计算方法B.裴玉茹.07.特征值与奇异值(2)
- PPT(特征值)
特征值与奇异值
- 特征值:Eigenvalue
- 特征向量:Eigenvector
1. 定理
相似矩阵
- 若存在非奇异矩阵 \(S\),满足 \(A=S^{-1}BS\),则称矩阵 \(A\) 与矩阵 \(B\) 为相似矩阵
- 相似矩阵特征值相等
- 假定 \(x\ne0\)
- 那么有 \(S^{-1}BSx=Ax=\lambda x\)
- \(BSx=SAx=\lambda Sx\)
- 于是 \(\lambda\) 是矩阵 \(B\) 的特征值,\(Sx\) 是对应的特征向量
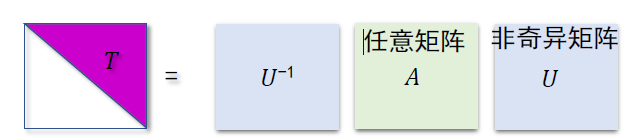
Schur 定理
- \(A\) 为任意矩阵,存在非奇异矩阵 \(U\) 使得 \(T=U^{-1}AU\),其中 \(T\) 为上三角矩阵,对角线元素为矩阵 \(A\) 的特征值
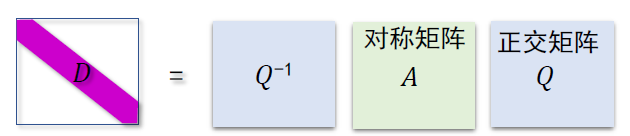
- 如果 \(A\) 是对称矩阵,则存在正交矩阵 \(Q\) 使得 \(D=Q^{-1}AQ=Q^{T}AQ\),其中 \(D\) 为对角线矩阵,对角线元素为矩阵 \(A\) 的特征值
- 如果 \(\Vert{Ux}\Vert_2=\Vert{x}\Vert_2\),\(U\) 为酉矩阵,具有保范性质
- 正交矩阵是酉矩阵
Jacobi 方法
- 用于求解实对称矩阵的特征值
- 通过旋转矩阵,构造相似矩阵
- 如下是 \({\color{red}Q^{T}}\)
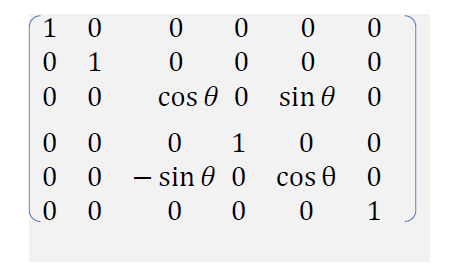
- 旋转矩阵 \(Q\):第 \(i,j\) 行出现和单位矩阵不一样的元素(\(\cos\theta,\sin\theta\))
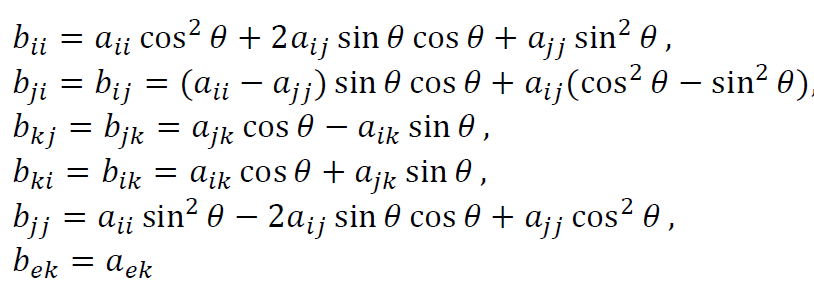
- 记 \(B=Q^{-1}AQ\),我们会发现 \(B\) 只有第 \(i,j\) 行和第 \(i,j\) 列和 \(A\) 不一样
