计算方法B.裴玉茹.05.最小二乘(2)
- 数值分析课本第 4 章(最小二乘) + PPT(最小二乘法)
最小二乘
4. 广义最小余项(GMRES)方法
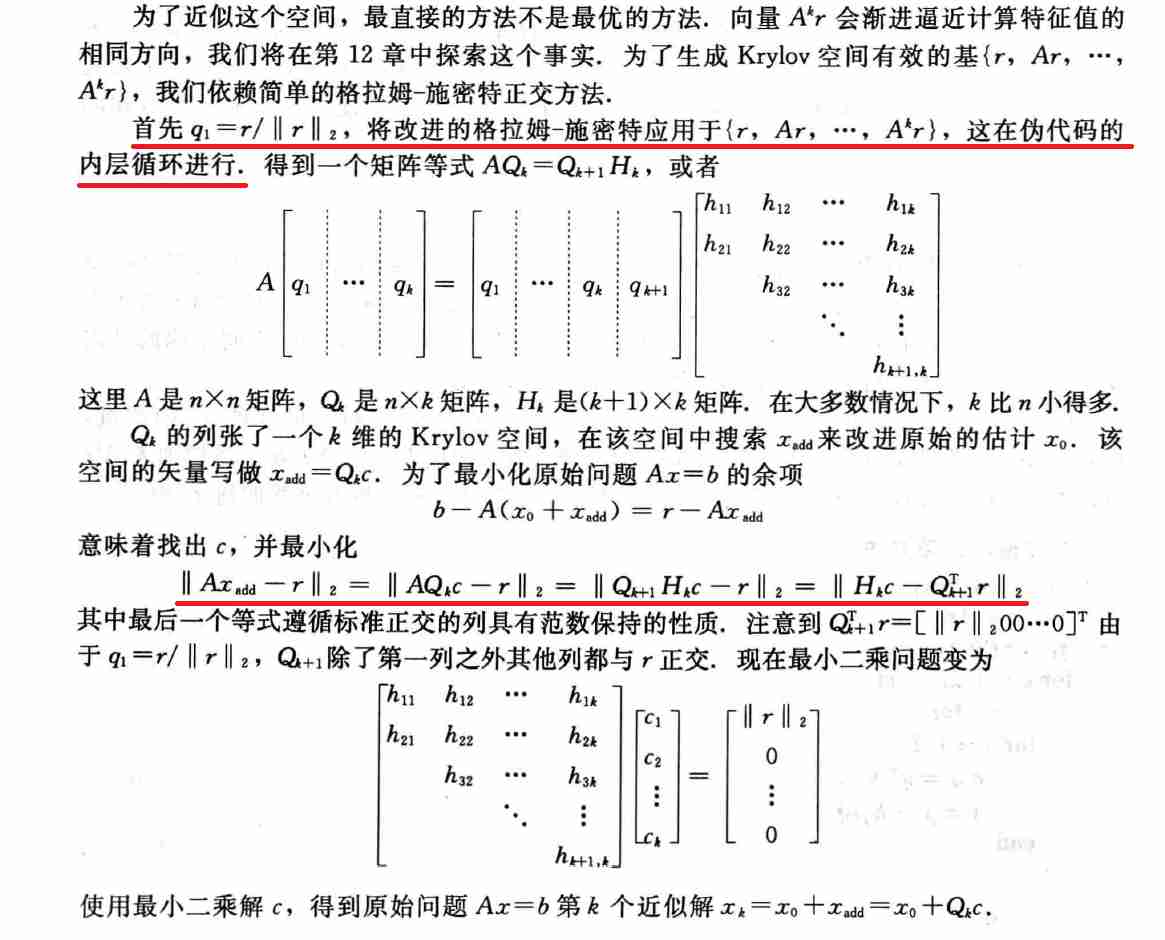
4.1 Krylov 方法
- GMRES 属于 Krylov 方法
- 这些方法依赖精确的 Krylov 空间的计算
- 该空间是向量 \(\{r,Ar,\cdots,A^{k}r\}\) 所张成的空间,\(r=b-A_0\) 为初始估计的余项
- GMRES 的思想是在特殊矢量空间(即 Krylov 空间)中寻找初始估计的 \(x_0\) 的改进
算法
- \(A:n\times n,Q_k:n\times k,H_k:(k+1)\times k\)
- \(k<n\)
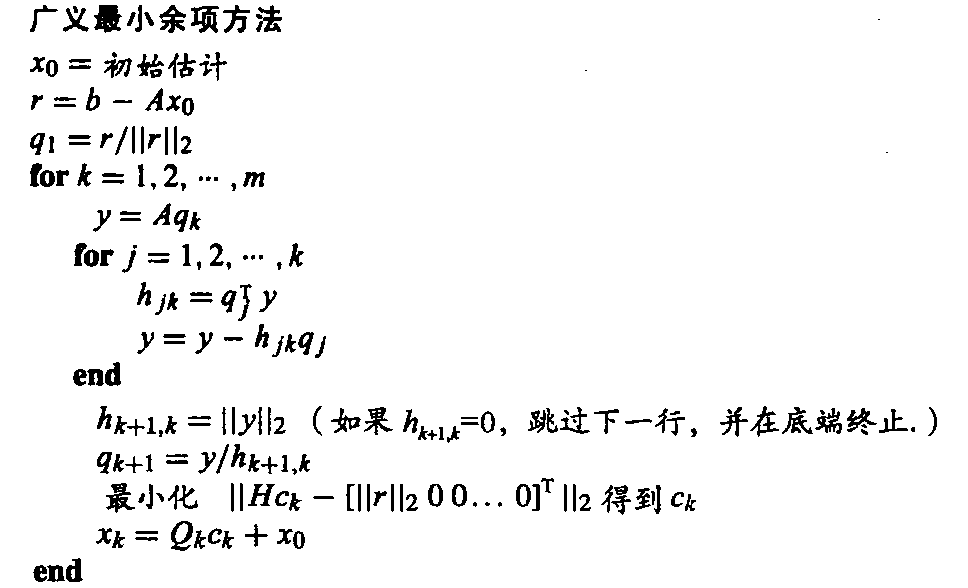
- 算法解释
- Krylov 空间由余项 \(r\) 和它与非奇异矩阵 \(A\) 的积所张成
- 在该方法的第 \(k\) 步,我们加入 \(A^{k}r\) 以扩大 Krylov 空间,重新对基进行正交化,然后通过最小二乘获取改进并加到 \(x_0\) 中

- 具体步骤解释
- 代价最高的是最小二乘的计算,如果 \(h_{k+1,k}=0\),则变成精确求解
误差分析
- 后向误差 \(\Vert{b-Ax_k}\Vert_2\)
随着 \(k\) 单调下降
- 由于最小二乘问题第 \(k\) 步在 \(k\) 维 Krylov 空间中最小化 \(\Vert{b-Ax_{add}}\Vert_2\) 得到 \(x_{add}\)
- 当 GMRES 运行下去,Krylov 空间逐步变大,因而下一个近似不会变差
实现的一些问题
- 最小二乘的步骤只有在需要求近似解 \(x_k\)
的时候才需要用到,因此并不是每一次都需要求
- \(x_k\) 只与之前的 \(x_0\)相关
