计算方法B.裴玉茹.03.方程组(3)
- 数值分析课本第 2 章(方程组) + PPT(非线性方程组迭代求解)
方程组
6. 用于对称正定矩阵的方法
- 楚列夫斯基(Cholesky) 分解
6.1 对称正定矩阵
正定矩阵定义与性质
- 对称矩阵:\(A^{T}=A\)
- 正定矩阵:对任意的向量 \(x\ne0\),都有 \(x^{T}Ax>0\)
- 对称正定矩阵是非奇异矩阵
- 不存在非零向量 \(x\) 使得 \(Ax=0\)
- \(A\) 是正定矩阵 \(\Leftrightarrow\) \(A\) 的所有特征值为正数

- \(n\times n\) 的对称正定矩阵 \(A\),\(n\times
m\) 的满秩矩阵 \(X\)(\(n\ge m\)),则 \(X^{T}AX\) 是 \(m\times m\) 的对称正定矩阵
- 对称:\((X^{T}AX)^{T}=X^{T}AX\)
- 正定:非零 \(m\) 维向量 \(v\),\(v^{T}(X^{T}AX)v=(Xv)^{T}A(Xv)\)
- \(A\) 是正定矩阵,如果 \(Xv\ne0\) ,则 \(v^{T}(X^{T}AX)v>0\)
- \(X\) 满秩 \(\Rightarrow\) 列向量线性无关 \(\Rightarrow\) \(Xv=0\Leftrightarrow v=0\)