\[ \left[\begin{matrix} b_{ii} & b_{ij} \\ b_{ji} & b_{jj} \\ \end{matrix}\right]=\left[\begin{matrix} c & -s \\ s& c \\ \end{matrix}\right]^T \left[\begin{matrix} a_{ii} & a_{ij} \\ a_{ji} & a_{jj} \\ \end{matrix}\right] \left[\begin{matrix} c & -s \\ s& c \\ \end{matrix}\right] \]
\[ \left[\begin{matrix} b_{ii} & 0 \\ 0 & b_{jj} \\ \end{matrix}\right]=\left[\begin{matrix} a_{ii}c^2+a_{jj}s^2+2csa_{ij} & cs(a_{jj}-a_{ii})+a_{ij}(c^2-s^2) \\ cs(a_{jj}-a_{ii}) + a_{ij}(c^2-s^2) & a_{jj}c^2+a_{ii}s^2-2csa_{ij} \end{matrix}\right] \]
- 整个矩阵结果如下
- 思路:不断地消去非对角线元素
- 正交变换 \(F\) 范数不变
- 上述变换后,对角线上的元素平方和变大了,非对角线上元素的平方和变小了
- 经过有限次变换,能够求得特征值
推论
- 如果矩阵 \(A\) 为对称矩阵,其 \(n\) 个特征向量构成单位正交集,矩阵 \(A\) 的特征值为实数
正定性与特征值
- 对称矩阵 \(A\)
为正定矩阵当且仅当矩阵 \(A\)
的所有特征值都是正数
- 利用特征向量正交、线性即证
- 证明
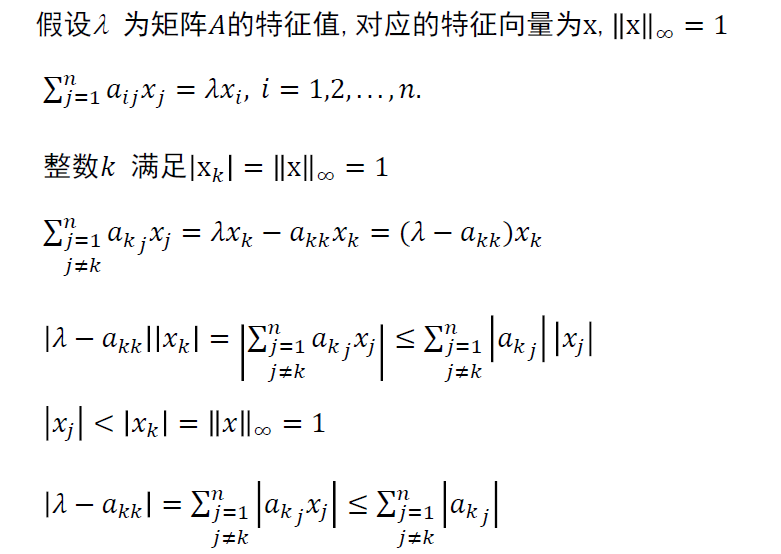
Gerschgorin 圆盘定理
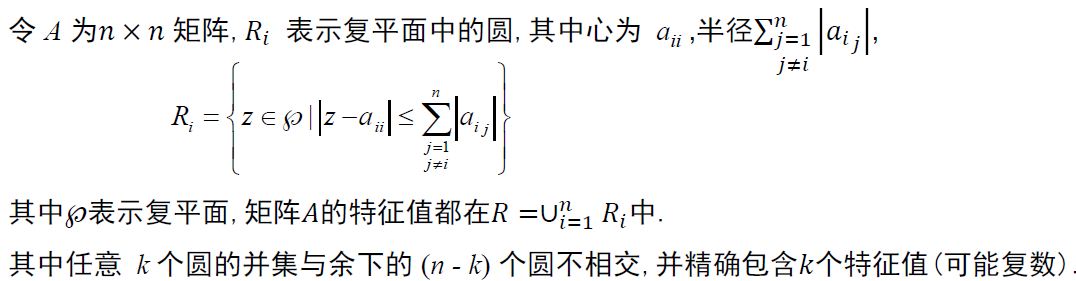
