GAMES101.闫令琪.04.光线追踪(1).Whitted 风格的光线追踪(Lecture 13-14)
- https://www.bilibili.com/video/av90798049
光栅化的问题
- 不好去表示一些全局的效果(Global Effects)
- 软阴影(Soft Shadow)
- 光栅化 VSM
- Glossy Reflection
- Glossy:有高光的效果,但是同时本身具有粗糙性的材质
- 间接光照(Indirect Illumination)
- light bounce more than once
- 光栅化有一些效果可以模拟,但是效果不太好
- 光栅化方法
- 快,但是是一种近似算法
- Real-Time
- 光线追踪方法
- 准确,但是慢
- Offline(离线)
Ray Tracing
光线的 3 个假定
- Light travels in straight lines (though this is wrong)
- 光沿直线传播
- Light rays do not “collide” with each other if they cross (though
this is still wrong)
- 光线发生交互的时候互不干扰
- Light rays travel from the light sources to the eye
- (but the physics is invariant under path reversal - reciprocity).
- 光线(光路)的可逆性
Ray Casting
- Appel 1968 - Ray casting
- Generate an image by casting one ray per pixel
- 对每个像素,从视点向像素发出一条光线(reciprocity)
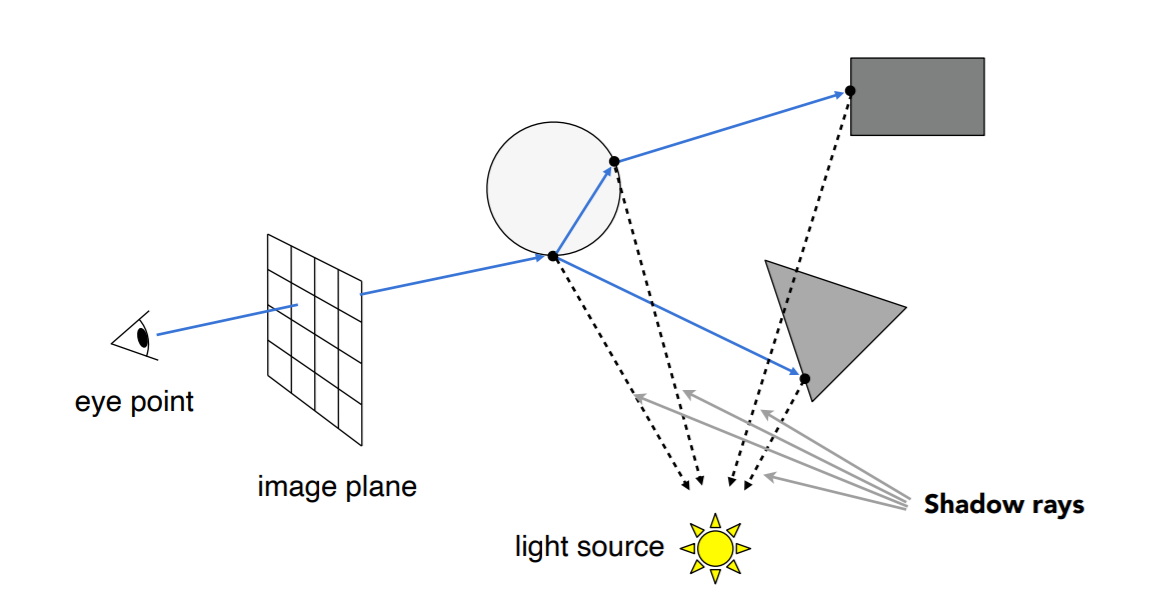
- Check for shadows by sending a ray to the light
- 对于找到的点,判断其是否处在阴影中(对光源可见)
- Generate an image by casting one ray per pixel
- 其他的假设
- 视点就是一个点
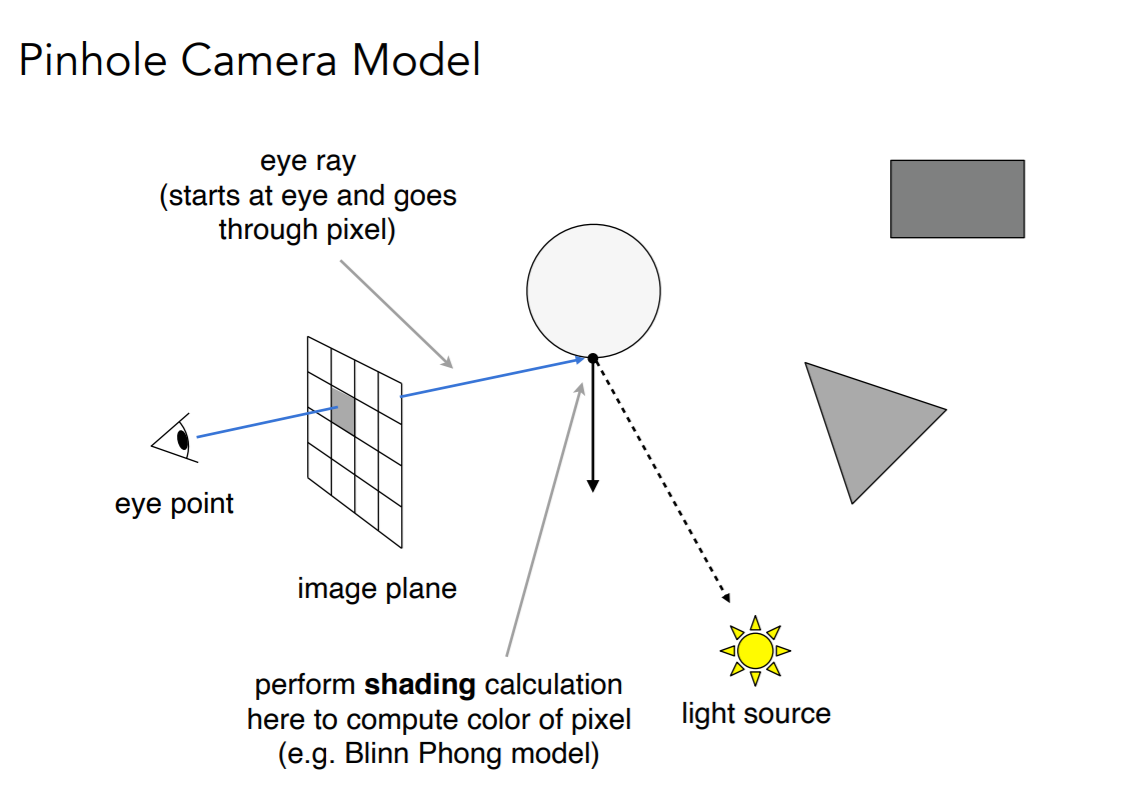
- 投射光线
- eye ray:从眼睛射向像素的光线
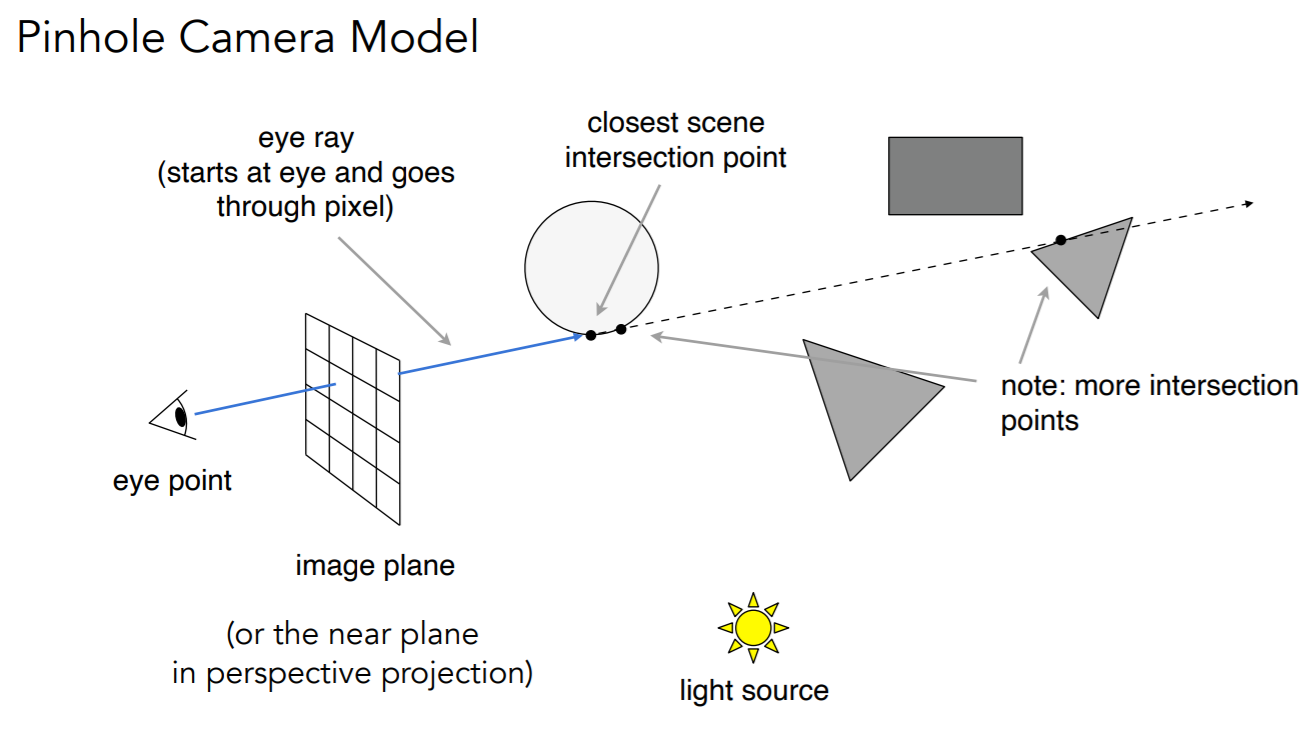
- 判断是否可见,若可见利用之前的模型进行计算光照
Recursive (Whitted-Style) Ray Tracing
- 考虑第一次接触点的折射、反射
- 递归计算
- shadow rays(判断是否对光源可见)
- 着色计算:对每一个接触点进行计算
- 多条光路的叠加
