计算方法B.裴玉茹.05.最小二乘
- 数值分析课本第 4 章(最小二乘) + PPT(最小二乘法)
最小二乘
1. 最小二乘法线方程
- 动机
- \(Ax=b\) 解不存在
- 存在不一致的方程
- 方程个数大于未知数个数
- 超定方程
- \(\to\) 使用最小二乘
1.1 不一致的方程组
\[ \left\{ \begin{array}{c} x_1+x_2=2\\ x_1-x_2=1\\ x_1+x_2=3\\ \end{array} \right. \]
- 显然上面方程组是无解的 \(\to\) 不一致的
- 最小二乘
- 与解最相似的向量 \(x\)
- 欧式距离相近
- 上面的方程等价于求向量 \(x\) 满足
\[ {x_1}\begin{bmatrix}1\\1\\1\\\end{bmatrix} +{x_2}\begin{bmatrix}1\\-1\\1\\\end{bmatrix} =\begin{bmatrix}2\\1\\3\\\end{bmatrix} \]
\[ \begin{array}{c} {x_1}v_1+{x_2}v_2=b\\ [v_1,v_2][x_1,x_2]^{T}=b\Leftrightarrow Ax=b\\ \end{array} \]
- 三个向量共面才有解
- 最小二乘:
- \(b\) 在 \(v_1,v_2\) 张成平面的投影记作 \(b'\)
- 近似解 \(\bar{x}\) 满足:\(v_1\bar{x}_1+v_2\bar{x}_2=b'\)
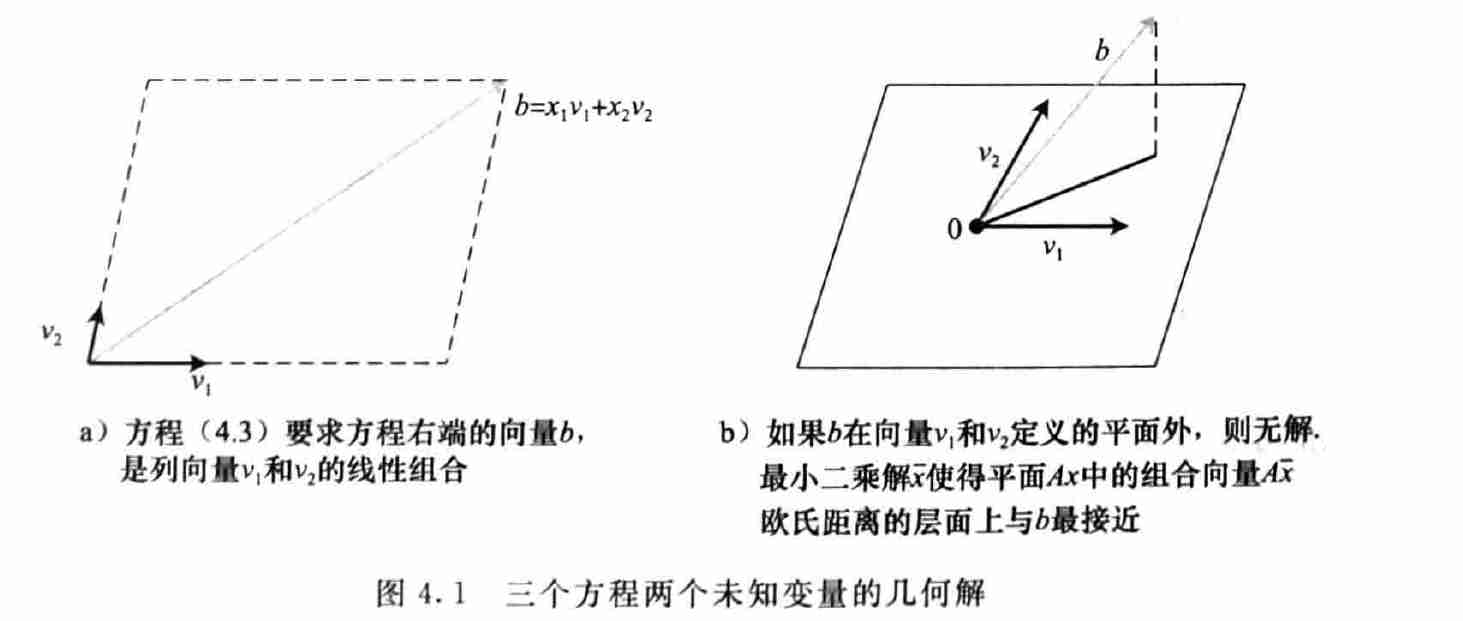
- 近似解满足
- 向量 \(b-A\bar{x}\) 和平面 \(\{Ax|x\in\mathbb{R}^{n}\}\) 垂直
- 转置
- \((A+B)^{T}=A^{T}+B^{T}\)
- \((AB)^{T}=B^{T}A^{T}\)
- 正交
- 最小二乘基于正交,从一点到一个平面的最短距离,由一个到平面的正交线段表示,法线方程可以确定该线段,这表示最小二乘的误差
