GAMES101.闫令琪.01.Lecture(01-06)
- https://www.bilibili.com/video/av90798049
Lecture 01
- Overview of Computer Graphics
- 计算机图形学概述
Lecture 02
- Review of Linear Algebra
- 向量与线性代数
Lecture 03
- Transformation
- 变换(二维与三维)
基本变换
- scale、rotate、shear、reflection
- 放缩、旋转、错切、对称
- translate
- 平移
- 变换顺序很重要
齐次坐标
- 统一表示所有变换
Lecture 04
- Transform Cont.
- 变换(模型、视图、投影)
欧拉角
- 表示任意旋转
\[ R_{xyz}(\alpha,\beta,\gamma)=R_x(\alpha)R_y(\beta)R_(\gamma) \]
- roll, pitch, yaw
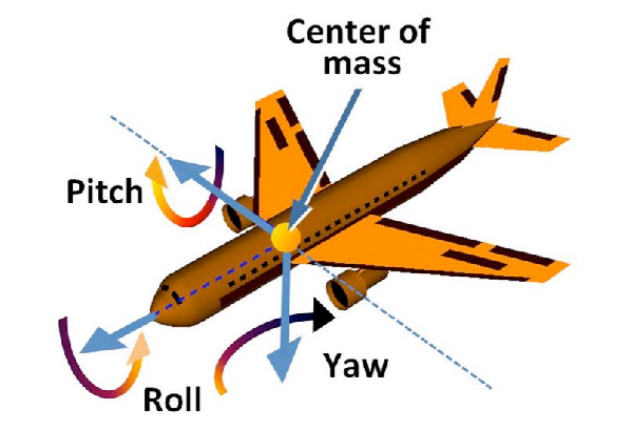
- 存在万向锁问题
绕任意轴的旋转
- Rodrigues’ Rotation Formula
- 推导
- 绕过原点的单位轴 \(\mathbf{n}\) 逆时针旋转 \(\alpha\) 角度
\[ \mathbf{R}(\mathbf{n}, \alpha)=\cos (\alpha) \mathbf{I}+(1-\cos (\alpha)) \mathbf{n} \mathbf{n}^{T}+\sin (\alpha)\left(\begin{array}{ccc} 0 & -n_{z} & n_{y} \\ n_{z} & 0 & -n_{x} \\ -n_{y} & n_{x} & 0 \end{array}\right) \]