- \(Xv\) 是对 \(X\) 列向量的线性组合
主子矩阵

- 任何对称正定矩阵的主子矩阵也是对称正定矩阵
- 假设主子矩阵 \(M\) 选中的是第 \(i_1,i_2,\cdots,i_k\) 列,那么他选中的就是第 \(i_1,i_2,\cdots,i_k\) 行
- 任意向量 \(v=(v_1,\cdots,v_k)^{T}\)
\[ \begin{aligned} v^{T}Mv&=\sum_{y=1}^{k}\sum_{x=1}^{k}v_xm_{x,y}v_y\\ &=\sum_{y=1}^{k}\sum_{x=1}^{k}v_xa_{i_{x},i_{y}}v_y \end{aligned} \]
- 构造向量 \(u\),满足如下结果
\[ u_j= \left\{ \begin{array}{ll} v_k&j=i_k\\ 0&else\\ \end{array} \right. \]
- 那么有
\[ \begin{aligned} u^{T}Au&=\sum_{y=1}^{n}\sum_{x=1}^{n}u_xa_{x,y}u_y\\ &=\sum_{y=1}^{k}\sum_{x=1}^{k}u_{i_x}a_{i_{x},i_{y}}u_{i_y}\\ &=\sum_{y=1}^{k}\sum_{x=1}^{k}v_xa_{i_{x},i_{y}}v_y \end{aligned} \]