- 向量垂直(正交):内积为 0
- 那么我们可以得到近似解的性质
- 对于任意 \(x\in\mathbb{R}^{n}\),有 \((Ax)^{T}(b-A\bar{x})=0\) 成立
\[ x^{T}A^{T}(b-A\bar{x})=0,\forall x\in\mathbb{R}^n \]
- 那么我们得到,\(n\) 维向量 \(A^{T}(b-A\bar{x})\) 和任意 \(n\) 维向量垂直(包括自身),于是有
\[ A^{T}(b-A\bar{x})=0 \]
- 最小二乘的解满足如下方程(也被称为法线方程)
\[ A^{T}A\bar{x}=A^{T}b \]
- 最小二乘的解能够最小化余项 \(r=b-Ax\) 的欧式长度
余项表示
- 欧式长度(2 范数)
\[ \Vert{r}\Vert_{2}=\sqrt{r_1^2+\cdots+r_{n}^2} \]
- 平方误差
\[ SE=\Vert{r}\Vert_2^2 \]
- 平均平方根误差
\[ RMSE=\sqrt{\frac{SE}{m}} \]
- 是等价度量
1.2 数据的拟合模型
最小二乘数据拟合
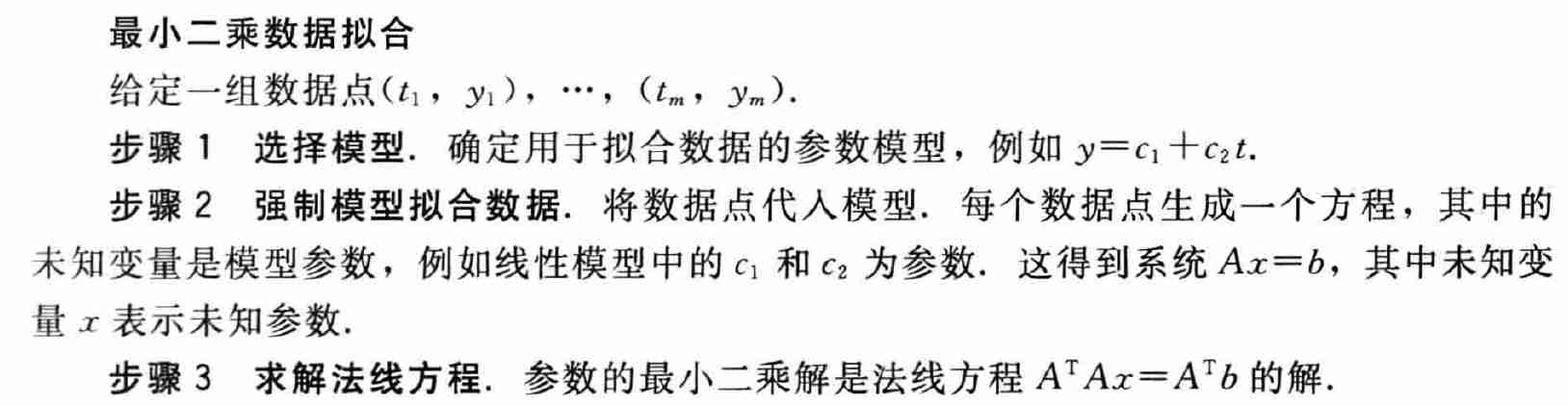
- 最小二乘是数据压缩的经典例子
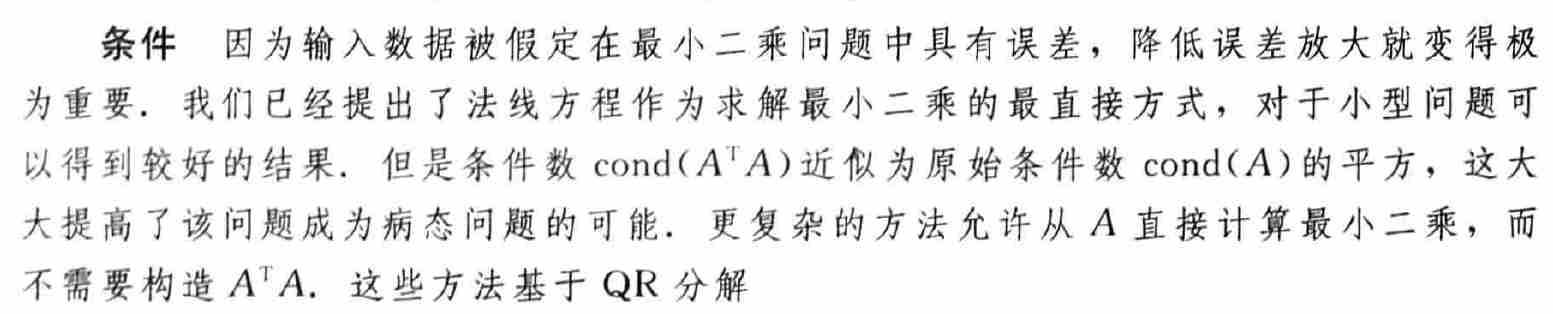
- 条件数
- 用 Eigen 库写了一下,感觉确实有些难顶,基本不是正常值
2. 模型概述
- 数据建模包含不同的模型
- 底层物理规律
- 经验公式
- ...
2.1 周期数据
- 周期数据使用周期模型
- 一日气温变化
\[ u=c_1+c_2\cos(2\pi t)+c_2\sin(2\pi t),\qquad t=\dfrac{24小时表示的时间}{24} \]
- 对于特定的基函数, 最小二乘问题可以大大简化
- 上述选择方式使得法线方程已经是对角线形式
- 可以增加阶数,添加项 \(c_3\cos(4\pi t)\)