- 需要考虑能量损失
- eye ray 又被称为 primary ray
- secondary ray:经过一次折射/反射之后的线
光线求交
- Ray-Surface Intersection
- 光线的定义
- 光线的起点 \(\mathbf{o}\)
- 光线的方向 \(\mathbf{d}\)
- 单位向量
- 光线的方程
- Ray Equation
- \(\mathbf{r}(t)=\mathbf{o}+t\mathbf{d},0\le t\le \infty\)
光线与球体求交
- Sphere
- \(\mathbf{p}:(\mathbf{p}-\mathbf{c})^2-R^2=0\)
- 联立方程组求解即可
- 解的个数:\(0,1,2\)
- 不相交,相切,两个交点(取小的)
一般的曲面
\[ \left\{ \begin{array}{**lr**} \mathbf{r}(t)=\mathbf{o}+t\mathbf{d},0\le t\le \infty\\ f(\mathbf{p})=0 \end{array} \right. \]
显式表面求交
- 和三角形求交
- 可以用于判断点是否在物体内部
- 内部的点,引一条射线,和物体的交点必为奇数个
- 外部的点,引一条射线,和物体的交点必为偶数个
- 很慢,每个三角都需要求交
光线和三角形求交方法
- 光线和三角形所在的平面求交
- 判断这个交点是否在三角形内部
