GAMES101.闫令琪.13.动画与模拟(2)(Lecture 22)
- https://www.bilibili.com/video/av90798049
动画与模拟
单个粒子的模拟
- 假设单个粒子在速度场中运动
- 理想,实际很难找到一个速度场
- 解常微分方程
- ODE:Ordinary Differential Equation
\[ \dfrac{dx}{dt}=\dot{x}=v(x,t) \]
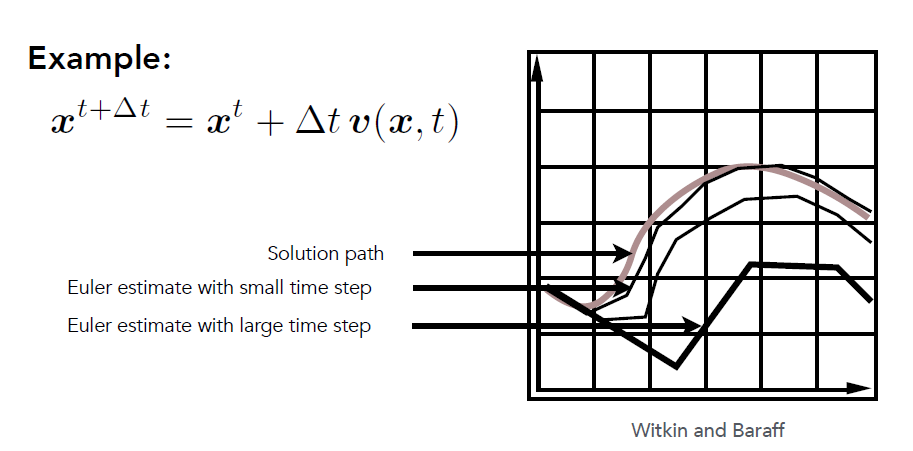
欧拉方法
- 前向欧拉方法,显式欧拉方法
- 简单的迭代方法
- 广泛的使用
\[ \begin{aligned} \boldsymbol{x}^{t+\Delta t}=\boldsymbol{x}^{t}+\Delta t \dot{\boldsymbol{x}}^{t} \\ \dot{\boldsymbol{x}}^{t+\Delta t}=\dot{\boldsymbol{x}}^{t}+\Delta t \ddot{\boldsymbol{x}}^{t} \end{aligned} \]
- 始终用上一个时刻的数据计算这一时刻的数据
存在的问题
不准确
- 很不准确
- 可以通过减小步长来解决
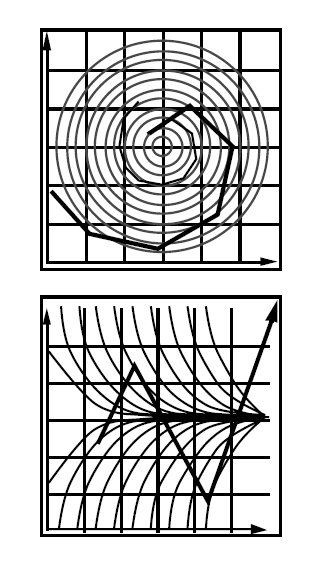
不稳定
- 通常会趋于不稳定
- 例如下面的两个场景
- 场景1:只要有一小段步长,就会脱离螺旋线
- 场景2:不能汇聚到中心,反而离中心越来越远(正反馈)
- 例如下面的两个场景
问题的比较
- Errors
- Errors at each time step accumulate. Accuracy decreases as simulation proceeds
- Accuracy may not be critical in graphics
applications
- CG 中,物理上不太准确没啥大关系,效果好就行
- Instability
- Errors can compound, causing the simulation to
diverge even when the underlying system does not
- 你有一个模拟方法,但是不管你怎么模拟都不会收敛到实际的结果
- 发散的结果和真实的差的特别大
- Lack of stability is a fundamental problem in simulation, and cannot
be ignored
- 不稳定是个很严重的问题
- Errors can compound, causing the simulation to
diverge even when the underlying system does not
对抗不稳定性
中点法
- Midpoint Method
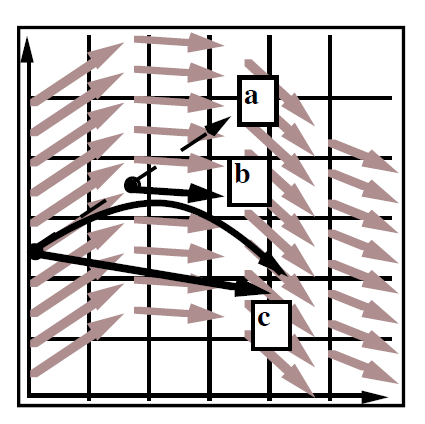
算法
- 首先使用欧拉方法计算出下一个点的位置 a
- 取原始点和 a 点连线的中点 b
- 计算 b 点的方向
- 用 b 点的方向在原始点上移动一段距离
\[ \begin{aligned} x_{mid}=x(t)+\dfrac{\Delta t}{2}\cdot v(x(t),t)\\ x(t+\Delta t)=x(t)+\Delta t\cdot v(x_{mid},t) \end{aligned} \]
评价
- 思想:找一个更具代表性的速度
- 中点法为什么更优?