2.2 数据线性化
指数模型
\[ y=c_1e^{c_2t} \]
- 非线性模型:系数不是线性的
- 方法1:非线性最小二乘问题
- 方法2:“线性化”
- 线性化
\[ \ln{y}=\ln{c_1}+c_2t=k+c_2t \]
- 求出 \(k,c_2\) 之后在求得 \(c_1,c_2\)
评价标准改变
- 实际上改变了评价标准
- 原来的评价标准:最小化如下式子
\[ \sum_{i=1}^{n}(c_1e^{c_2t_i}-y_i)^2 \]
- 线性化之后的评价标准:最小化如下式子
\[ \sum_{i=1}^{n}(\ln{c_1}+c_2t_i-\ln{y_i})^2 \]
- 具体使用哪一种形式,需要用户确定更需要最小化哪种误差,是原始意义的误差
幂法则模型
\[ y=c_1t^{c_2} \]
- 线性化
\[ \ln{y}=\ln{c_1}+c_2\ln{t}=k+c_2\ln{t_2} \]
- 实际例子
- 半衰期:\(y=c_1te^{c_2t}\Rightarrow \ln{y}-\ln{t}=\ln{c_1}+c_2t\)
3. QR 分解
3.1 格拉姆-施密特正交与最小二乘
- 格拉姆-施密特方法是对一组向量正交化
- 给定一组输人的 \(m\) 维向量,目的是找出正交坐标系统,获取由这些向量张成的空间,
- 更精确地讲,给定 \(n\) 个线性无关的输人向量,该方法计算 \(n\) 个彼此垂直的单位向量,张成和输入向量相同的子空间,单位长度由欧几里得(即 2 范数)进行定义
- 输入为 \(\mathbb{R}^m\) 中的 \(n\) 个线性无关向量 \(A_1,\cdots,A_n\)(\(n\le m\))
思路
- 定义问题为 \(P(n)\)
- 去除其中的一个向量 \(A_1\),作为最后生成的正交向量组中的一个向量
- 剩余向量做如下操作:\(A_i=A_i-(A_i\cdot
\dfrac{A_1}{\Vert{A_1}\Vert})\dfrac{A_1}{\Vert{A_1}\Vert}\)