- 所以
\[ v^{T}Mv=u^{T}Au>0 \]
6.2 楚列斯基分解
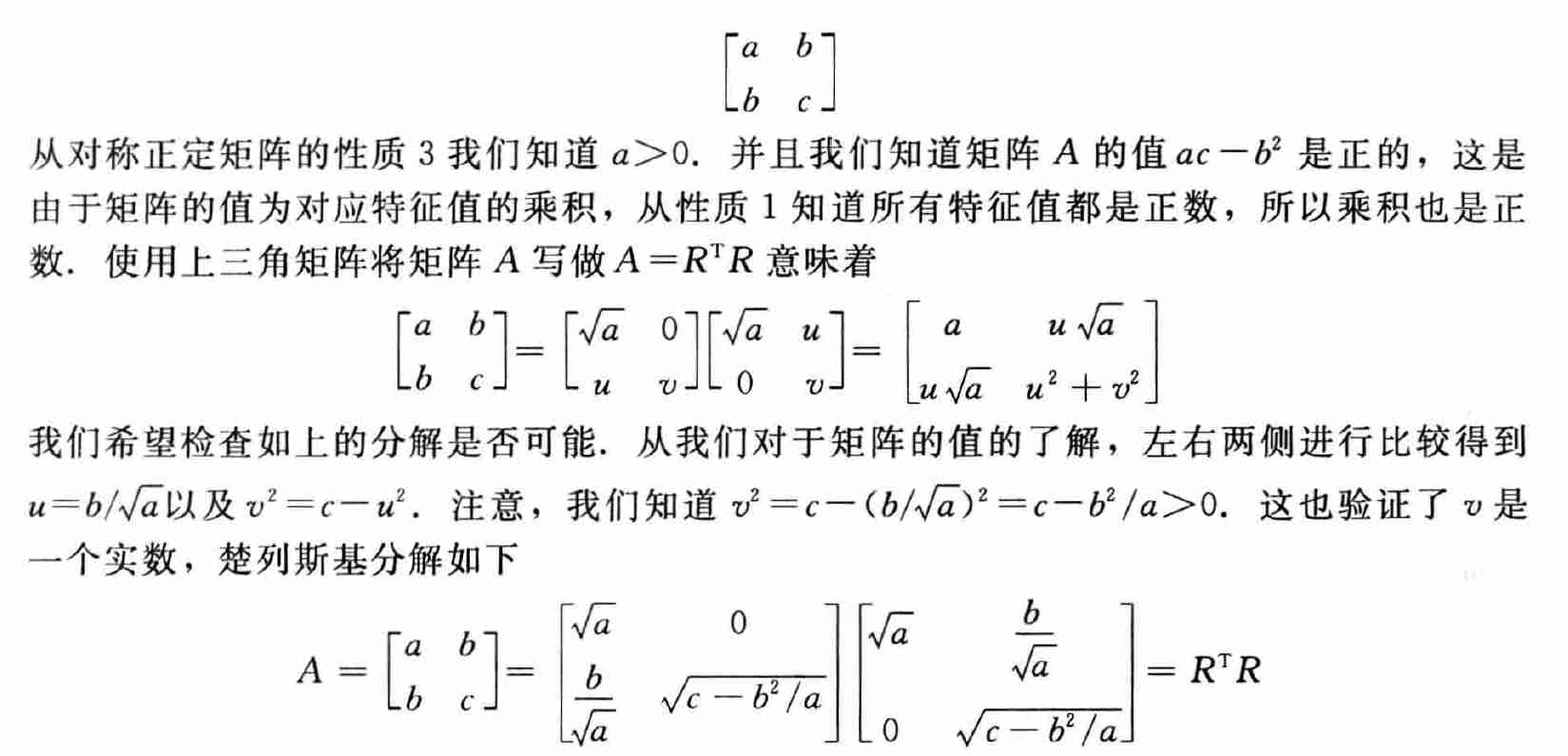
- 如果 \(A\) 是 \(n\times n\) 对称正定矩阵,则存在 \(n\times n\) 上三角阵 \(R\),满足 \(A=R^{T}R\)
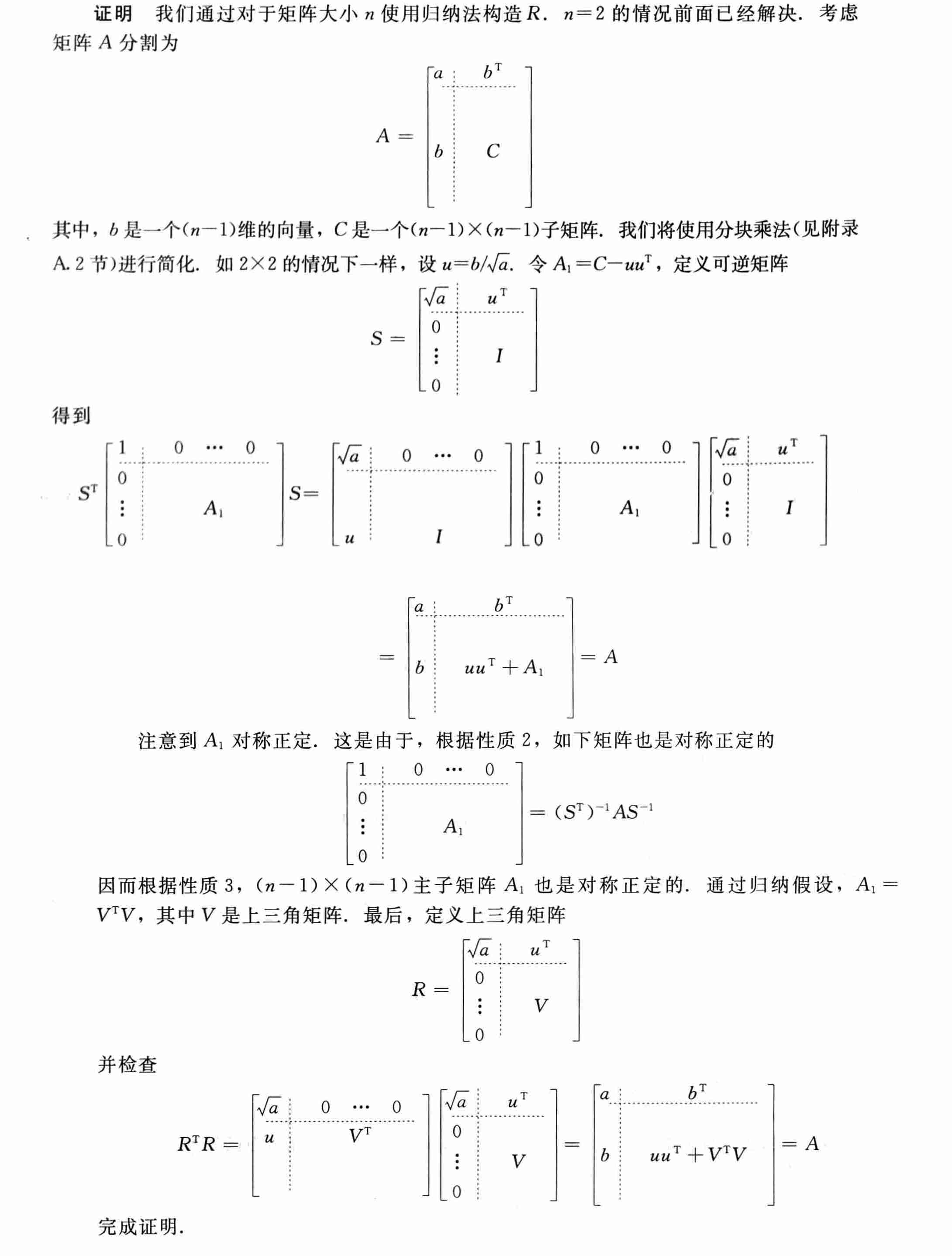
归纳法证明
- \(n=2\) 时
- \(n\ge2\)
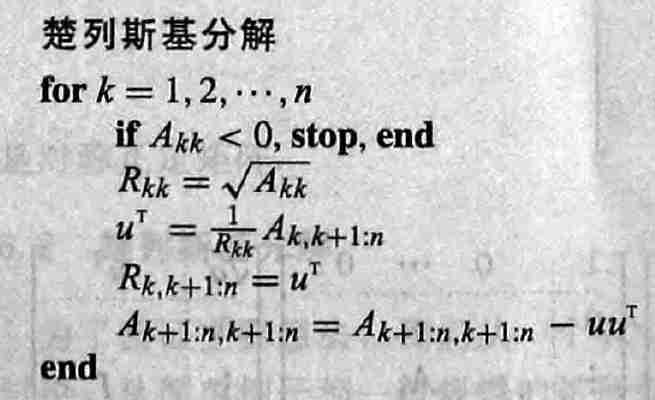
分解算法
- 结果生成的矩阵为上三角矩阵 \(R\)
解方程
- \(Ax=b\)
- \(R^{T}Rx=b\)
- \(R^{T}y=b,Rx=y\)
6.3 共轭梯度方法
- 向量内积是对称的、线性的
\[ (w,v)=(v,w) \]
\[ (\alpha w+\beta v,u)=\alpha(w,u)+\beta(v,u) \]
A 内积与 A 共轭
- 对称正定矩阵 A 的 A 内积和 A 共轭

- A 内积继承了矩阵 A 的线性、对称、正定性质