- \(k\) 个圆的并集指的是原本就相交形成的连通区域
- 证明
2. 幂方法
- note
- 占优特征值
- \(\lambda_1=\lambda_2=\cdots=\lambda_k\)
- \(\lambda_1=-\lambda_2\)
- 无法确定正负

逆幂方法
- \((A-qI)^{-1}x\) 使用幂方法
- \(q\) 的选择决定了收敛速度
- \(q\) 与特征值 \(\lambda_k\) 越接近,收敛越快
3. 收缩方法
- 在计算了主特征值的近似值后,可以通过紧缩获得矩阵其它特征值
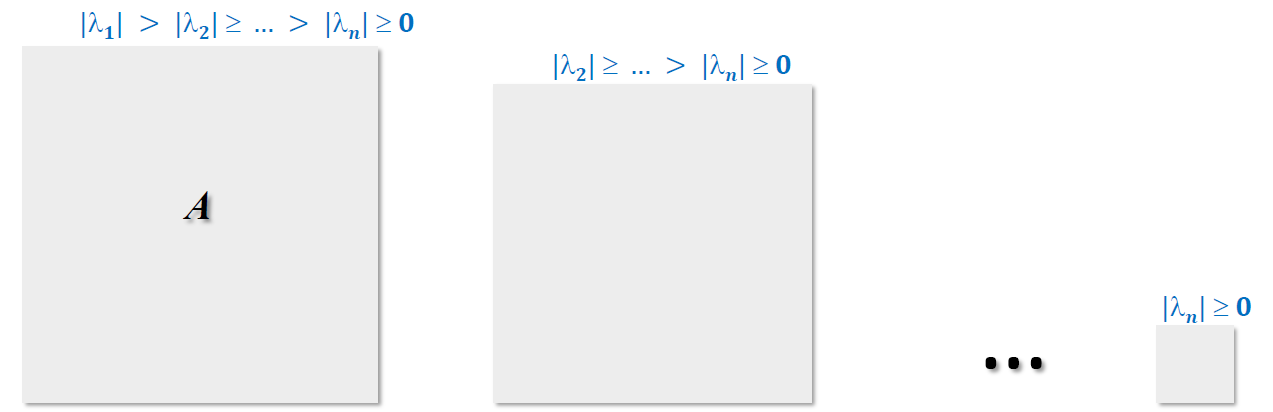
Wielandt 收缩
- 构造一个新的矩阵 \(B\),其特征值除了占优特征值之外与 \(A\) 相同,其中占优特征值被替换为 0
- 只有占有特征值与 \(A\) 不同
定理
- 假设 \(\lambda_1,\cdots,\lambda_n\) 是 \(A\) 的特征值,其特征向量 \(v^{(1)},\cdots,v^{(n)}\),且 \(\lambda_1\) 的重数为 1
- 设 \(x\) 为向量满足 \(x^{T}v^{(1)}=1\),则矩阵 \(B=A-\lambda_1v^{(1)}x^{T}\)
- \(B\) 的特征值为 \(0,\lambda_2,\cdots,\lambda_n\),特征向量为 \(v^{(1)},w^{(1)}\cdots,w^{(n)}\)
- \(v^{(i)}=(\lambda_i-\lambda_1)w^{(i)}+\lambda_1x^{T}w^{(i)}v^{(1)}\)
算法细节
- 如何构造 \(x\)
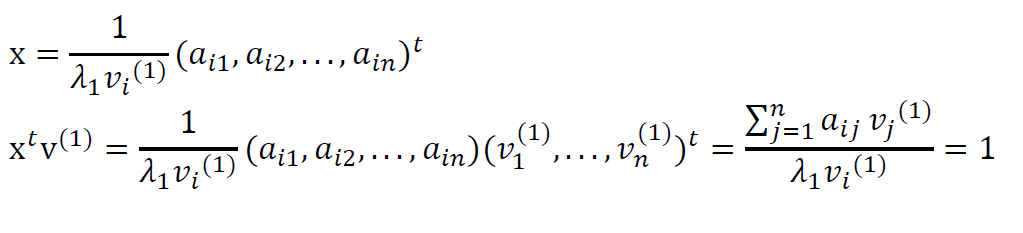
- 发现矩阵 \(B=A-\lambda_1v^{(1)}x^{T}\) 的第 \(i\) 行全为 0
- 代入即得
- \(Bw=\lambda w\)