- 条件数影响问题求解的话,可以使用豪斯霍尔德正交变换替换格拉姆-施密特正交变换
- GMRES 的典型用途是用于大规模稀疏的 \(n\times n\) 矩阵 \(A\)
- 理论上,算法经过 \(n\) 步终止,只要 \(A\) 是非奇异矩阵就可以得到解 \(x\)
- 在大多数情况下,目标是仅仅运行 \(k\) 步,\(k\) 比 \(n\) 要小得多
- 内存限制:矩阵 \(Q_k\) 过大,限制步数 \(k\)
重启 GMRES
- k 步迭代后没能足够趋近解,而继续操作可能收到内存限制(\(Q_k\) 太大),重启算法
- 让现在的 \(x_k\) 作为 \(x_0\) 重启算法
4.2 预条件 GMRES
- 非对称线性方程组:\(Ax=b\)
- 加入预条件子:\(M^{-1}Ax=M^{-1}b\)
算法
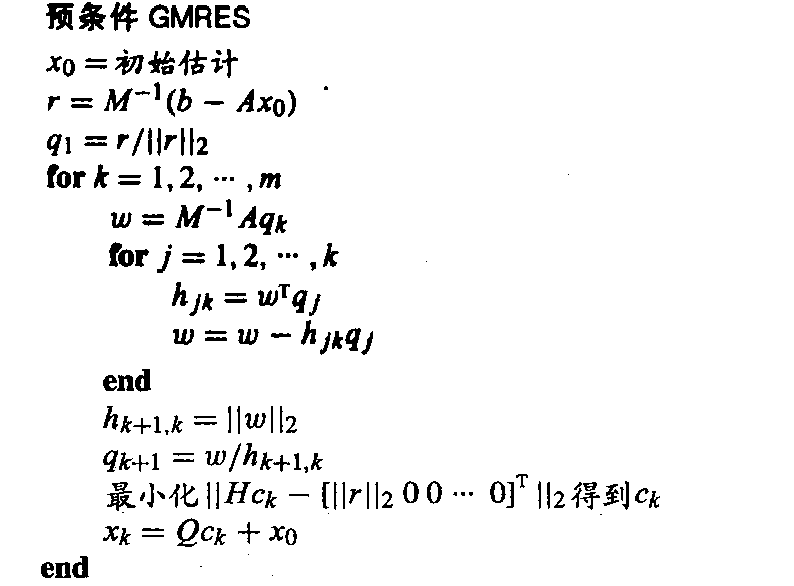
- 注意到这些步骤都不需要对 \(M^{-1}\) 进行显式定义,\(M^{-1}\) 可以通过回代完成,其中假设 \(M\) 是一个简单或者分解的形式
\[ x=M^{-1}y\Leftrightarrow y=Mx \]
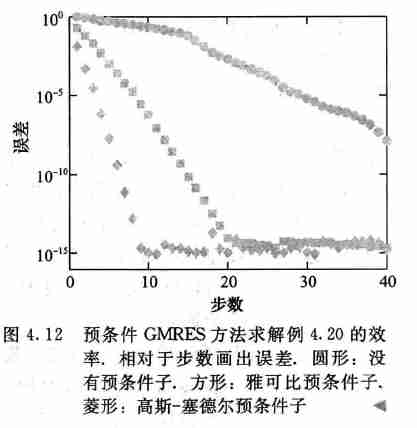
- 实验
5. 非线性最小二乘
- 线性方程组 \(Ax=b\)
的最小二乘解求解方法
- 法线方程
- QR 分解
- 非线性方程组?高斯牛顿方法!
5.1 高斯牛顿方法
- \(m\) 个方程,\(n\) 个未知变量的方程组
\[ \begin{array}{c} r_1(x_1,\cdots,x_n)=0\\ \cdots\\ r_m(x_1,\cdots,x_n)=0\\ \end{array} \]
- 误差平方和
- \(\dfrac{1}{2}\) 是为了简化后面模型
\[ E(x_1,\cdots,x_n)=\dfrac{1}{2}(r_1^2,\cdots,r_n^2)=\dfrac{1}{2}r^Tr \]
