GAMES202.闫令琪.13.实时光线追踪(2)
- https://www.bilibili.com/video/BV1YK4y1T7yY
实时光线追踪
- 空间滤波
- 联合双边滤波
- 大 filter 的实现
- outlier removal(离群值去除)
- RTRT 中的技术
- SVGF:Spatiotemporal Variance-Guided Filtering
- RAE:Recurrent AutoEncoder
空间滤波
实现目标
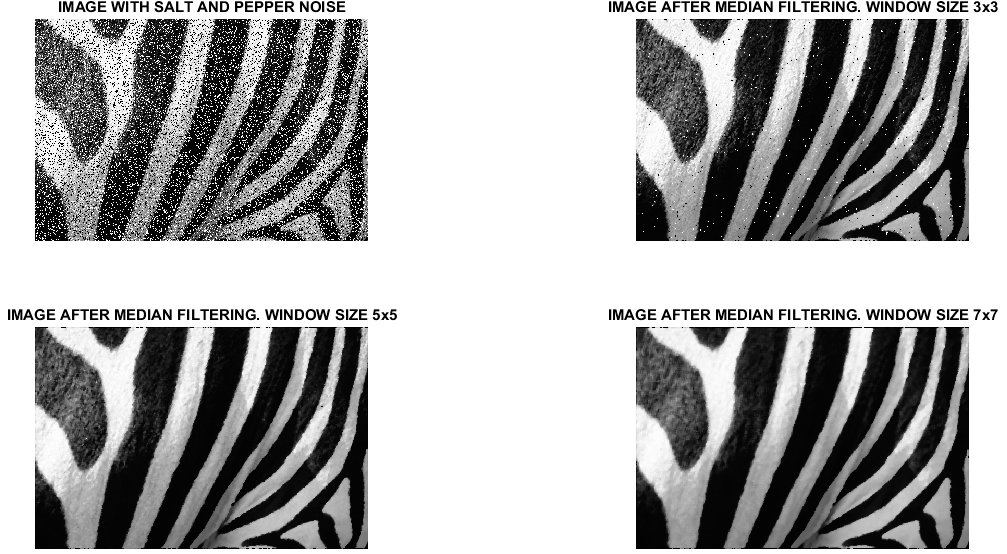
- 实现的效果:降噪
- 下图是椒盐噪声利用中值滤波实现的效果
- 这里我们想做的是低通滤波(low-pass)
- 去除高频噪声
- 高频中也有信号,同时会造成高频信号的丢失
- 还存在一些低频的噪声
- 我们在空间域上进行
- 去除高频噪声
输入
- 一张带有噪声的图片 \(\tilde{C}\)
- 以可滤波核 \(K\)
- 可以每个像素有不一样的滤波核
高斯滤波
- 高斯滤波核
- 周围值得贡献通过离中心点得距离决定
- 由高斯函数决定
- 简单的伪代码实现
- 注意高斯核 \(K\)
的归一化(所有权值和为 1)
- 伪代码中的 sum_of_weights
- 同样的我们之前学到的积分拆解,分母中有一个空积分,这也是为了归一化
- 高斯核本身是无限大的,但是我们可以只考虑比较大贡献的值,例如 \(3\sigma\) 截断
- 在有些算法实现的时候,会先判断一下 sum_of_weights 是否为 0(高斯这里不可能为 0,就不判断了)
- 颜色可以是多通道的,此时 sum_of_weights、sum_of_weighted_values 都是多通道的
- 注意高斯核 \(K\)
的归一化(所有权值和为 1)
1 | For each pixel i: |