MVP 变换
- model、view、projection
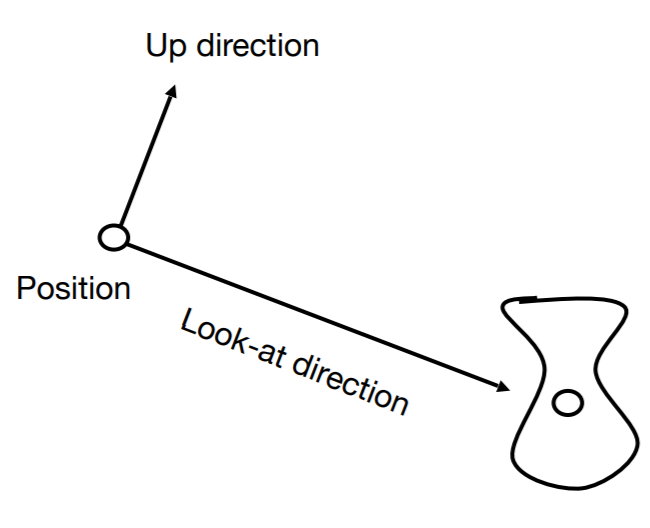
camera 相机
- Position
- \(\vec{e}\)
- Look-at / gaze direction
- \(\vec{g}\)
- Up direction
- \(\vec{t}\)
- 通常变换的结果
- Position
- 原点
- Look-at / gaze direction
- \(-z\)
- Up direction
- \(y\)
- Position
- 变换的过程
- 位置移动到原点
- \(-\mathbf{Position_{camera}}\)
- 旋转(正交变换)
- 位置移动到原点
投影变换
- Perspective projection 透视投影
- Orthographic projection 正交投影
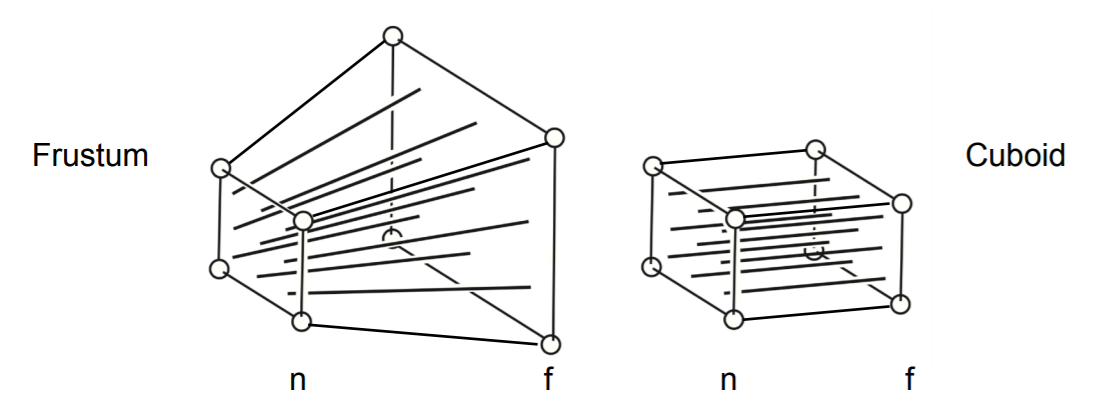
- 透视变换:变换到 \([-1,+1]^3\)
- Frustum 转变为 Cuboid(近裁剪面一样大)
- 平移、放缩
\[ M_{persp} = M_{ortho}M_{persp\to ortho} = M_{scale}M_{translate}M_{persp\to ortho} \]
\[ M_{persp\to ortho}= \begin{bmatrix} n & 0 & 0 & 0\\ 0 & n & 0 & 0\\ 0 & 0 & n+f & -nf\\ 0 & 0 & 1 & 0\\ \end{bmatrix} \]