- A 对称 \(\Rightarrow\) A 内积对称
\[ (v,w)_{A}=\big((v,w)_{A}\big)^{T}=(v^{T}Aw)^{T}=w^{T}A^{T}v=w^{T}Av=(w,v)_{A} \]
共轭梯度方法
- 直接方法,通过有限步得到解
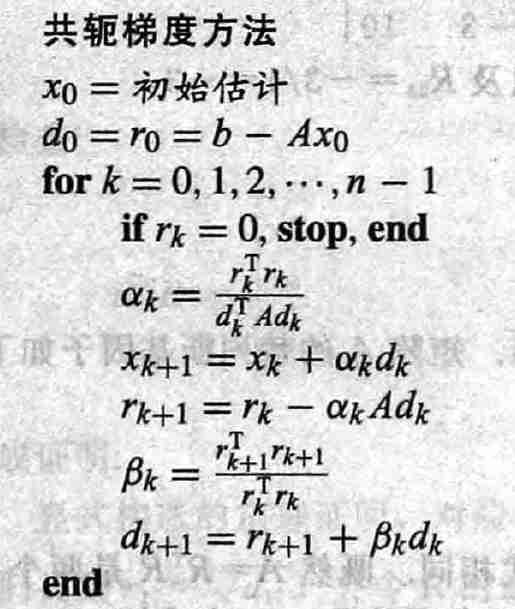
- 每次更新 \(x_k,d_{k},r_{k}\) 这 3
个向量
- \(x_{k}\):近似解
- \(r_{k}\):近似解 \(x_k\) 的余项
- \(d_k\):搜索方向
- \(\alpha_k,\beta_k\):实数,临时变量
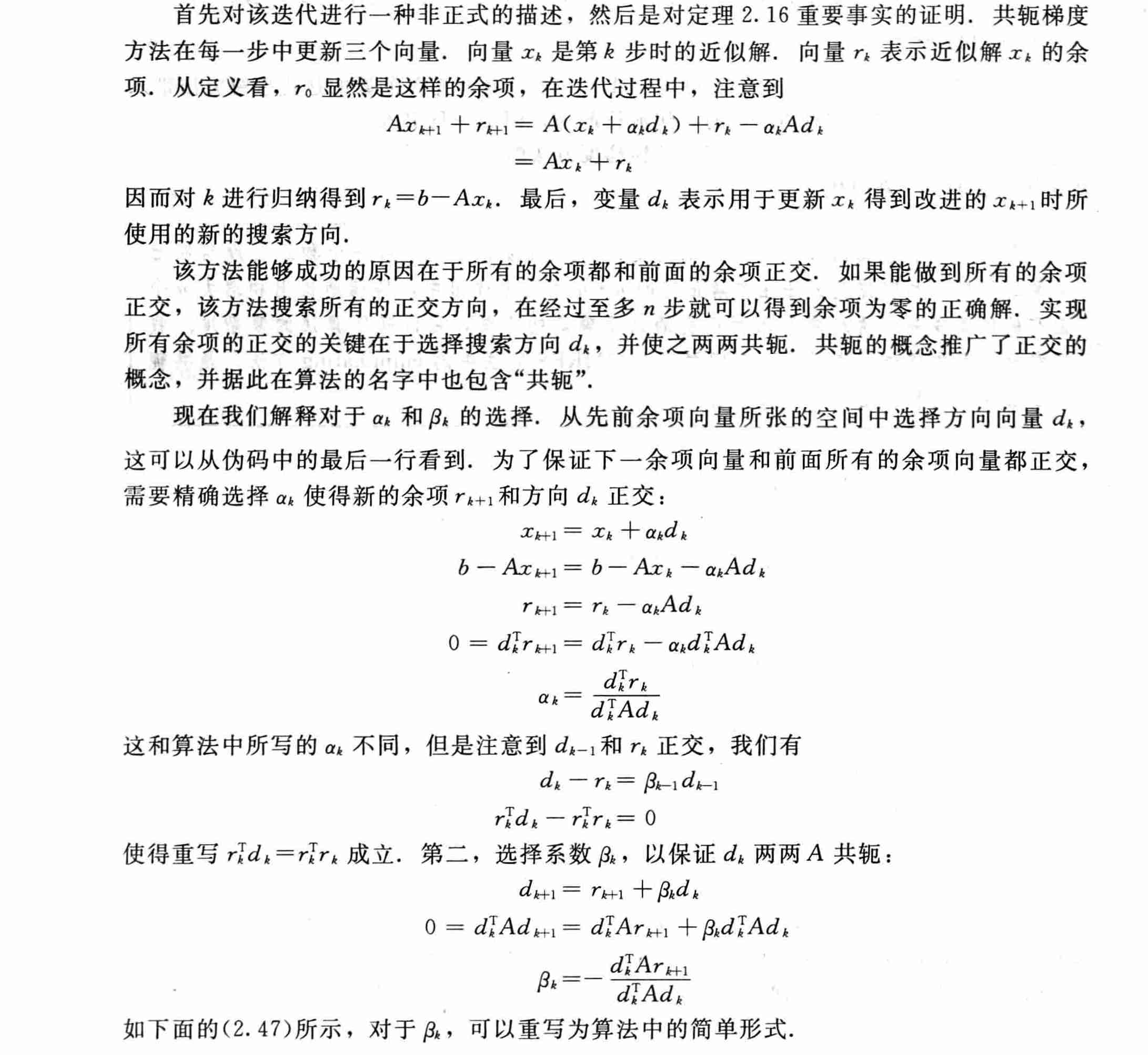
算法解释
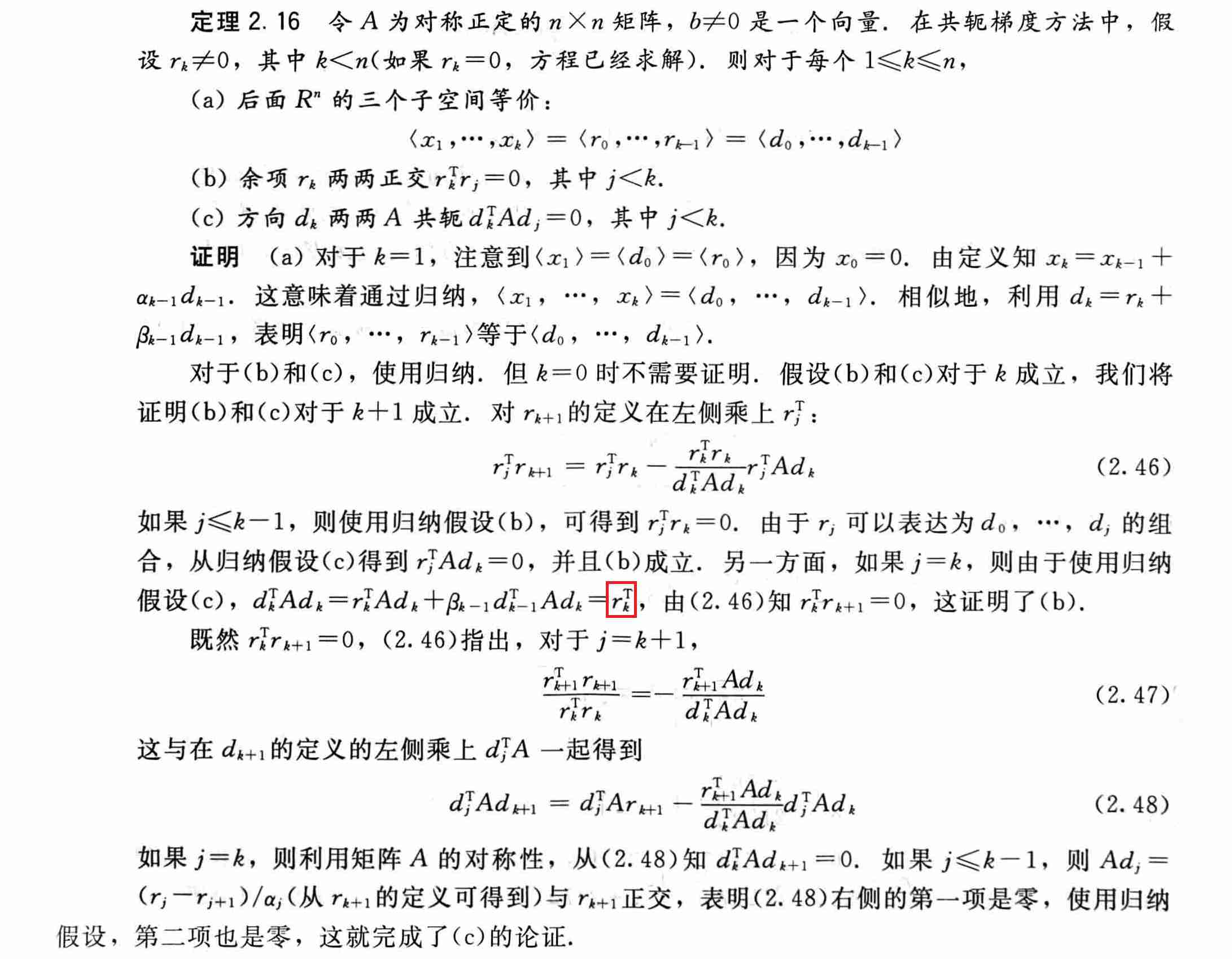
定理与证明
- 注:红框部分应该是 \(r_{k}^{T}Ad_{k}\)
对比
- 共轭梯度方法计算代价大致在 \(n^3\),比高斯消去大
- 共轭梯度方法代码实现上比高斯消去更简单,没有一些边界需要处理
- 对于病态矩阵,共轭梯度方法比部分主元的高斯消去效果更差,可以通过预条件处理进行缓解