- 比欧拉方法多了一个二次项
- 展开上述的公式
\[ \begin{aligned} \boldsymbol{x}^{t+\Delta t}&=\boldsymbol{x}^{t}+\Delta t\left(\boldsymbol{\dot{x}}^{t}+\dfrac{\Delta t}{2}\cdot\boldsymbol{\ddot{x}}^{t} \right)\\ &=\boldsymbol{x}^{t}+\Delta t \dot{\boldsymbol{x}}^{t}+\dfrac{(\Delta t)^{2}}{2} \ddot{\boldsymbol{x}}^{t} \end{aligned} \]
- 是欧拉方法的一个改进
自适应步长
- Adaptive Step Size
- 通过估计的方式选择时间步长
- 很实用的方法
- 可能会导致使用很小的步长
算法
- 定义一个阈值 threshold
- 重复以下的步骤,直至误差小于阈值
- Compute \(x_T\) an Euler step, size \(T\)
- Compute \(x_{T/2}\) two Euler
steps, size \(\dfrac{T}{2}\)
- 把时间分成两段,使用两次欧拉方法
- Compute error \(||x_{T}-x_{T/2}||\)
- If (error > threshold) reduce step size and try again
- 重复减半 \(\Delta T\),直至错误小于阈值
隐式欧拉方法
- Implicit methods
- 后向欧拉方法
- 使用下一帧的数据来估计这一个时刻的数据
- 解方程组
\[ \begin{aligned} \boldsymbol{x}^{t+\Delta t}=\boldsymbol{x}^{t}+\Delta t\ \dot{\boldsymbol{x}}^{t+\Delta t} \\ \dot{\boldsymbol{x}}^{t+\Delta t}=\dot{\boldsymbol{x}}^{t}+\Delta t\ \ddot{\boldsymbol{x}}^{t+\Delta t} \end{aligned} \]
- 如果变量描述关系没有这么简单,解方程是一个很难的问题
- 非线性方程组
- 一般情况下会利用优化方法来解
- 牛顿法求根公式
- 结果稳定性非常好
- 怎么定义一个算法的稳定性
- 局部每一步的误差:local truncation error (every step)
- 总的误差:total accumulated error (overall)
- 评价的时候看误差的阶
- 隐式欧拉方法误差的阶是 \(1\)
- 局部误差:\(O(h^2)\)
- 全局误差:\(O(h)\)
- \(h\) 表示步长,在这里是 \(\Delta t\)
- 阶越高越好
- 越高的话,我们可以通过减小步长的方法很快的把误差减小下来
龙格库塔方法
- Runge-Kutta
- 一类方法
- 擅长求解 ODE