双边滤波
- Bilateral Filtering
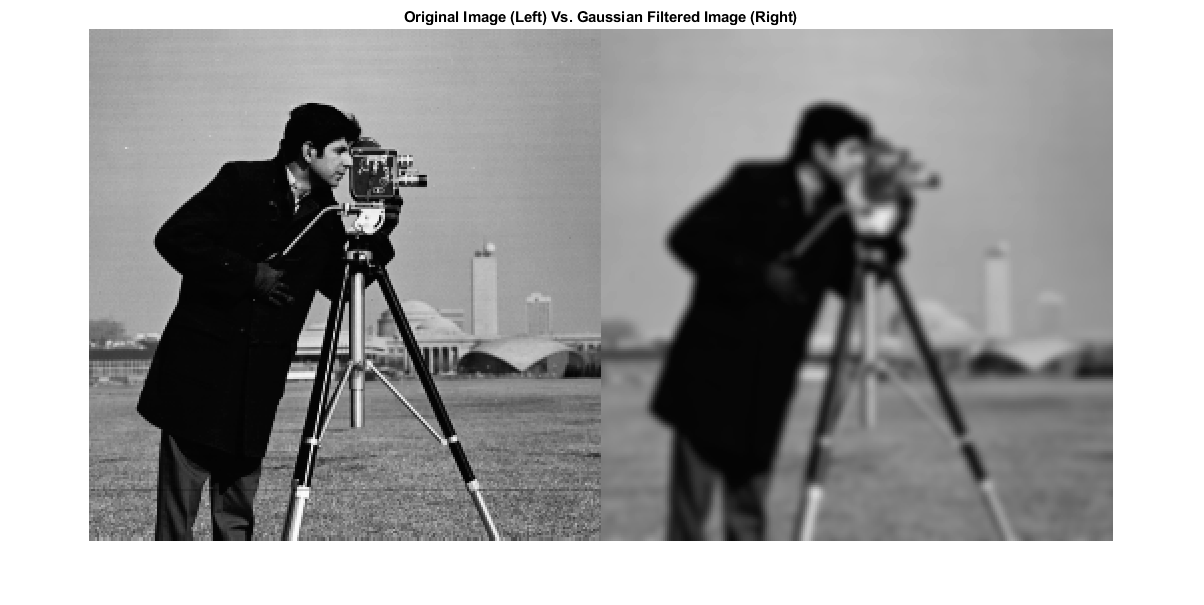
- 高斯滤波的问题
- 图像一些高频细节也同时缺失了,例如边界也被模糊了
- 但是我们想要保留边界的信息
- 下图是一个例子
- 双边滤波的目的就是在去噪的同时能够保持边界
- 基于我们生活中的观察
- 边界:颜色变化非常剧烈
- idea:如何保持边界
- 循环的时候我们看 j 点和 i 点的颜色是不是相差特别大
- 如果相差不是特别大,我们使用原来高斯滤波的方式进行
- 如果相差特别大,我们就减小贡献值(减小权值)
- 循环的时候我们看 j 点和 i 点的颜色是不是相差特别大
- 一种实现如下
- 两个点 \((i,j),(k,l)\)
- 值差别过大的时候,那么贡献就会减小
\[ w(i,j,k,l)=\exp\left(-\dfrac{(i-k)^2+(j-l)^2}{2\sigma_d^2}-\dfrac{\Vert I(i,j)-I(k,l)\Vert^2}{2\sigma_r^2}\right) \]
- 效果如下
- 能够很好的保留边界信息
- 山内部的高频信息被抹掉了,但是边界信息保留了

- 问题
- 噪声很明显的图会出问题
- 分不清噪声和边界
联合双边滤波
- Cross/Joint Bilateral Filtering
- 观察
- 高斯滤波:position distance
- 双边滤波:position distance + color distance
- 于是我们可以用更多的标准,让结果更加接近我们想要的值
- 这就是联合双边滤波
- 联合双边滤波对蒙特卡洛路径追踪算法得到图片的降噪效果很好
- Especially good at denoising path traced rendering results!
- 使用哪些信息呢?