- 平面的定义
- 法线 \(\mathbf{N}\)
- 平面上任意一个点 \(\mathbf{p'}\)
- 平面上的一个点 \(\mathbf{p}:(\mathbf{p'}-\mathbf{p})\cdot\mathbf{N}=0\)
- 展开后和平面方程相同 \(ax+by+cz+d=0\)
- 联立方程组求解
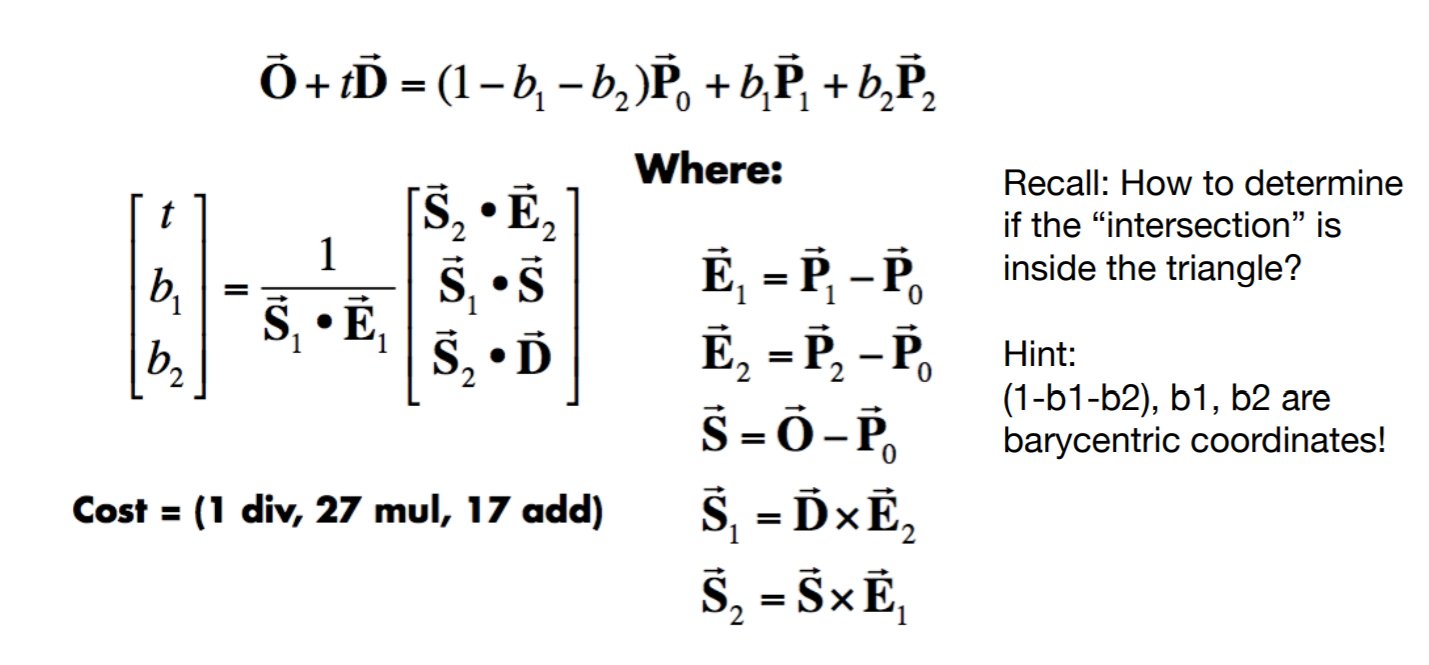
Moller Trumbore Algorithm
- 怎么直接把结果解出来用于判断
- 重心坐标
\[ \mathbf{r}(t)=\mathbf{o}+t\mathbf{d}=(1-b_1-b_2)\mathbf{P_0}+b_1\mathbf{P_1}+b_2\mathbf{P2} \]
\[ \begin{aligned} &0\le t\le \infty\\ &0\le b_1\le1\\ &0\le b_2\le1\\ &0\le 1-b_1-b_2\le1\\ \end{aligned} \]
- 3 个未知量,3 个方程(3维)
- 解的显式表达
加速求交
- Accelerating Ray-Surface Intersection
- 如果不加速,算法复杂度
- pixels x triangles x bounces
Bounding Volumn
- 包围盒:包围整个模型
- 先对包围盒求交,如果无交点,则不需要对模型求交