- 后向误差和余项的欧几里得长度,随着每一步下降,因而至少对于这种度量方式,\(Ax_i\) 在每一步变得和 \(b\) 越来越接近。因而通过检测 \(r_i\),可能得到一个足够好的 \(x\),并不必做完 \(n\) 步,在这种情况下,共轭梯度方法和迭代方法没有区别。
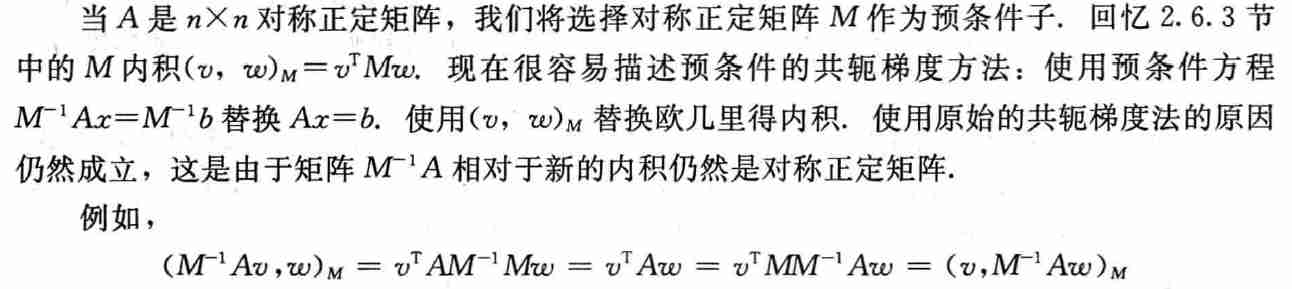
6.4 预条件
- 思想:降低问题中的条件数
- \(Ax=b\) 的预条件形式 \(M^{-1}Ax=M^{-1}b\)
- 矩阵 \(M\) 应该满足如下条件
- 足够接近 \(A\)
- 求逆足够简单
- 这俩条件常常矛盾
- \(M=A\) 时,方程变为 \(x=A^{-1}b\),条件数为 1,但是 \(A\) 不容易求逆
- \(M=I\) 是,方程变为 \(Ax=b\),不能降低条件数
雅可比预条件子
- \(D\) 是 \(A\) 的对角线矩阵
- \(D\) 的逆矩阵也是对角线矩阵,刚好为 \(D\) 中对应元素的倒数
- 在严格对角占优矩阵 \(A\) 中,\(D\) 与 \(A\) 相似且容易求逆
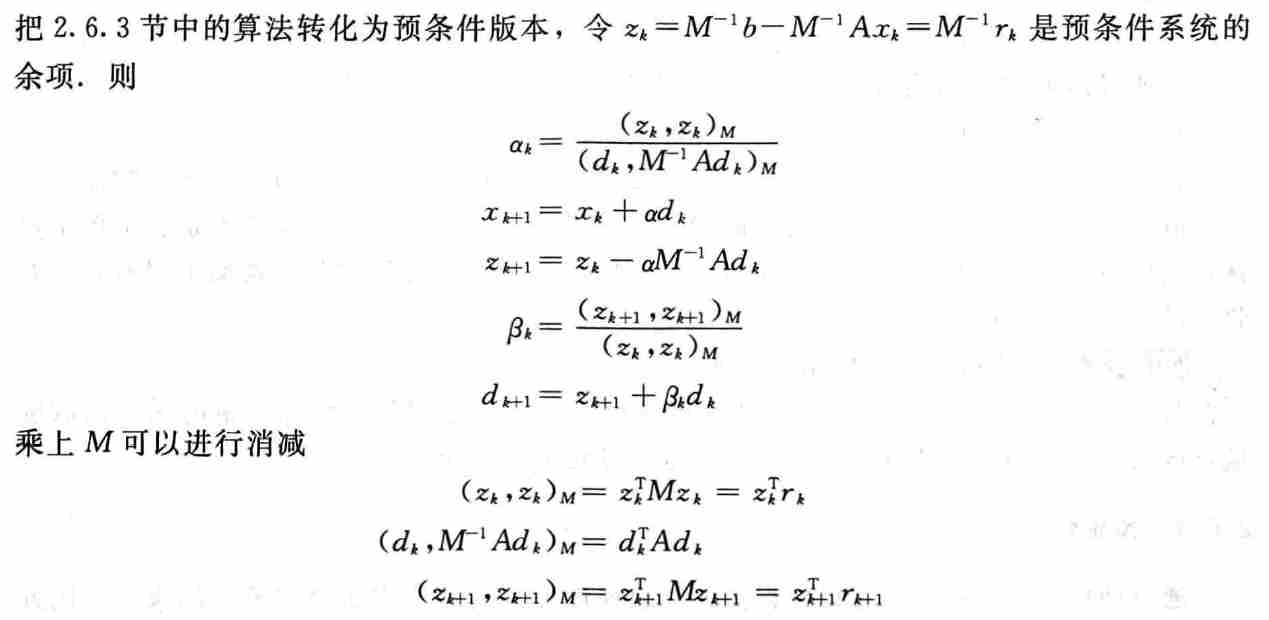
预条件子的共轭梯度算法
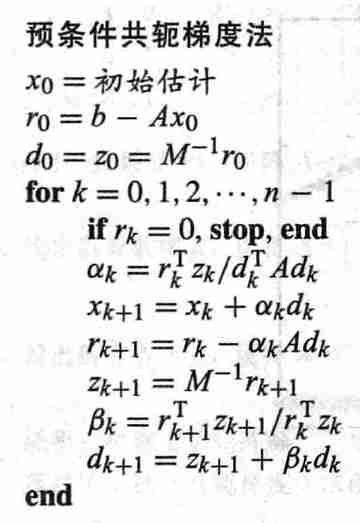
说明
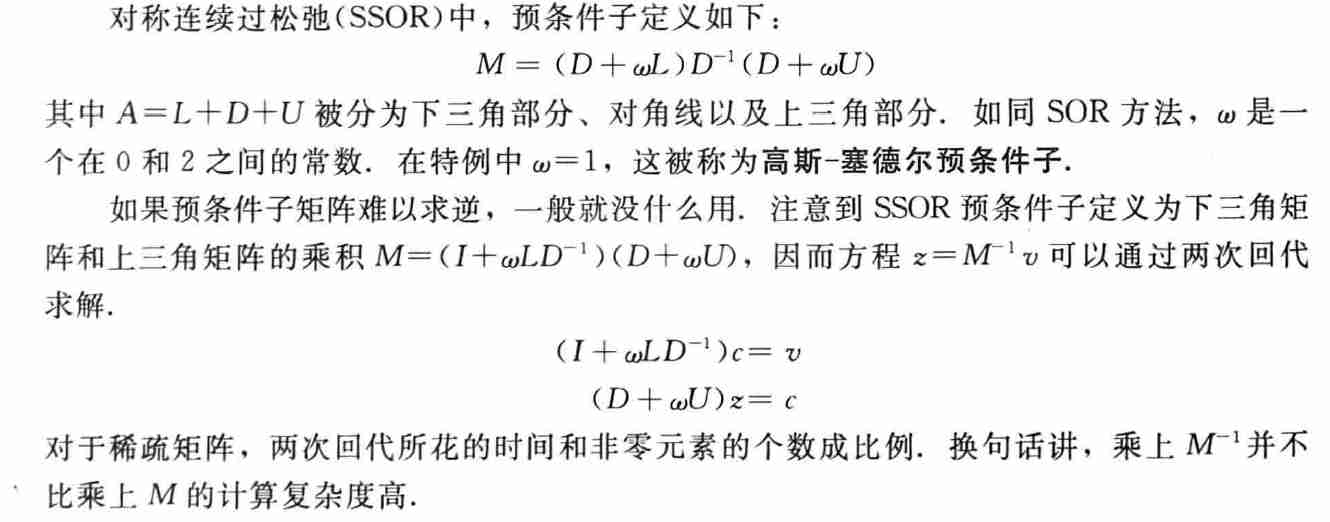