- 减去 \(A_1\) 方向上的分量
- 此时剩余的向量与 \(A_1\) 都垂直,问题转化为剩余向量的 \(P(n-1)\) 问题
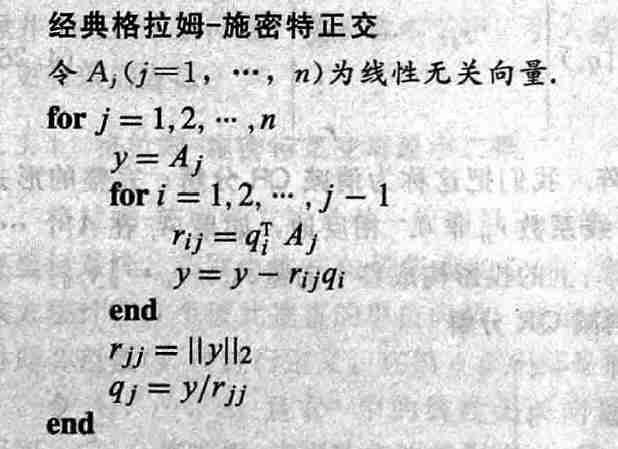
算法流程
- 初始化
\[ y_1=A_1,q_1=\dfrac{y_1}{\Vert{y_1}\Vert_2} \]
- 第 \(2\) 个向量
\[ y_2=A_2-q_1(q_1^{T}A_2),q_2=\dfrac{y_2}{\Vert{y_2}\Vert_2} \]
- \(\cdots\)
- 第 \(i\) 个向量
- 第二数学归纳法可以证明 \(q_i\) 和之前的向量 \(q_j/y_j\) 正交
\[ y_i=A_i-q_1(q_1^{T}A_i)-\cdots-q_{i-1}(q_{i-1}^{T}A_{i}),q_i=\dfrac{y_i}{\Vert{y_i}\Vert_2} \]
- \(\cdots\)
- 第 \(n\) 个向量
矩阵形式
- 矩阵 \(R\)
- \(r_{ii}=\Vert{y_i}\Vert_2\)
- \(r_{i,j}=q_i^{T}A_j,(i\le j)\)
- \(r_{i,j}=0,(i>j)\)
- 我们能够得到如下式子
- \(A_j\) 在各个正交向量上的投影之和
\[ A_j=r_{1,j}q_1+\cdots+r_{j-1,j}q_{j-1}+r_{j,j}q_j \]
- 矩阵形式如下
\[ \begin{pmatrix}A_1\cdots A_n\end{pmatrix} =\begin{pmatrix}q_1\cdots q_n\end{pmatrix}R =\begin{pmatrix}q_1\cdots q_n\end{pmatrix} \begin{bmatrix} r_{11}&r_{12}&\cdots&r_{1n}\\ &r_{22}&\cdots&r_{2n}\\ &&\ddots&\vdots\\ &&&r_{nn} \end{bmatrix} \]