- 最小化 \(E\),让梯度 \(F(x)=\nabla{E(x)}=0\)
\[ F(x)=\nabla\left(\dfrac{1}{2}r^{T}(x)r(x)\right)=r^{T}(x)Dr(x) \]
- 现在我们需要使用多变量的牛顿法求解非线性方程组 \(F^{T}(x)=0\)
\[ F^{T}=(Dr)^{T}r \]
\[ D\big(F^{T}\big)=D\big((Dr)^{T}r\big)=(Dr)^{T}Dr+\sum_{i=1}^{m}r_iDc_i \]
- \(D\) 表示雅各比矩阵
\[ Dr=\begin{pmatrix} \dfrac{\partial{r_1}}{\partial{x_1}}&\cdots&\dfrac{\partial{r_1}}{\partial{x_n}}\\ \vdots&&\vdots\\ \dfrac{\partial{r_n}}{\partial{x_1}}&\cdots&\dfrac{\partial{r_n}}{\partial{x_n}}\\ \end{pmatrix} \]
- \(c_i\) 是 \(Dr\) 的第 \(i\) 列,\(Dc_i=Hr_i\),\(H\) 表示海森矩阵
\[ Hr_i=\begin{pmatrix} \dfrac{\partial^2{r_i}}{\partial{x_1}\partial{x_1}}&\cdots&\dfrac{\partial^2{r_i}}{\partial{x_1}\partial{x_n}}\\ \vdots&&\vdots\\ \dfrac{\partial^2{r_i}}{\partial{x_n}\partial{x_1}}&\cdots&\dfrac{\partial^2{r_i}}{\partial{x_n}\partial{x_n}}\\ \end{pmatrix} \]
- 简化方法舍去 \(m\) 步求和