高斯-塞德尔预条件子
\[ \begin{aligned} \begin{array}{c} ... \end{array} \end{aligned} \]
7. 非线性方程组
7.1 多元牛顿方法
- 多元非线性方程组
\[ \left\{ \begin{array}{l} f_{1}(u,v,w)=0\\ f_{2}(u,v,w)=0\\ f_{3}(u,v,w)=0\\ \end{array} \right. \]
- 向量值函数
\[ F(x)=(f_1,f_2,f_3) \]
- 多元非线性方程组转化为
\[ F(x)=0,x=(u,v,w) \]
- 雅可比矩阵
\[ DF(x)=\begin{pmatrix} \dfrac{\partial{f_1}}{\partial{u}}&\dfrac{\partial{f_1}}{\partial{v}}&\dfrac{\partial{f_1}}{\partial{w}}\\ \dfrac{\partial{f_2}}{\partial{u}}&\dfrac{\partial{f_2}}{\partial{v}}&\dfrac{\partial{f_2}}{\partial{w}}\\ \dfrac{\partial{f_3}}{\partial{u}}&\dfrac{\partial{f_3}}{\partial{v}}&\dfrac{\partial{f_3}}{\partial{w}}\\ \end{pmatrix} \]
- \(F(x)\) 在 \(x_0\) 附近的泰勒展开
- 每一行对应一个多元函数的泰勒展开
\[ \begin{align} F(x)&=F(x_0)+DF(x_0)(x-x_0)+O(x-x_0)^2\\ &\approx F(x_0)+DF(x_0)(x-x_0)\\ \end{align} \]
- 多变量牛顿方法
\[ 0=F(r)=F(x_0)+DF(x_0)(r-x_0) \]
多变量牛顿方法
\[ \begin{aligned} \begin{array}{l} x_0=初始估计向量\\ x_{k+1}=x_{k}-\big(DF(x_k)\big)^{-1}F(x_k)\\ \end{array} \end{aligned} \]
- 利用高斯消去(\(\dfrac{n^2}{3}\))替代矩阵求逆(\(n^3\))
\[ \begin{array}{c} DF(x_k)s=-F(x_k)\\ x_{k+1}=x_{k}+s\\ \end{array} \]
7.2 Broyden 方法
- 如果雅可比矩阵不好计算怎么办?