\[ M_{scale}= \begin{bmatrix} \dfrac{2}{r-l} & 0 & 0 & 0\\ 0 & \dfrac{2}{t-b} & 0 & 0\\ 0 & 0 & \dfrac{2}{n-f} & 0\\ 0 & 0 & 0 & 1\\ \end{bmatrix} \]
\[ M_{translate} \begin{bmatrix} 1 & 0 & 0 & -\dfrac{r+l}{2}\\ 0 & 1 & 0 & -\dfrac{t+b}{2}\\ 0 & 0 & 1 & -\dfrac{n+f}{2}\\ 0 & 0 & 0 & 1\\ \end{bmatrix} \]
\[ M_{ortho}= \begin{bmatrix} \dfrac{2}{r-l} & 0 & 0 & -\dfrac{r+l}{r-l}\\ 0 & \dfrac{2}{t-b} & 0 & -\dfrac{t+b}{t-b}\\ 0 & 0 & \dfrac{2}{n-f} & -\dfrac{n+f}{n-f}\\ 0 & 0 & 0 & 1\\ \end{bmatrix} \]
- OpenGL 中 z 方向乘了个 \(-1\)
计算出参数
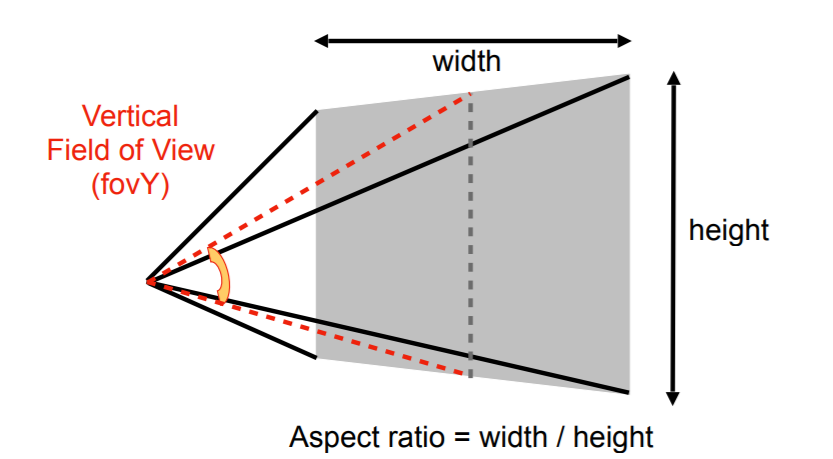
- Vertical
Field-of-View (fovY)
- 一个角度值
- Aspect ratio
- width / height
- 通过 \(n,f,fovY,aspect\) 计算出
\(l,r,b,t\)
- \(t=|n|\times\tan\dfrac{fovY}{2}\)