- 本质上就是多便来给你牛顿法求解 \(F^{T}(x)=0\)
例题
- 平面上 3 个圆,求交点
(1) 最小二乘:高斯牛顿法
- 定义误差项
\[ \begin{array}{c} r_1(x,y)=\sqrt{(x-x_1)^2+(y-y_1)^2}-R_1\\ r_2(x,y)=\sqrt{(x-x_2)^2+(y-y_2)^2}-R_2\\ r_3(x,y)=\sqrt{(x-x_3)^2+(y-y_3)^2}-R_3\\ \end{array} \]
- 应用上述算法
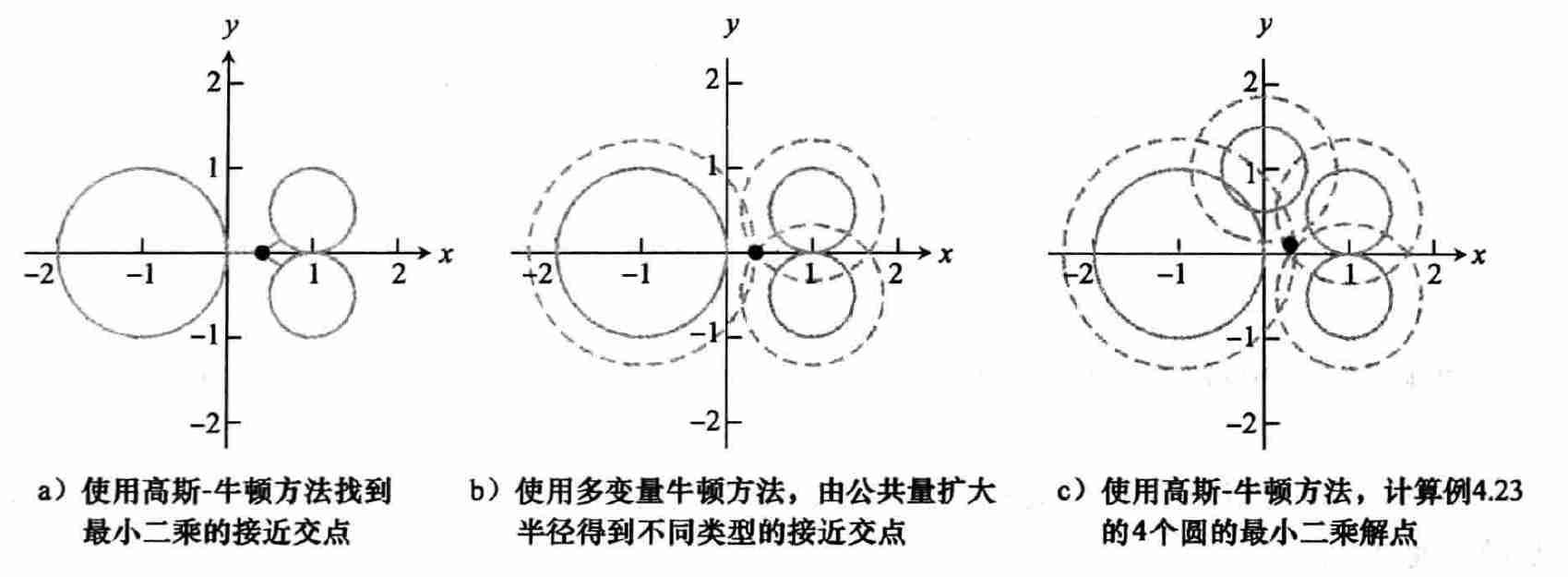
(2) 多变量牛顿方法
- 不直接去寻找交点,我们可以使用公共量扩大(或者缩小)圆的半径,直到它们具有一个公共的交点,这等价于求解系统
\[ \begin{array}{c} r_1(x,y,K)=\sqrt{(x-x_1)^2+(y-y_1)^2}-(R_1+K)=0\\ r_2(x,y,K)=\sqrt{(x-x_2)^2+(y-y_2)^2}-(R_2+K)=0\\ r_3(x,y,K)=\sqrt{(x-x_3)^2+(y-y_3)^2}-(R_3+K)=0\\ \end{array} \]
- 多变量牛顿方法求解
(3) 结合两种角度
- 但是和上面不是一个题目了

- 高斯牛顿,最小二乘
\[ \begin{array}{c} r_1(x,y,K)=\sqrt{(x-x_1)^2+(y-y_1)^2}-K=0\\ r_2(x,y,K)=\sqrt{(x-x_2)^2+(y-y_2)^2}-K=0\\ r_3(x,y,K)=\sqrt{(x-x_3)^2+(y-y_3)^2}-K=0\\ r_4(x,y,K)=\sqrt{(x-x_4)^2+(y-y_4)^2}-K=0\\ \end{array} \]
5.2 具有非线性参数的模型
- 例如:拟合函数 \(y_i=f_i(t)=c_1t_1^{c_2}\)
- 无法写成矩阵形式,而使用线性化则破坏了原有的最小二乘的定义