- 一个用的比较多的方法:RK4(4阶)
RK4
- 初始化
- 初始状态、场
\[ \dfrac{dy}{dt}=f(t,y),y(t_0)=y_) \]
- 更新方式
\[ y_{n+1}=y_n+\dfrac{1}{6}h(k_1+2k_2+2k_3+k_4) \]
\[ t_{n+1}=t_n+h \]
- 其中
\[ \begin{aligned} k_1&=f(t_n,y_n)\\ k_2&=f(t_n+\dfrac{h}{2},y_n+h\dfrac{k_1}2)\\ k_3&=f(t_n+\dfrac{h}{2},y_n+h\dfrac{k_2}2)\\ k_4&=f(t_n+h,y_n+hk_3)\\ \end{aligned} \]
- 可以理解为中点法的扩展,精确设计
非物理的方法
- Position-Based / Verlet Integration
- 只通过调整位置,使其最后满足某种性质
- 在渲染上很好用
- 不是基于物理的,会不满足物理现象()能量损失极快
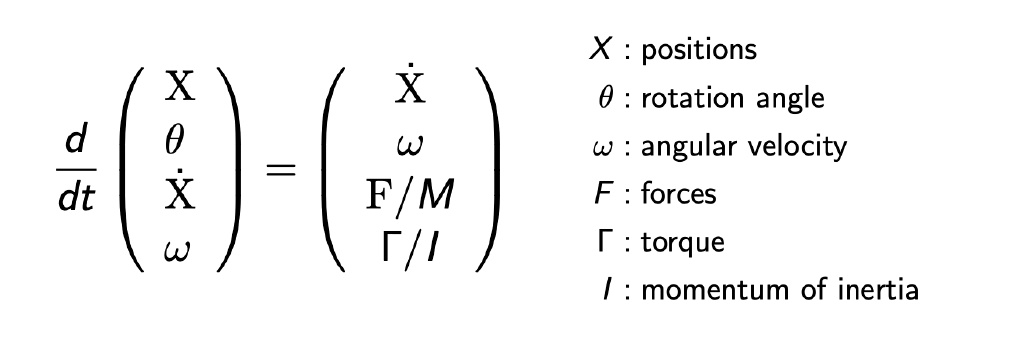
刚体的模拟
- 不会形变
- 类似粒子,但是需要考虑更多的物理量
- 位置、角度、速度、角速度
流体的模拟
- A Simple Position-Based Method
- 通过模拟整个形成水的体积的小球的位置来模拟整个谁的运动
key idea
- 水体是由很多的不可压缩的刚体小球组成的
- 水是不可压缩的(水的密度是一样的)
- 从密度的角度出发,如果某个位置的密度发生了改变(和原来不一样),通过改变小球的运动将密度进行修正
- 模拟水的运动
- 需要知道密度对所有小球位置(粒子)的梯度
- 很远的小球不影响,梯度为 0
- 比较近的小球的会影响
- 怎么更新(调整小球位置)
- 梯度下降方法
- 可能出来停不下来的现象
- 可以人为加上运动损失
两大流派
- Eulerian vs. Lagrangian
- https://www.youtube.com/watch?v=iDIzLkic1pY
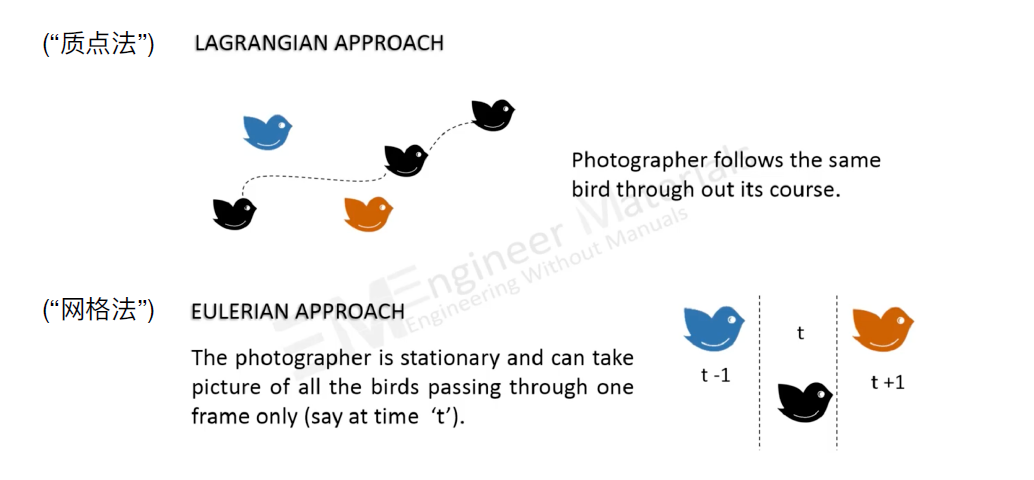
拉格朗日方法
- 质点法
- 跟踪每一个质点的信息
欧拉方法
- 网格法
- 将场景划分为若干网格
- 跟踪每个网格的信息变化
物质点方法
- Material Point Method (MPM)
- 两种方法的混合
思路
- Lagrangian: consider particles carrying material properties
- 每一个点都带有一些属性
- Eulerian: use a grid to do numerical integration
- 属性的计算是以网格为单位的计算
- Interaction: particles transfer properties to the grid, grid
performs update, then interpolate back to particles
- 网格计算完之后把这些信息写回每个点