- 简记为 \(A=QR\),称为消减 QR 分解
- 如果 \(A_j\) 线性无关,则主对角元全都非零
- 如果 \(A_j\) 在 \(A_1,\cdots,A_{j-1}\) 章程的线性空间中,那么 \(r_{jj}=0\)
- 如上的方法,我们称为是经典的格拉姆-施密特正交算法
- 总结
QR 分解的应用
- 求解 \(n\) 个方程 \(n\) 个未知数的系统 \(Ax=b\)
- 最小二乘
- 特征值计算
求解方程
- 假设 \(A\) 是非奇异矩阵
- \(Ax=b\Rightarrow QRx=b\Rightarrow
Rx=Q^{T}b\)
- \(Q\) 是正交矩阵,\(Q^{T}=Q^{-1}\)
- \(R\) 是上三角矩阵
- 复杂度约为 \(LU\) 的 3 倍
- 大概:\(n^3\) 乘法 + \(n^3\) 加法
- 感觉次数不太对,好像没把归一化的次数算上
- 大概:\(n^3\) 乘法 + \(n^3\) 加法
- \(Ax=b\Rightarrow QRx=b\Rightarrow
Rx=Q^{T}b\)
最小二乘
- 正交变换不改变向量的 2 范数
\[ \Vert{Ax}\Vert_2=(Ax)^{T}(Ax)=x^{T}A^{T}Ax=x^{T}(A^{T}A)x=x^{T}x=\Vert{x}\Vert_2 \]
- 那么我们可以推导得到,如果 \(A\) 是正交矩阵,\(\Vert{AB}\Vert_2=\Vert{B}\Vert_2\)
\[ \Vert{AB}\Vert_2=\max_{\Vert{x}\Vert_2\ne0}\dfrac{\Vert{ABx}\Vert_2}{\Vert{x}\Vert_2}=\max_{\Vert{x}\Vert_2\ne0}\dfrac{\Vert{Bx}\Vert_2}{\Vert{x}\Vert_2}=\Vert{B}\Vert_2 \]
- \(A\) 为 \(m\times n\) 矩阵(\(m\ge n\))