- 可以使用高斯牛顿方法求解
- 问题:收敛问题
- 最小二乘问题中的非线性带来额外的挑战。法线方程以及 QR 方法只要系数矩阵 A 满秩都可以找到唯一解
- 而对于非线性问题的高斯-牛顿迭代可能收敛到多个极小平方误差中的一个,尽可能使用初始向量的合理近似,有助于收敛到绝对极小
5.3 Levenberg-Marquardt 方法
- 当最小二乘系数矩阵变为病态时将会面临挑战。例如使用法线方程最小二乘求解 \(Ax=b\) 时会遇到大的误差,这是由于 \(A^TA\) 具有大的条件数
- 对于非线性最小二乘问题,情况通常会变得更糟。很多定义得很好的模型得到了条件数很差的
\(Dr\) 矩阵
- Levenberg-Marquardt 方法使用 “正则化项”
部分修复这个问题
- 可以看做是混合高斯-牛顿以及最速下降方法
- Levenberg-Marquardt 方法使用 “正则化项”
部分修复这个问题
- Levenberg-Marquardt 方法是高斯牛顿方法的简单改进
- \(\lambda\ne0\) 时,加强了矩阵
\(A^{T}A\)
对角元素的作用,通常可以改善条件数
- 可以允许更宽的初始估计并实现收敛
- 发展历程
- 这个方法最初由 Levenberg[1944] 提出,在高斯-牛顿方法的 \(A^TA\) 加入 \(\lambda I\) 以改进对应的条件。几年后,DuPont 的一位统计学家 D. Marquardt,改进了Levenberg 的提议,将单位矩阵替换为 \(A^TA\) 的对角线矩阵(Mar-quardt[1963])
- 系数 \(\lambda\)
- 尽管为了简单,我们将 \(\lambda\) 看做常数,但是该方法常常使用不同 \(\lambda\) 以适应问题,一般的策略是在每个迭代步骤中,只要余下的平方误差和在每步中降低就使用因子10连续降低 \(\lambda\),如果误差升高,则拒绝当前步,并以因子10升高 \(\lambda\)