- 因此,\(w\) 的第 \(i\) 个分量是 0,所以 \(B\) 的第 \(i\) 列对解没有贡献,去掉第 \(i\) 行和第 \(i\) 列得到 \((n-1)\times(n-1)\) 矩阵 \(B'\)
- 行列式展开的角度也行
- 因此,\(w\) 的第 \(i\) 个分量是 0,所以 \(B\) 的第 \(i\) 列对解没有贡献,去掉第 \(i\) 行和第 \(i\) 列得到 \((n-1)\times(n-1)\) 矩阵 \(B'\)
- 对 \(B'\) 应用幂方法,得到 \(\lambda_2\) 与 \(w'^{(2)}\), 并插入 0 得到 \(w^{(2)}\)
- 问题:易受舍入误差影响
Householder 变换
- \(P=I-2ww^{T}\),其中 \(w^{T}w=1,w\in\mathbb{R}^{n}\)
- \(P\) 是对称正交矩阵
目标
- 利用 Householder 方法计算对称三对角线矩阵 \(B\),其与给定的对称矩阵
\(A\) 相似
- 和这部分有些接近
步骤
- 定义矩阵变换 \(P^{(1)}\) 满足 \(A^{(2)}=P^{(1)}AP^{(1)}\)
- 显然 \(P^{(2)}\) 是对称矩阵,\(P^{(1)},A\) 都是对称矩阵
- 试图在变换后保证
- \(a_{11}^{(2)}=a_{11}\)
- \(w_1=0\) 即可
- \(a_{j1}^{(2)}=0,(j=3,\cdots,n)\)
- \(a_{11}^{(2)}=a_{11}\)
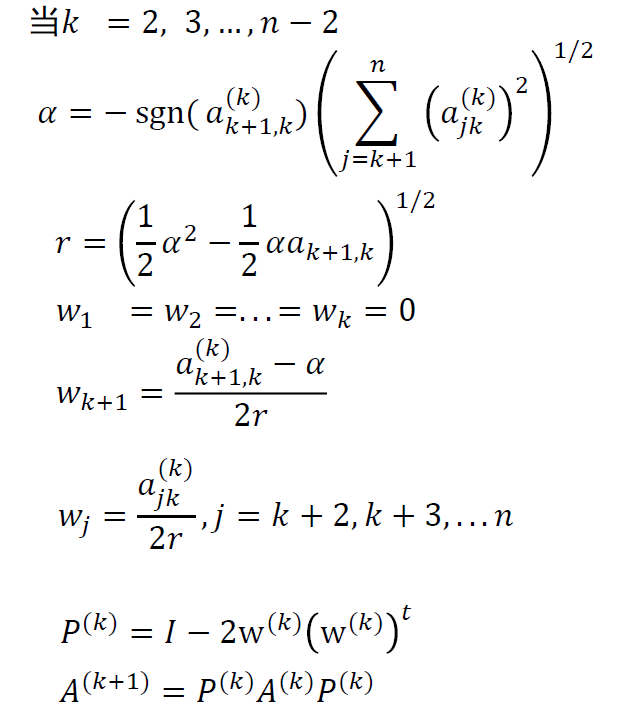
- 也就是说,利用 HouseHolder 变换将 \((a_{21},a_{31},\cdots,a_{n1})^{T}\) 转换为 \((\alpha,0,\cdots,0)^{T}\)
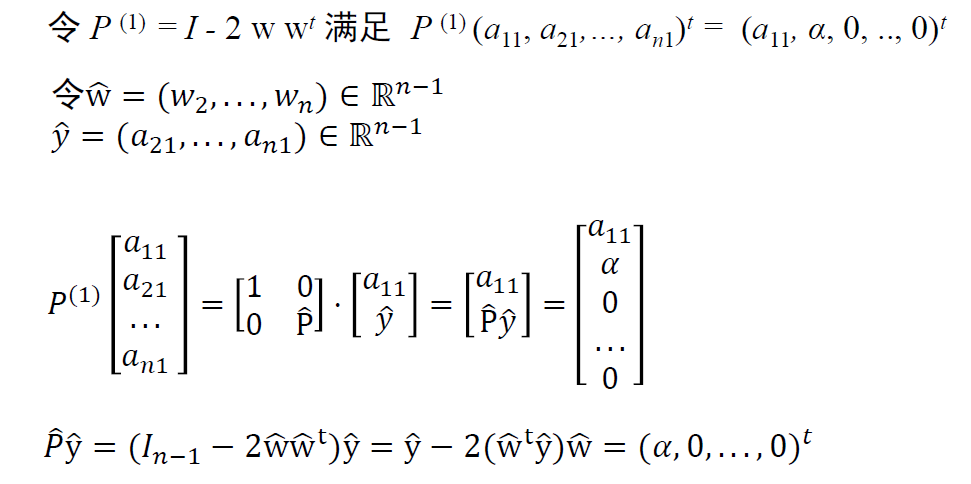
- \(\hat{w}^{T}\hat{y}\) 是 \(1\times1\) 的,因此可以提前
求解参数
- 计算具体的 \(\alpha\) 值