- G-Buffer
- 世界坐标
- 法向
- albedo
- object ID(每种物体标一个数字):motion vector 中使用过
- G-Buffer 本身是完全没有噪声的
- 和多次反射无关
- G-Buffer
- 和之前的滤波一样,不需要考虑归一化
- 在实现的时候对滤波核进行归一化即可,函数不需要归一化
- 也可以使用其他函数,不一定是高斯函数,只要随着距离有衰减就可以
- 高斯函数、指数函数、余弦函数
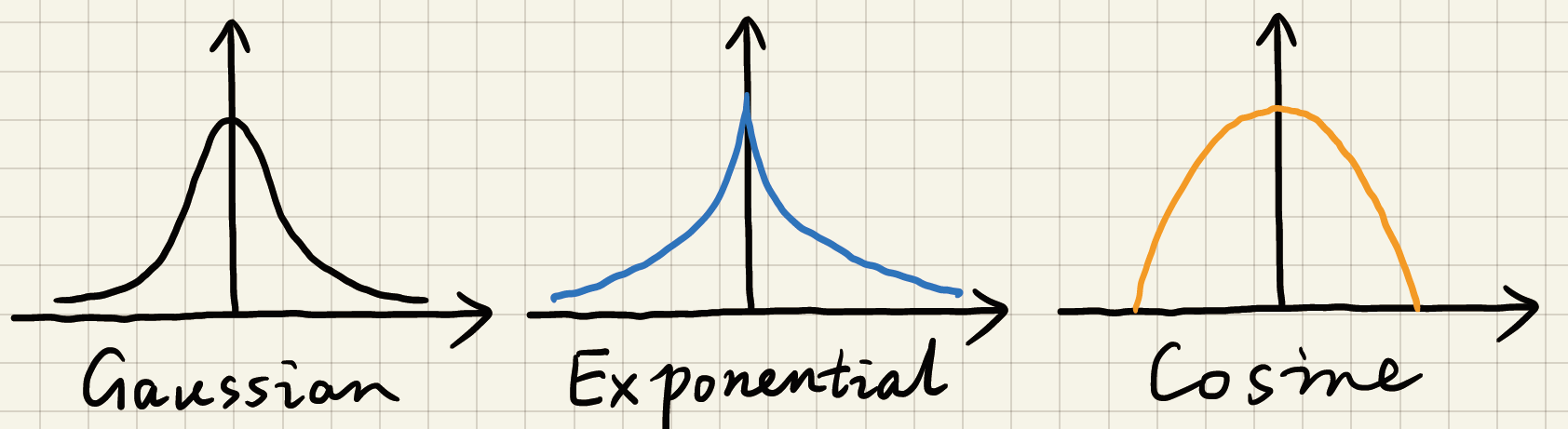
- 高斯也不需要是严格的高斯,系数什么的都可以变
联合双边滤波例子
- 我们渲染得到了如下图片,同时得到了 G-Buffer 如下
- Depth
- Normal
- Color
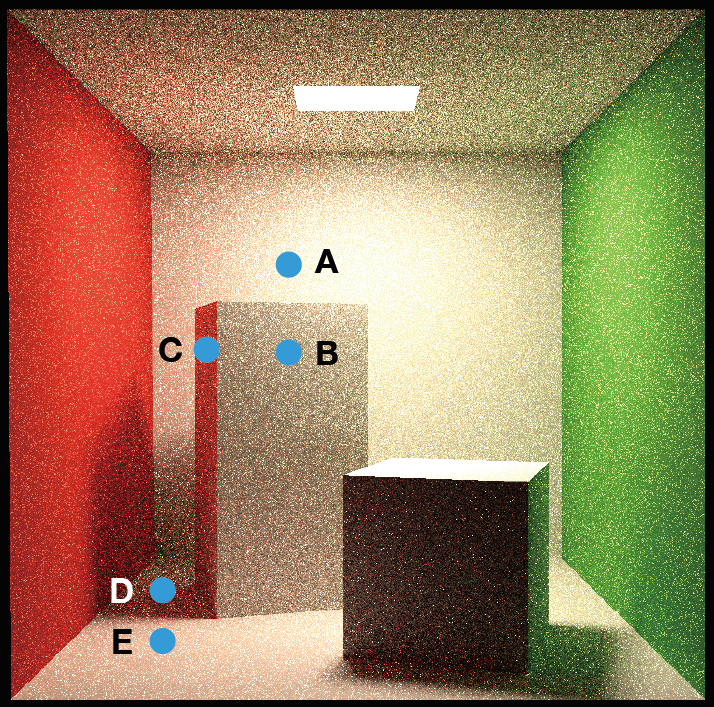
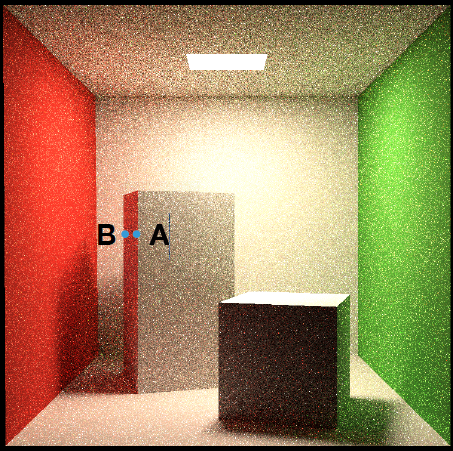
- 如果我们需要保留边界,则可以使用如下信息作为标准(metric)
- A-B:position + depth
- B-C:position + normal
- D-E:position + color
- 有噪声的情况下可能会有些问题,color 可能是噪声
- 具体哪一个标准占的权重大小由 \(\sigma\) 调节
- 比如上面双边滤波中的 \(\sigma_d,\sigma_r\)
实现大的滤波核
- Implementing Large Filters