- 得同时更新雅可比矩阵
- 看不懂了
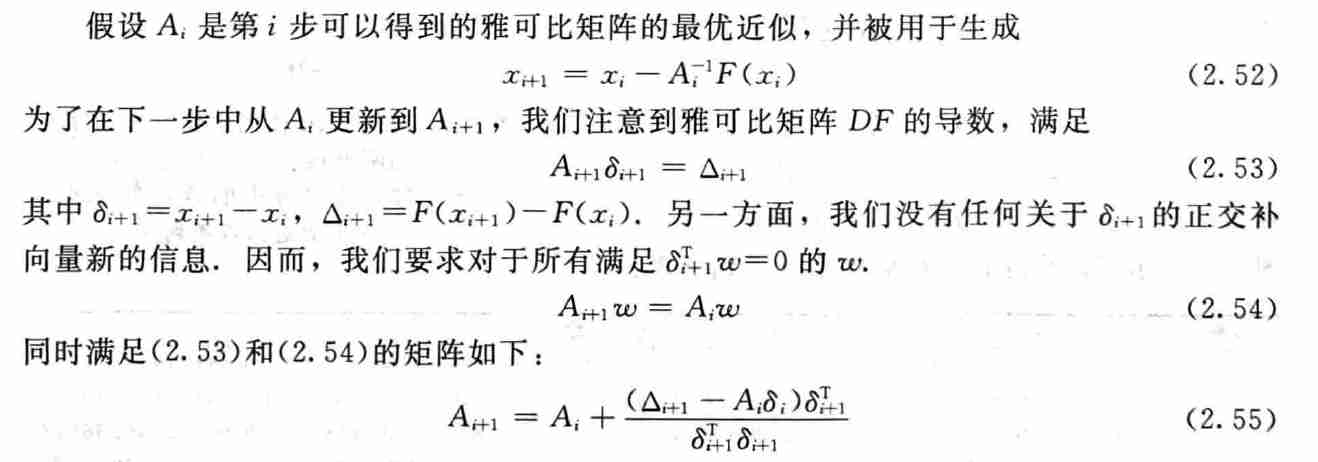
- 如果没有更好的选择,初始的雅可比矩阵可以使用单位阵
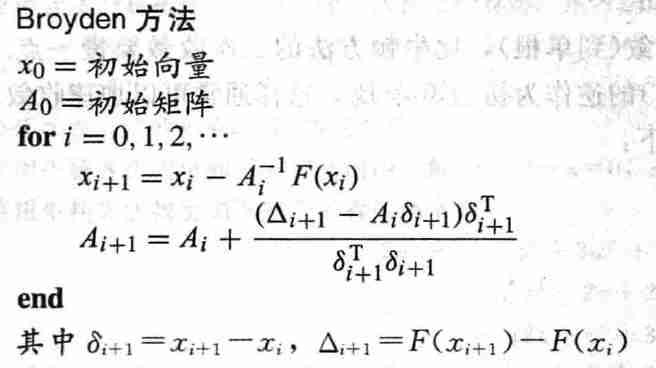
Broyden 算法
Broyden 算法 II
- 避免矩阵求解步骤 \(A_i\delta_{i+1}=-F(x_i)\)
- 直接近似 \(DF\) 的逆,而不是近似 \(DF\)
- 令 \(B_i=A_i^{-1}\)
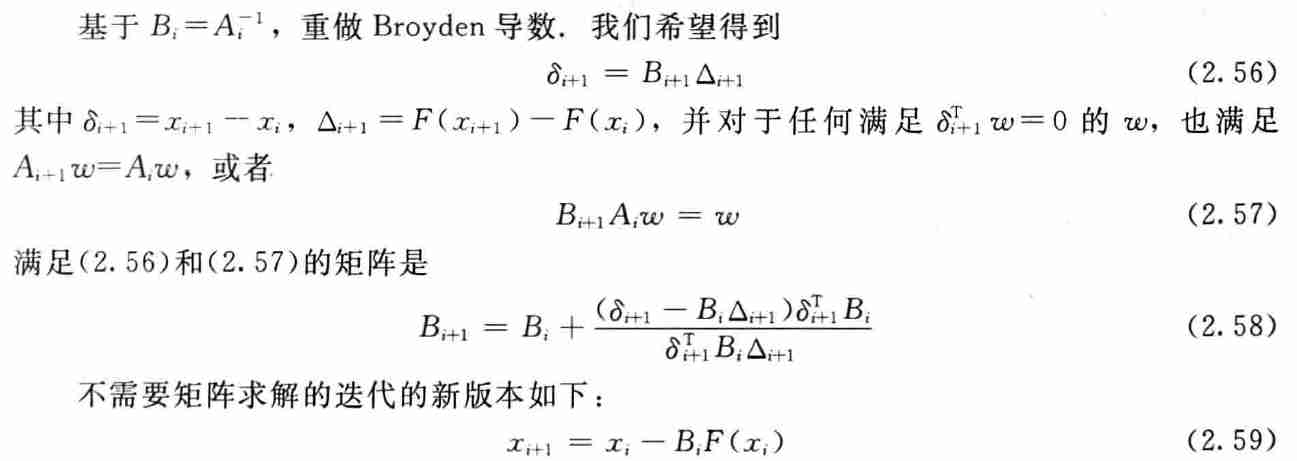
- 算法