\[ \begin{array}{c} (\alpha,0,\cdots,0)=(a_{21}-rw_2,a_{31}-rw_3,\cdots,a_{n1}-rw_n)\\ 其中\ r=\hat{w}^{T}\hat{y}\\ \end{array} \]
\[ \begin{array}{c} \alpha=a_{21}-rw_2\\ a_{i1}-rw_i=0,i=3,\cdots,n\\ \end{array} \]
- 对 \(2rw_i\) 平方求和
\[ 4r^2\sum_{j=2}^{n}w_j^2=(a_{21}-\alpha)^{2}+\sum_{j=3}^{n}a_{j1}^{2} \]
- 左边:\(4r^{2}(1-w_{1}^{2})=4r^{2}\)
\[ 4r^{2}=-2\alpha a_{21}+\alpha^{2}+\sum_{j=2}^{n}a_{j1}^{2} \]
- 再由 \(P\) 的正交性
\[ \alpha^{2}=(\hat{P}\hat{y})^{T}(\hat{P}\hat{y})=\hat{y}^{T}\hat{P}^{T}\hat{P}\hat{y}=\hat{y}^{T}\hat{y}=\sum_{j=2}^{n}a_{j1}^{2} \]
- 结合上面两个式子,得到
\[ 2r^{2}=-\alpha a_{21}+\sum_{j=2}^{n}a_{j1}^{2}=-\alpha a_{21}+\alpha^{2} \]
- 可以求解得到 \(\alpha,w\)
\[ \alpha=-\mathrm{sgn}(a_{21})\sqrt{\sum_{j=2}^{n}a_{j1}^{2}} \]
\[ 2r^{2}=-\alpha a_{21}+\alpha^{2} \]
\[ \begin{array}{c} w_2=\dfrac{a_{21}-\alpha}{2r}\\ w_i=\dfrac{a_{i1}}{2r},i=3,\cdots,n \end{array} \]
- 之后的步骤类似前面的,收缩方法