- 简单的包围盒:长方体
- 三个对面
- box is the intersection of 3 pairs of slabs
AABB
- Axis-Aligned Bounding Box
- 轴对齐包围盒
- 计算快
- 如何计算 (2D 的例子)
- 每个对面求交
- \(t_{enter}=\max\{t_{min}\},t_{exit}=\min\{t_{max}\}\)
- 思想
- The ray enters the box only when it enters all pairs of slabs
- 三个对面都进入,才是进入
- The ray exits the box as long as it exits any pair of slabs
- 离开一个对面,即离开
- The ray enters the box only when it enters all pairs of slabs
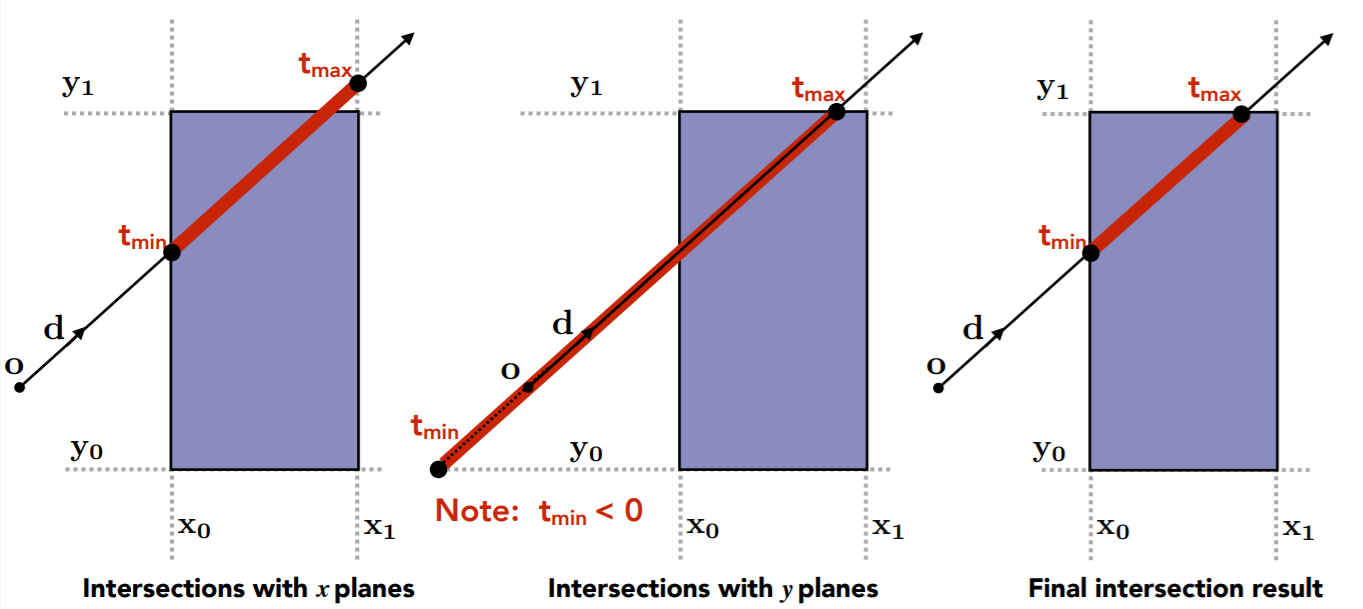
- 如果不相交:\(t_{exit}\le t_{enter}\)
- 光线是射线,考虑 \(t\) 的正负
- \(t_{exit}<0\):无交点(物体在光线背后)
- \(t_{enter}<0,t_{exit}\ge0\):光源在物体里面
GTC 一些新闻
- GTC news: DLSS 2.0