- 我们在滤波的时候,如果滤波核特别大,计算开销就很大
大滤波核的解决思路
- FFT(快速傅里叶变化)在 GPU 上的优化做的并不好,因此还是基于空间域上的实现
(1) 拆分:Separate Passes
- 例如对一个高斯滤波,我们可以先水平方向做一次,然后在竖直方向做一次
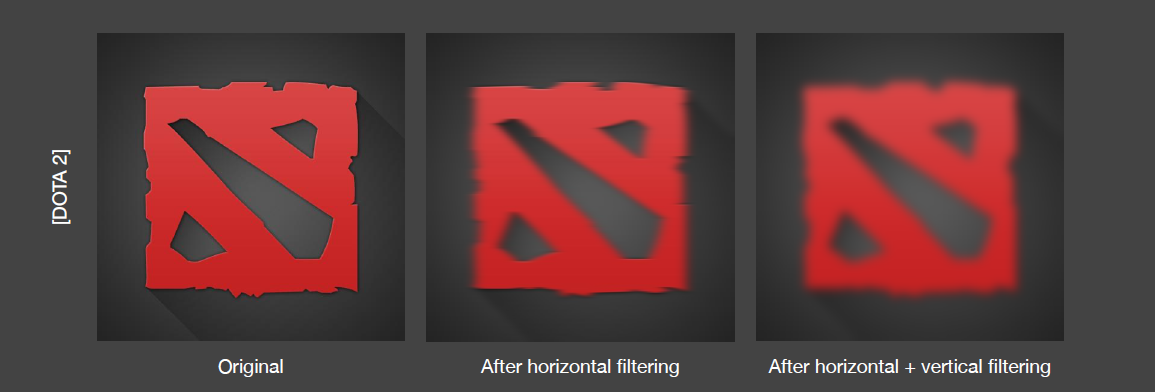
- 对每一个像素,对周围点的查询次数由 \(N^2\) 变成了 \(2N\)
- \(N\) 为滤波核的大小
高斯函数拆分的数学原理
- 高斯滤波为什么能这么拆?数学原理如下
- 高斯函数有好的定义
\[ G_{2D}(x,y)=\exp\left(-\dfrac{x^2+y^2}{2\sigma^2}\right) \]
\[ G_{1D}(x)=\exp\left(-\dfrac{x^2}{2\sigma^2}\right) \]
\[ G_{1D}(y)=\exp\left(-\dfrac{y^2}{2\sigma^2}\right) \]
\[ G_{2D}(x,y)=G_{1D}(x)\cdot G_{1D}(y) \]
- 滤波就是卷积(filtering == convolution)
\[ \begin{aligned} R(x_0,y_0)&=\iint{F(x_0,y_0)G_{2D}(x_0-x,y_0-y)}\;\mathrm{d}x\mathrm{d}y\\ &=\iint{F(x_0,y_0)G_{1D}(x_0-x)G_{1D}(y_0-y)}\;\mathrm{d}x\mathrm{d}y\\ &=\int\Big(F(x_0,y_0)G_{1D}(x_0-x)\;\mathrm{d}x\Big)G_{1D}(y_0-y)\mathrm{d}y \end{aligned} \]
- 双边高斯滤波就不能这么拆分,因为不具备定义上 2D 拆分为 1D 的性质
- 但是在实际工业实现上,都是这么强行拆分的
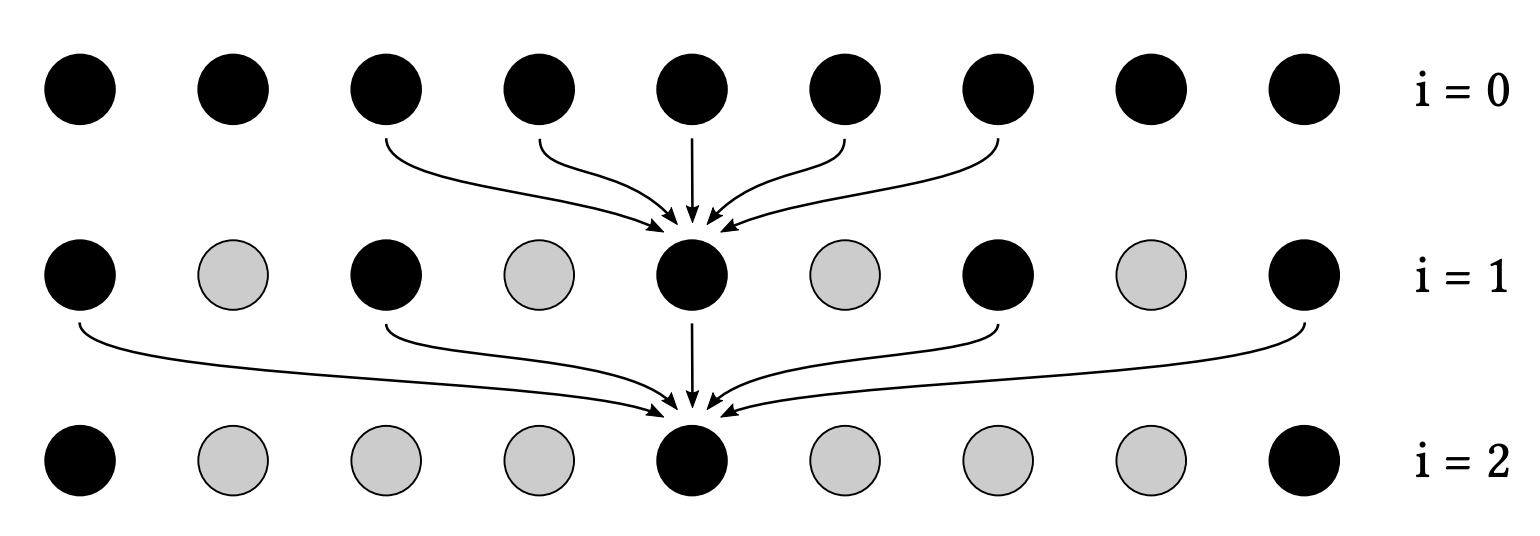
(2) 逐步增大滤波核:Progressively Growing Sizes
- 一个例子:a-trous wavelet
- 每一趟都是 \(5\times5\) 的大小,但是每一趟像素间的间隔是不一样的
- 第 \(i\) 趟考虑的点间隔 \(2^{i}\)
- 第 \(1\) 趟(\(i=0\))
- 考虑的点示例如下
- 因此我们对于原始 \(64\times64\)
的滤波,对于每一个像素点访问周围点的次数从 \(64\times64\) 降到了 \(5^2\times5\)
- 第 \(5(i=4)\) 层的时候,间隔为 \(2^4=16\),一共 \(5\) 个点,\(4\) 个间隔,结果占据范围为 \(64\)
- \(4096\Rightarrow125\)
原理
- 为什么要一开始不直接使用大的 filter?
- 使用更大的 filter == 消除更低的频率
- 跳过一些采样点为什么是可行的?