4. QR 迭代
- QR 方法
- 同时确定对称矩阵所有特征值的矩阵约化方法
- QR 方法可以生成一组矩阵 \(A=A^{(1)},A^{(2)},\cdots,A^{(n)}\)
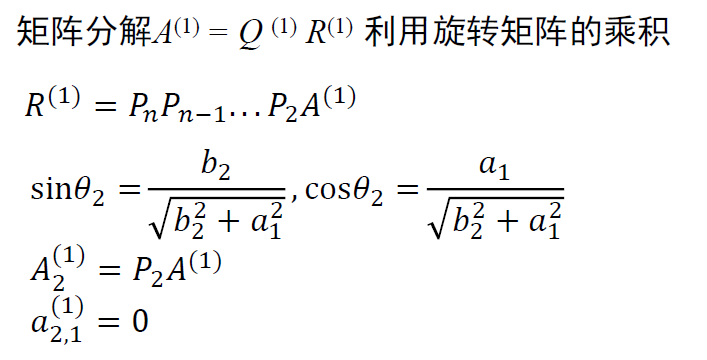
- \(A^{(1)}=A\) 分解为矩阵乘积 \(A^{(1)}=Q^{(1)}R^{(1)}\)
- \(Q^{(1)}\) 为正交矩阵
- \(R^{(1)}\) 为上三角矩阵
- \(A^{(2)}\) 定义为 \(A^{(2)}=R^{(1)}Q^{(1)}\)
- 接着继续对 \(A^{(2)}\) 进行 QR 分解
- 可以得到 \(A^{(i+1)}=(Q^{(i)})^{T}A^{(i)}Q^{(i)}\)
- 相似变换,特征值不变
- \(A^{(i+1)}\) 与 \(A^{(i)}\) 具有相同的特征值,\(A^{(i+1)}\) 变为对角线矩阵,其对角线上值为矩阵 \(A\) 的特征值

- \(Q^{\infty}\) 与 \(A^{\infty}\) 的特征向量相同
- \(AB=BA\) \(\Rightarrow\) \(A\) 与 \(B\) 具有相同的特征向量
- 由于 \(Q^{\infty}\) 是正交矩阵,\(Q^{\infty}\) 的特征值为 \(\pm1\)
- 假设 \(A^{\infty}x=\lambda x\),则有
\[ \lambda x=A^{\infty}x=Q^{\infty}R^{\infty}x=R^{\infty}Q^{\infty}x=\pm R^{\infty}x \]
- 得出结论
- \(A^{\infty}\) 的特征值与 \(A\) 的特征值相同
- 与 \(R^{\infty}\) 的特征值相同,即 \(R^{\infty}\) 的对角线元素(可能会差符号)
- 与 \(Q^{\infty}\) 的特征向量相同
构造 QR
- 考虑旋转矩阵
- 旋转矩阵为正交矩阵