- https://zhuanlan.zhihu.com/p/116211994
- GTC news: RTXGI
- https://developer.nvidia.com/rtxgi
基于 AABB 的光线求交加速结构
- 光线与 AABB 求交
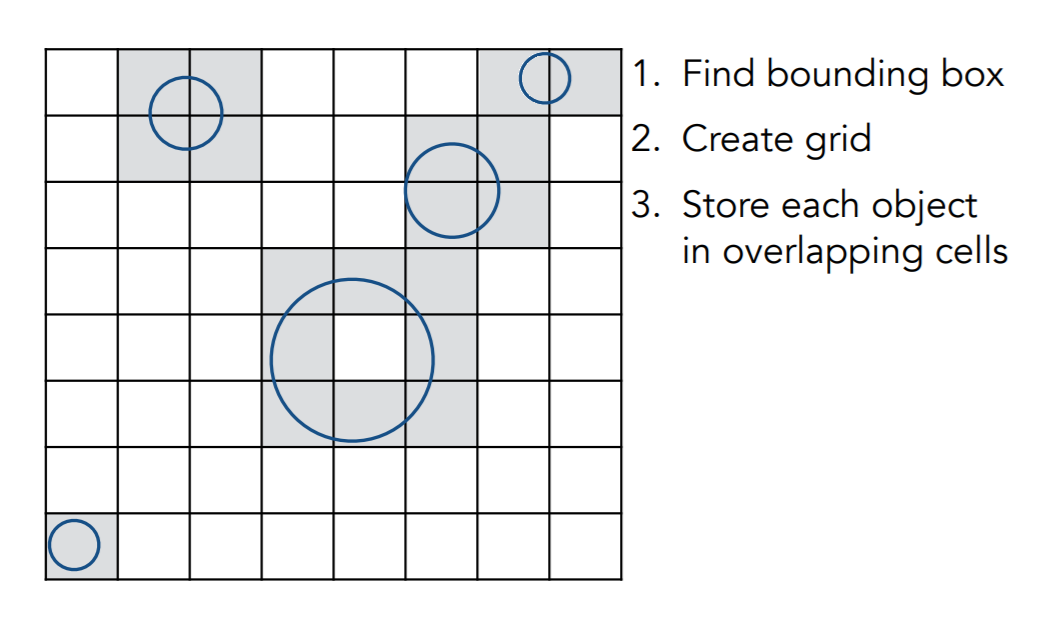
均匀的格子
- Uniform Spatial Partitions (Grids)
- 场景预处理
- 网格化
- 算法步骤
- 光线与沿途每个盒子求交
- 若盒子里面含有物体,则于保存的物体部分求交
- 没有物体,则光线前进(找下一个盒子)
- 基于想法如下
- 光线和盒子求交比光线与物体求交快
- 光线与盒子求交
- 怎么找光线下一次相交的盒子
- 最朴素的想法:周围两个都算一遍(向前 2 个测试,向后的 2 个不用管)
- 高级算法:类似于光栅化一条线的算法
- 怎么找光线下一次相交的盒子
加速程度
- 网格:1 x 1(无加速效果)
- 网格过于密集:与盒子求交的成本变大
- 经验性划分
- #cells = C x #objs
- C = 3 x 3 x 3
- 适合场景
- 物体多,在场景中分布均匀
- 不适合场景
- 场景较空,分布不均匀
- 大规模空白,和物体相交前需要经过大量空白
- "Teapot in a stadium" problem
- 场景较空,分布不均匀