- 更低的频率间隔更大
- 空间采样,频域上频谱的搬移
- 如果采样频率太低(间隔太大),会导致走样
- 采样定理
- 因为频率变低了,因此可以跳过一些采样点
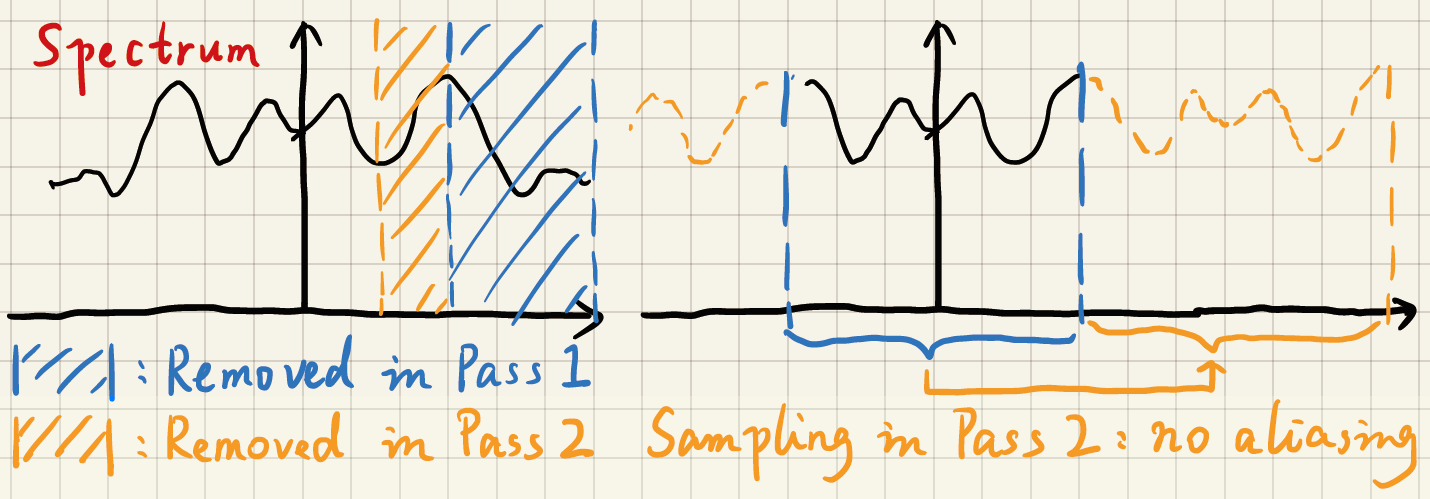
- 根据上图
- 第一个 pass,把蓝色部分的高频信息去掉了
- 第二个 pass 间隔较大,可以去掉黄色部分的高频信息
- 同时不会有走样现象,因为高频信息已经被去掉了
- 可以通过计算得到,频谱搬移的时候恰好不会有混叠
- 在实际中是有问题的,高频信息并不是完全被去掉(非理想滤波器)
- 能看到一些格子状的 artifact
Outlier Removal
- Outlier Removal (and temporal clamping)
- 离群值去除
- 我们在渲染的过程中可能会出现一些特别亮的点,如下图

- 这些点在滤波中很难处理,这个点很亮(值很大),在滤波之后会被扩散为一个光晕(比较大的亮斑)
- the filtered results are still noisy, even blocky
- blocky artifact
- 这些特别亮的点就被称为是 outlier
- 图形学中常被称为是 firefly(火萤)
- outlier removal 会导致能量不守恒
- RTRT 为了提高效率,这么做是可以接受的
过程
- 在做滤波之前先处理掉(不处理掉会影响滤波)
- outlier 检测
- 对于每个像素,查看周围的一个小邻域(\(7\times7\))
- 计算邻域内的均值、方差(也可以用中位数)
- 简单计算
- 用一些数据结构
- 如果一个点的值在均值加减若干个标准差范围内,如果超出这个范围,我们认为他们就是
outlier
- \([\mu-k\sigma,\mu+k\sigma]\)
- 工业界 \(k=1\sim3\) 都有
- outlier removal
- 将 outlier 截断(clamp)
- 工业界 clamp 的实现比较复杂,可能不是一个简单的区间
TAA 中的 outlier removal
- \(\bar{C}^{(i)}=\alpha\bar{C}^{(i)}+(1-\alpha)\bar{C}^{i-1}\)
- 我们对上一帧得到的 noise free 的结果进行截断
- 如果上一帧的结果和这一帧相差太大,我们做一个截断的操作
- 这样的操作是一个 noise 和 lagging 的 tradeoff
- 引入了更多噪声
- 相当于调整 \(\alpha\)
- \(\bar{C}^{(i)}=\alpha\bar{C}^{(i)}+(1-\alpha)\cdot\mathrm{clamp}(\bar{C}^{i-1},\mu-k\sigma,k+k\sigma)\)
SVGF
- Nvidia 2017 年的论文