\[ \Vert{Ax-b}\Vert_2=\Vert{QRx-b}\Vert_2=\Vert{Rx-Q^{T}b}\Vert_2=\Vert{Rx-d}\Vert_2=\Vert{e}\Vert_2 \]
- 假定 \(r_{ii}\ne0\),\(A\) 满秩,那么有如下矩阵形式
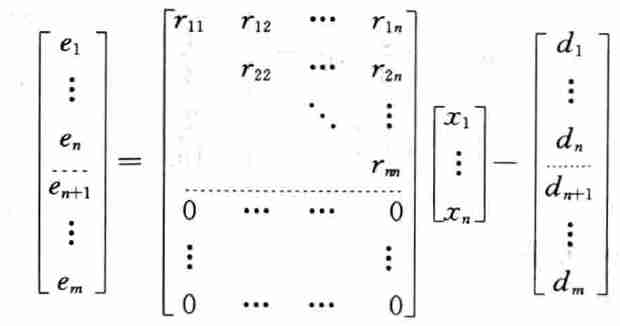
- 于是最小二乘误差:
\[ \Vert{e}\Vert_2=\sqrt{\sum_{i=n+1}^{m}d_{n+1}^{2}} \]
- 方程的最小二乘解:通过方程组回代即可计算得到 \(x\)
3.2 改进的格拉姆-施密特正交
- 微小改进可以在机器计算中改进精度,与原始方法在数学上等价
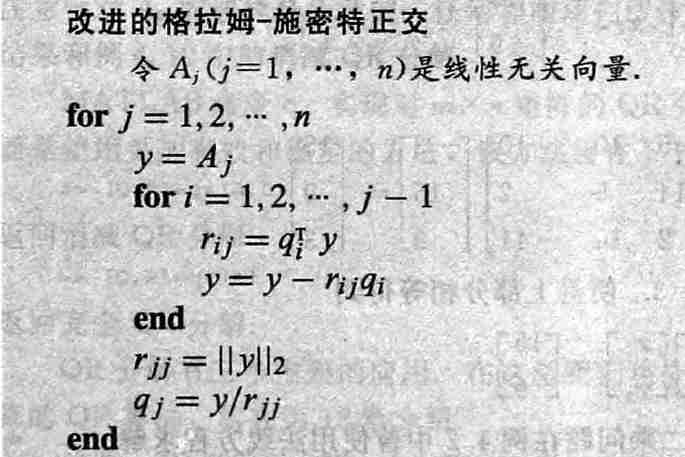
- 因为在第 \(i\) 步的时候,\(A_j\) 中已经不含有 \(q_1,\cdots,q_{i-1}\) 的成分了(都已经减去了),因此只需要做余项的投影
- 更加稳定
- 直观上讲,减少了 \(q_1,\cdots,q_{i-1}\) 成分计算带来的误差
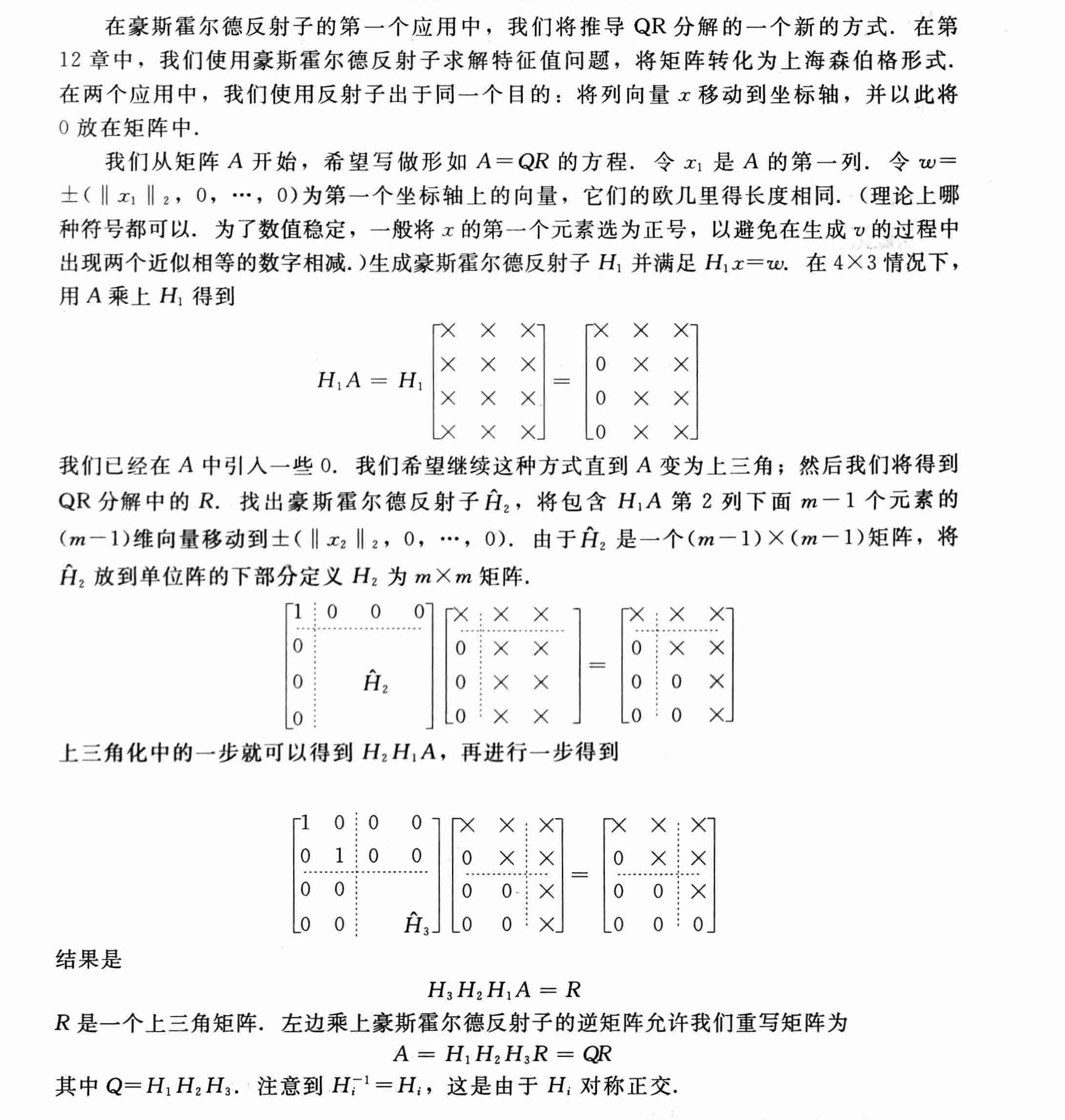
3.3 豪斯霍尔德反射子
- 相较改进的格拉姆-施密特正交化方法
- 更少的计算
- 舍入误差的角度而言,更加稳定
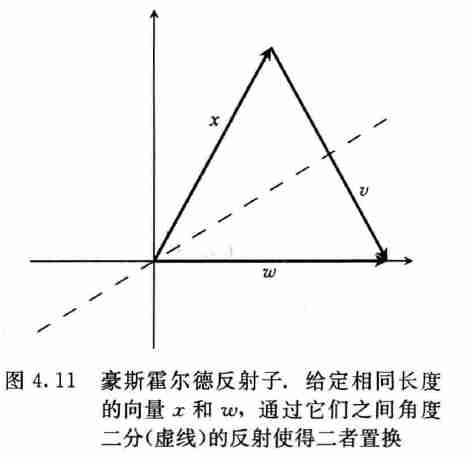
- 豪斯霍尔德反射子是正交矩阵,通过 \(m-1\) 维平面反射 \(m\) 维向量
- 每个向量乘上矩阵之后,长度不变
- 给定一个向量 \(x\),我们要重新找出一个相同长度的向量 \(w\),计算豪斯霍尔德反射得出矩阵 \(H\) 满足 \(Hx=w\)
- 原始方法
- 画出 \(m-1\) 维平面二分 \(x\) 和 \(w\),并连接他们的向量垂直,并且通过该平面反射所有向量
投影矩阵
- \(\Vert{x}\Vert_2=\Vert{w}\Vert_2\Rightarrow(w-x)^{T}(w+x)=0\)