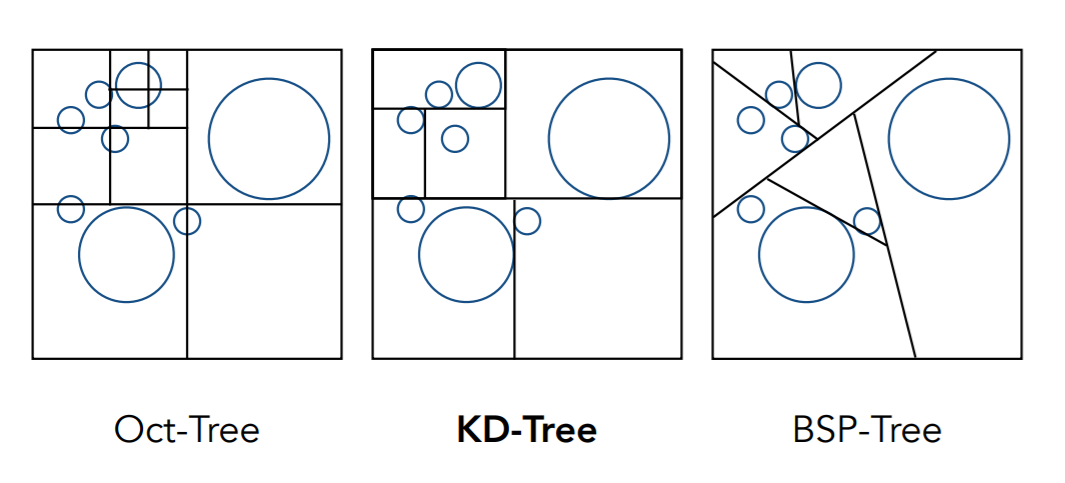
空间划分
- Spatial Partitions
- 划分方法
- 八叉树
- 维度相关(\(2^n\) 叉树)
- KD 树
- 每次只沿着一个轴展开(二叉树)
- 横竖交划分(相对均匀)
- BSP 树
- 空间二分
- 每次选择一个方向做划分
- 不是横平竖直的
- 维度高了就不好计算
- 八叉树
KD-Tree
- 在光线跟踪之前先建立 KD 树
- 数据结构
- 内部结点
- 记录划分方向(x,y,z)
- 记录划分位置(不一定是正中间)
- 子结点(指向子节点的指针)
- 不需要存储物体信息
- 外部结点(叶结点)
- 存储物体列表
- 内部结点
- 光线遍历
- 先判断和 A 是否有交点
- 有交点,接着和 A 的两个子结点判断是否有交点
- 1 有交点,但是是叶子结点了,计算光照
- 其实 1 还需要继续划分
- 内部还有多个物体,可能规则上认为可以停止
- 但是这里已经当作叶子结点了,就不划分了
- 其实 1 还需要继续划分
- B 有交点,重复上述步骤,进入 B
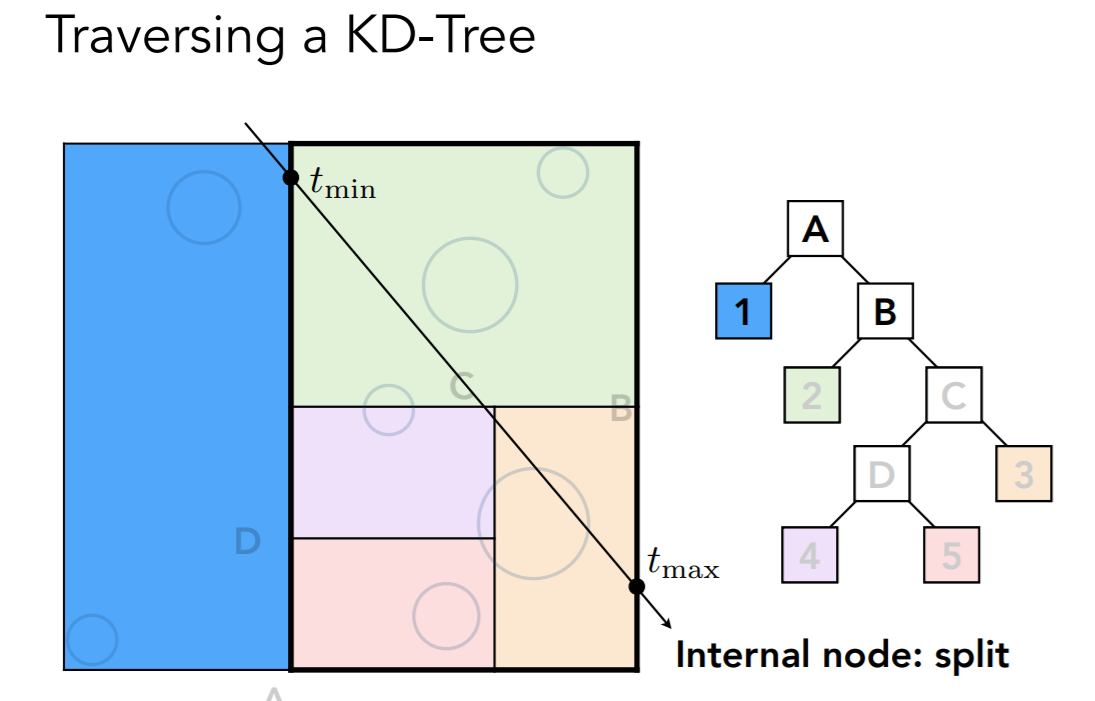
- 无交点的块不需要计算光照了
存在的问题
- KD-Tree 的建立不简单
- 难以判断一个三角形和某个包围盒有交集
- 3 个顶点都在包围盒外也可能有交点
- 包围盒穿透三角形
- 截面整个在三角形内部
