mathbf{A}\mathbf{M}^{-1}\)
的谱半径小于 1 时收敛
- spectral radius
- \(\mathbf{M}\) 需要容易计算
- 雅可比方法:\(\mathbf{M}=\mathbf{I}\)
- 高斯赛德尔方法:\(\mathbf{M}=\mathrm{lower}(\mathbf{A})\)
- 共轭梯度法
- 切比雪夫加速
特点
- 好处
- 简单
- 不需要精确解的情况下,求解比较快
- 容易并行
- 缺点
- 存在收敛性问题
- 在某些情况下是能够保证收敛的
- 求精确解可能比较慢
- 存在收敛性问题