- Spatiotemporal Variance-Guided Filtering
- 和之前的基本的时空上的降噪方法类似
- 有一些额外的方差分析和 tricks
- 每一个像素会记录一个 variance(方差)
- 1spp / 滤波结果 / ground truth
- ground truth 可以通过 path tracing 用一个较高的 spp 得到的基本收敛的结果

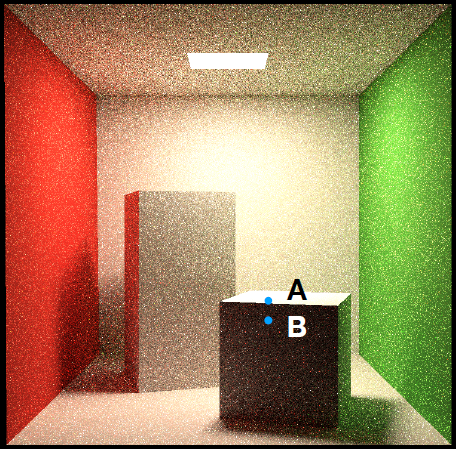
3 个标准
depth
- 深度
- \(q\) 对 \(p\) 的贡献
\[ w_z=\exp\Big(-\dfrac{|z(p)-z(q)|}{\sigma_z|\nabla z_p\cdot(p-q)|+\epsilon}\Big) \]
- 不是高斯,分子是一次方(有衰减即可)
- 分母的 \(\epsilon=10^{-6}\) 防止除零的发生(\(p=q\))
- \(\nabla z\) is the gradient of clip-space depth with respect to screenspace coordinates
- 图上的 A、B 两点在同一个平面上,直观上感觉应该 A 对 B 的贡献不小
- 但是由于这个平面是侧向我们的,深度上有差异,简单的使用深度值的话,计算得到的贡献偏小
- 我们使用深度在法线上差异作为一个标准(切平面上的深度差异)
- 分母计算出来的结果就是按照 \(p\)
点的变化率,深度应该变化的值
- 如果共平面,值和分子相同,计算得到的结果使得贡献值变大
normal
- 法线
\[ w_n=\max\Big(0,n(p)\cdot n(q)\Big)^{\sigma_n} \]
- 指数控制衰减的快慢(之前的 Blinn-Phong 模型的镜面叶)
- 如果场景应用了法线贴图,我们使用的是没有法线贴图之前的法线(marco
normals)
- 法线贴图干扰很大
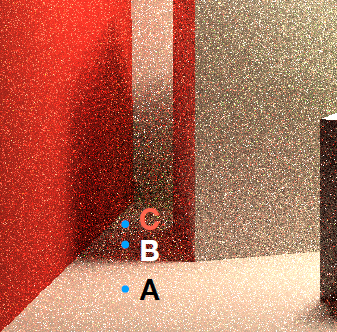
luminance
- luminance(灰度的颜色值)
- 如果两个点的灰度值相差过大,则贡献值要减小
- 例如:A 不应该贡献到 B,B 不应该贡献到 C
- 但是由于噪声的存在,会让我们的判断有些干扰
- 我们通过方差来判断噪声
- 如果方差较大(噪声严重),则不应该过多的相信这两个点之间的差异
- 表达式如下
\[ w_l=\exp\Big(-\dfrac{|l_i(p)-l_i(q)|}{\sigma_l\sqrt{g_{3\times3}\Big(\mathrm{Var}\big(l_i(p)\big)\Big)}+\epsilon}\Big) \]
- 方差具体计算
- spatial:我们对当前帧待判断像素点周围 \(7\times7\) 区域方差值(实际上的标准差)