- 3 个顶点都在包围盒外也可能有交点
- 一个在边界的物体可能属于多个包围盒
- 多个叶子节点里面都需要计算光照
- 现在很少用这种方法了
BVH
- Bounding Volumn Hierarchy
- 基于物体的划分
- Object Partition
- 现在常用的方法
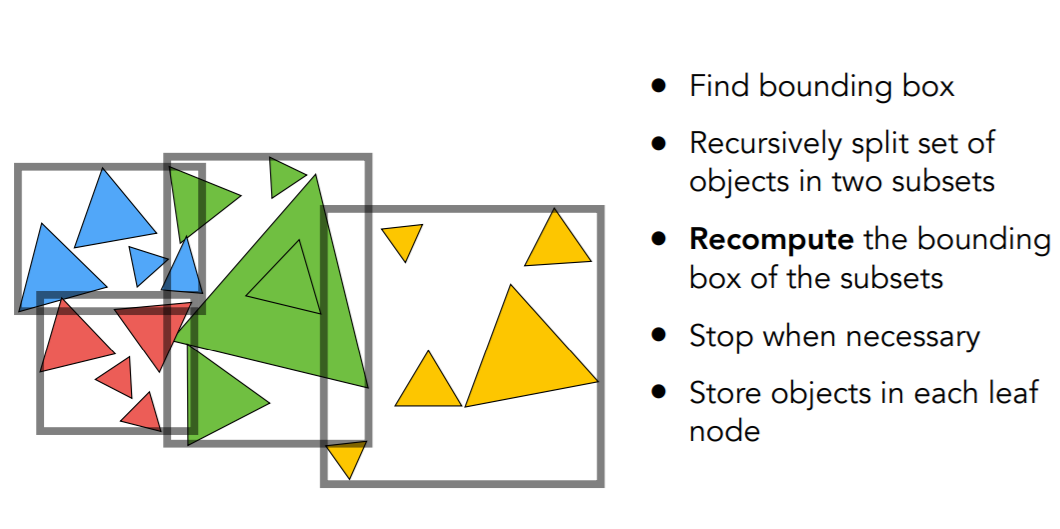
- 算法
- 把当前包围盒内的三角形做一个划分
- 然后把划分得到的两个部分分别求包围盒
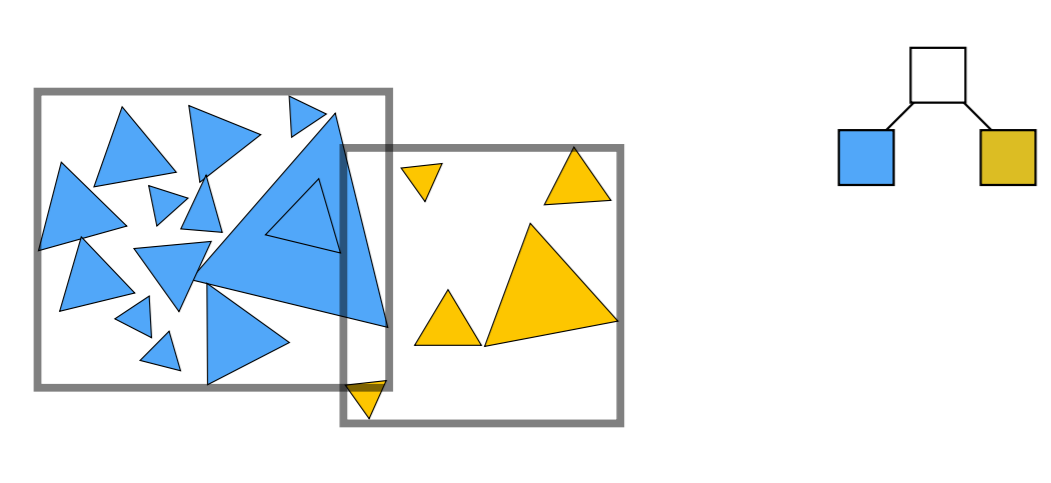
- 一个物体只可能属于一个叶子结点
- 不需要求三角形和包围盒的交点
- 避免了 KD-Tree 的问题
- 但是 BVH 并没有把整个空间划分开,两个子结点可能有重合部分
- 一个好的划分,重叠部分尽量小
- BVH 的研究
- 怎么选取划分方向
- 可以学习 KD-Tree,横竖交替划分,尽量均匀
- 但是可能有一个轴还是很长
- 所以可以每次选择较长的轴进行划分
- 可以选取中间的物体进行划分
- 保证三角形数量差不多
- 树的深度小,更平衡
- 涉及排序问题,重心排序
- 找第 \(k\) 大的数有 \(O(n)\) 的算法
- 快排思想算法
- 适合静态场景
- 动态需要修改
- BVH 的存储和 KD-Tree 类似
- 伪代码
1 | Intersect(Ray ray, BVH node) { |