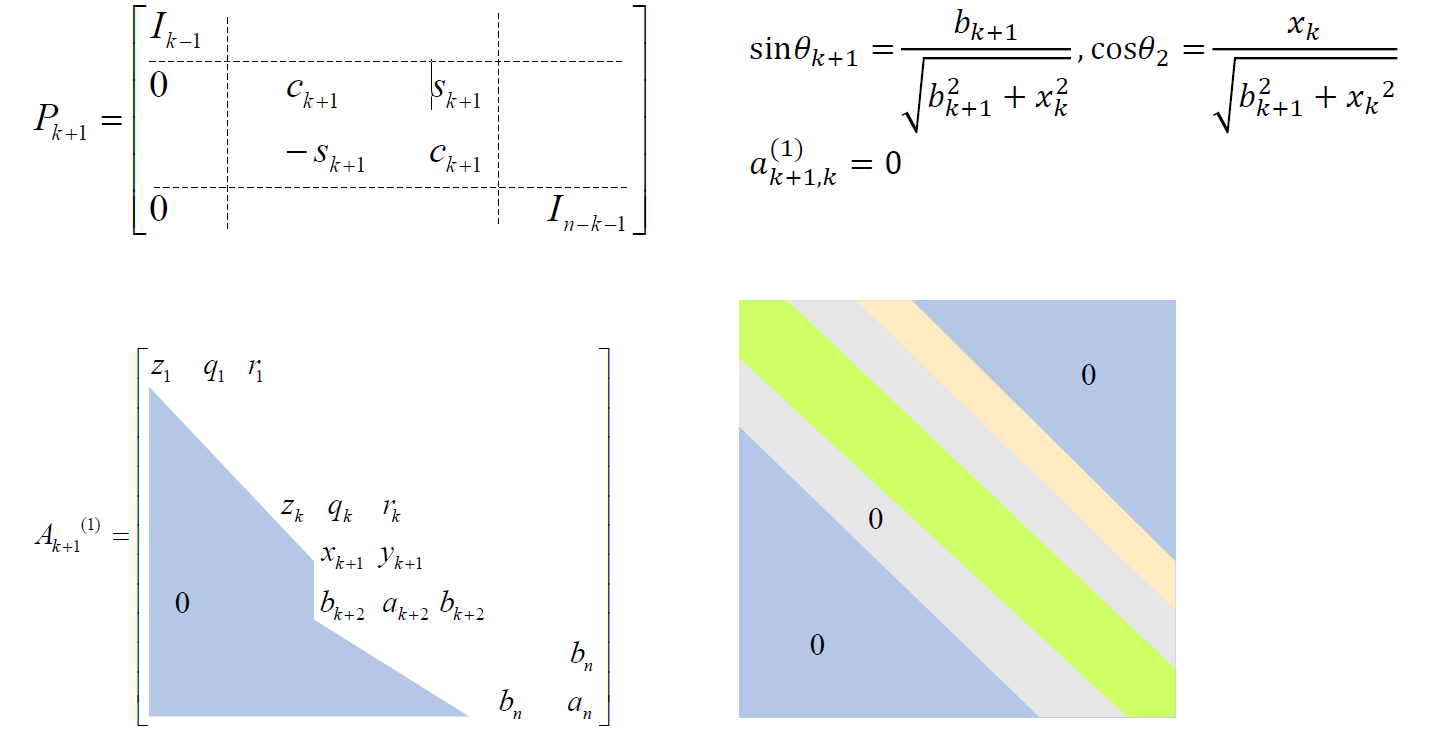
- \(p_{ii}=p_{jj}=\cos\theta,p_{ji}=-p_{ij}=\sin\theta\)
- 旋转矩阵为正交矩阵
三对角线稀疏矩阵
- 矩阵 \(A\)
为三对角线矩阵 ,对其使用旋转矩阵进行 QR 分解
- 让对角线以下元素变成 0
- (1,3) 可能变为非零向量,(1,4)、(1,n) 为 0
- 算法流程
- 矩阵 \(A\) 三对角线最上面一条对角线不一定需要和最下面相同,不需要为 \(b_n\)
- 接着使用上面的方法进行迭代
- \(A^{(2)}\) 对角线以外的项比 \(A^{(1)}\) 的相应项小,\(A^{(1)}\) 更接近对角矩阵
- 为什么 \(A^{(2)}\) 还是三对角线矩阵
?
- \(A^{(2)}=(Q^{(1)})^{T}A^{(1)}Q^{(1)}\)
- 因为旋转矩阵只会影响行列 \(i,j\)
- note
- 收敛速度
- 对于特征值\(\vert\lambda_1\vert>\vert\lambda_2\vert>\cdots>\vert\lambda_n\vert\)
- \(A^{(i+1)}\) 的元素 \(b_{j+1}^{(i+1)}\) 收敛到 0 的速度依赖于比值 \(\dfrac{\vert{\lambda_{j+1}}\vert}{\vert{\lambda_{j}}\vert}\),接近于 1 的时候收敛速度较慢
平移方法(三对角线)
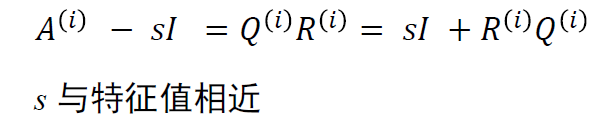
- 当 \(b_n^{(i+1)}\) 足够小,假设 \(\lambda_n\approx a_n^{(i+1)}\)
- 删除矩阵的第 n 行与第 n 列,计算 \(\lambda_{n-1}\)
- 收敛速度依赖于 \(\dfrac{\vert{\lambda_{j+1}-s}\vert}{\vert{\lambda_{j}-s}\vert}\) , 一般为三阶收敛速度 平移需要加回到特征值