- temporal:通过 motion vector 找到上一帧中的对应点,求一个方差的平均(带权)
- spatial:在使用的时候,我们在周围取一个 \(3\times3\) 区域内求一个平均值
评价
- 方差项会导致在做 over blur 和 noise 之间的 trade off 的时候,会倾向于 over blur
- 改进:ASVGF
- 更加精准的判断 temporal上的连续情况
- overblur 的不要这么厉害(相对噪声会严重些)
- motion vector 同样会导致拖尾的结果
RAE
- Nvidia 2017 年的论文
- 后处理的神经网络
- 目标:noisy \(\to\) clean
- 使用到一些 G-Buffer 的内容
- 关键结构
- Recurrent block 的结构能够保存上一帧的信息
- AutoEncoder(U-net)结构(漏斗形)
网络结构
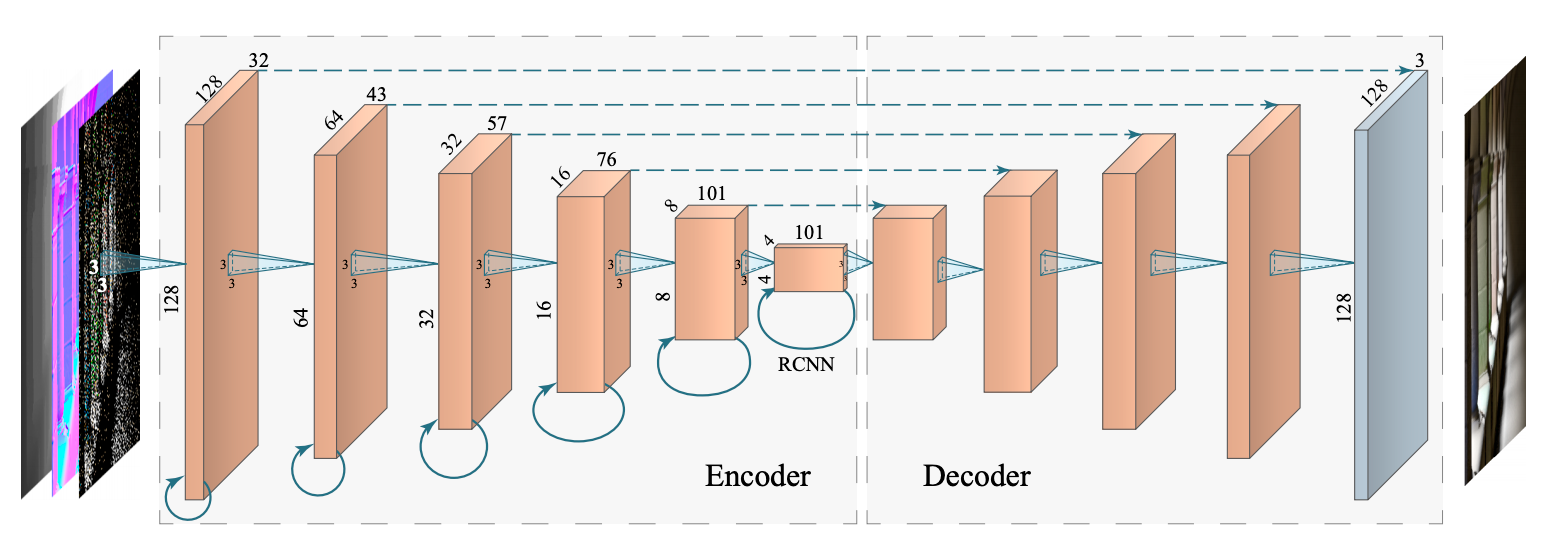
- 输入为 G-Buffer
- AutoEncoder
- 对称的
- skip connection:faster and better training
- Recurrent Block
- 实际跑的时候,保留前几帧的信息
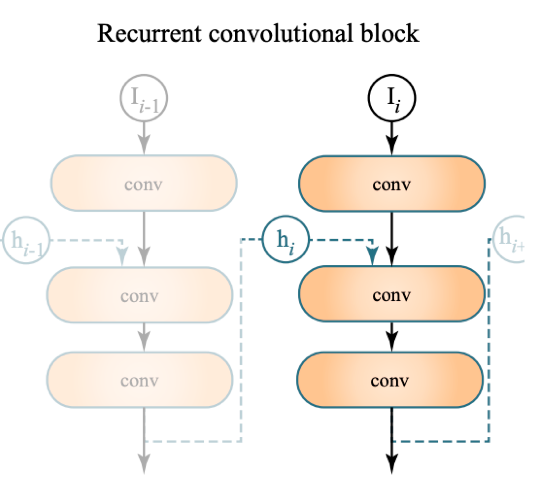
- 训练的时候也需要用一些连续帧(不能只有单张渲染结果)
- 没有使用 motion vector
- 具体使用是什么内容,是神经网络学习出来的结果
- 当时:50ms 一帧
问题
- overblur
- 残影
- RAE 场景偏暗(亮了 artifacts 会增多)
SVGF vs RAE
- 帧间抖动,一些低频噪声,看起来像沸腾的水,boiling artifacts
| Quality | Artifact | Performance | Explanability | Where did the paper go | |
|---|---|---|---|---|---|
| SVGF | Clean | Ghosting | Fast | Yes | HPG |
| RAE (when first invented) |
Overblur | Ghosting | Slow | No | SIGGRAPH |
好处
- RAE 在不同输入情况下, performance 是固定的(网络固定、计算耗时固定)
- Nvidia 把 RAE 中的 Recurrent Block 去掉了,放到了 Optix 的光追降噪中
- 对于稍微高一点的 spp 降噪效果非常好
- 针对单张图片(去掉了 Recurrent Block)
- 在 tensor core 提出之后,RAE 效果变好了