- 正交
- 定义 \(v=w-x\),投影矩阵 \(P=\dfrac{vv^{T}}{v^{T}v}\)
- 投影矩阵满足 \(P^{2}=P\)
\[ P^{2}=\dfrac{vv^{T}vv^{T}}{(v^{T}v)^2}=\dfrac{v(v^{T}v)v^{T}}{(v^{T}v)^2}=\dfrac{(v^{T}v)vv^{T}}{(v^{T}v)^2}=\dfrac{vv^{T}}{v^{T}v}=P \]
- 上述 \(P\)
- 对称投影矩阵
- 证明 \(P^{T}=P\) 即可
- \(Pv=v\)
- 对于任意向量 \(u\),\(Pu\) 是 \(u\) 在 \(v\) 上的投影
- 投影定义即证
- 对称投影矩阵
豪斯霍尔德反射子
- 如上图,\(x-2Px=w\)
- 定义 \(H=I-2P\)
- \(Pv=v\)
- \(v^{T}(x+v)=(x-v)^{T}(x+v)=0\)
\[ \begin{aligned} Hx&=Ix-2Px=x-2Px\\ &=w-v-\dfrac{2vv^{T}x}{v^{T}v}\\ &=w-Pv-\dfrac{2vv^{T}x}{v^{T}v}\\ &=w-\dfrac{vv^{T}v+vv^{T}x+vv^{T}(w-v)}{v^{T}v}\\ &=w-\dfrac{vv^{T}(x+v)}{v^{T}v}\\ &=w-\dfrac{vv^{T}(x+v)}{v^{T}v}\\ &=w\\ \end{aligned} \]
- \(H\) 即为豪斯霍尔德反射子
- \(H\) 是对称的
- \(I,P\) 都是对称的
- \(H\) 是正交的
\[ H^{T}H=HH=(I-2P)(I-2P)=I-4P+4P^2=I \]
QR 分解
- 计算代价,\(n\times n\) 矩阵
- 乘法:\(\dfrac{2}{3}n^{3}\)
- 加法:\(\dfrac{2}{3}n^{3}\)
- 怎么算出来的,这么低?没搞懂