- \(r=t\times aspect\)
Lecture 05
- Rasterization 1 (Triangles)
- 光栅化(三角形的离散化)
光栅化
- 直接采样
- 实际上采样点的坐标应该是 \((x+0.5,y+0.5)\)
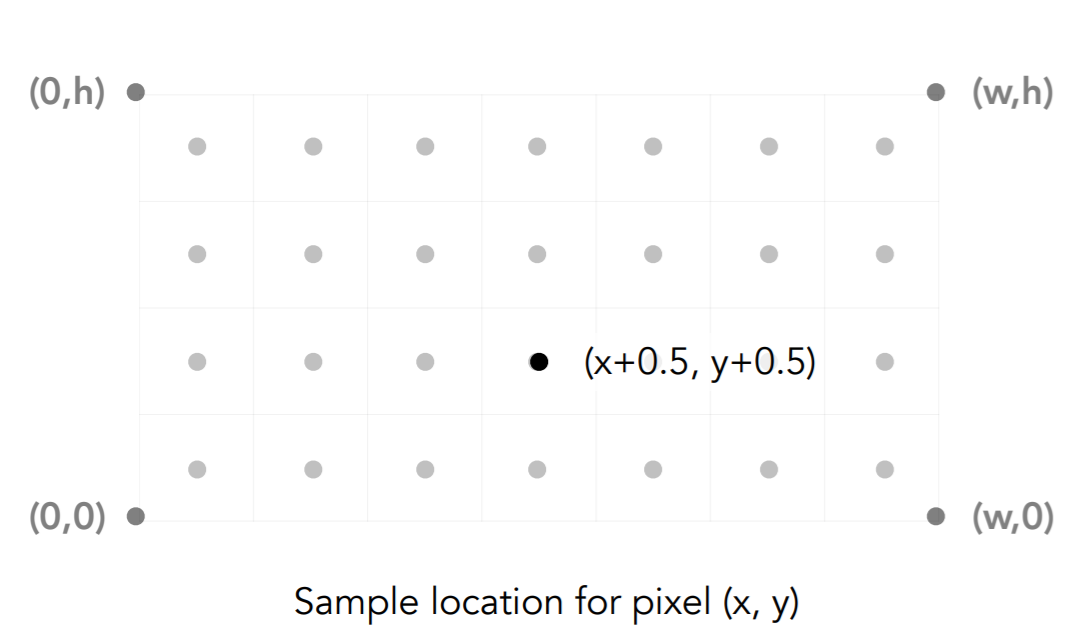
- 中心在三角形内,就设置为三角形的颜色
- 边缘出现走样的问题
- 实际上采样点的坐标应该是 \((x+0.5,y+0.5)\)
- 怎么判断在三角形内部:叉乘
- 点 P 在三角形 ABC 内部,以下三个结果同号
\[ \vec{AP}\times\vec{AB},\vec{BP}\times\vec{BC},\vec{CP}\times\vec{CA} \]
- 点同时在 3 个向量 \(\vec{AB},\vec{BC},\vec{CA}\) 的左边 / 右边
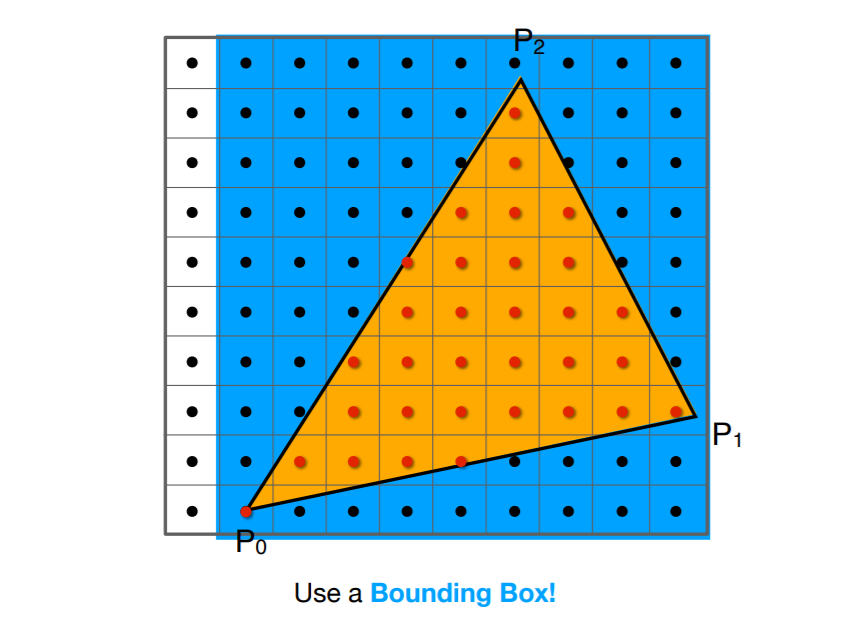
光栅化加速优化
- 基于三角形覆盖的区域较小
包围盒技术
- 不需要对所有的点进行判断,只需要对包围盒内的点进行判断
- AABB 包围盒
- Axis-Aligned Bounding Box
- 横平竖直
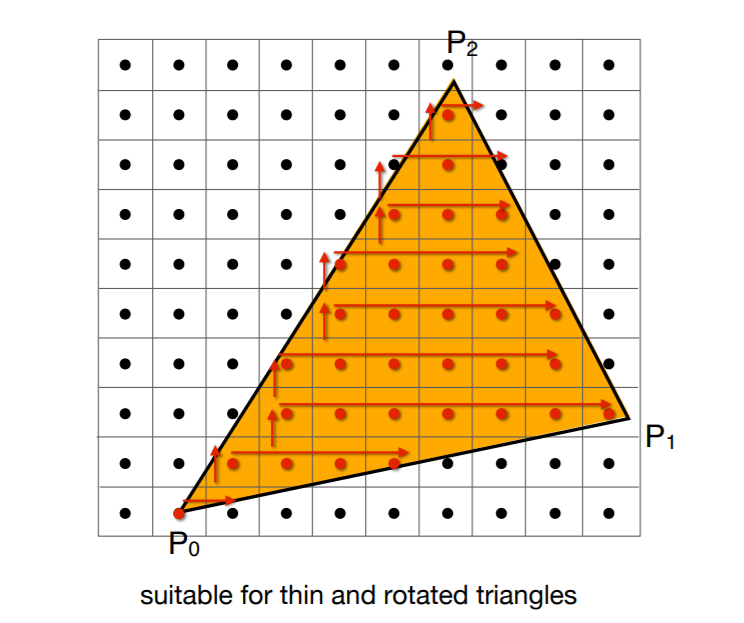
- AABB 包围盒技术失效
- 包围盒大,但是三角形小
- 三角形斜着放
- 如下方法可以解决 AABB 失效的问题
- 适合瘦小、斜置的三角形
光栅化显示技术
- 隔行扫描
- 每帧只渲染一半
- 快、看不出来
- 像素
- 我们认为是不可分的
- 实际上在显示设备上可能是由更小的像素(条/点)组成的
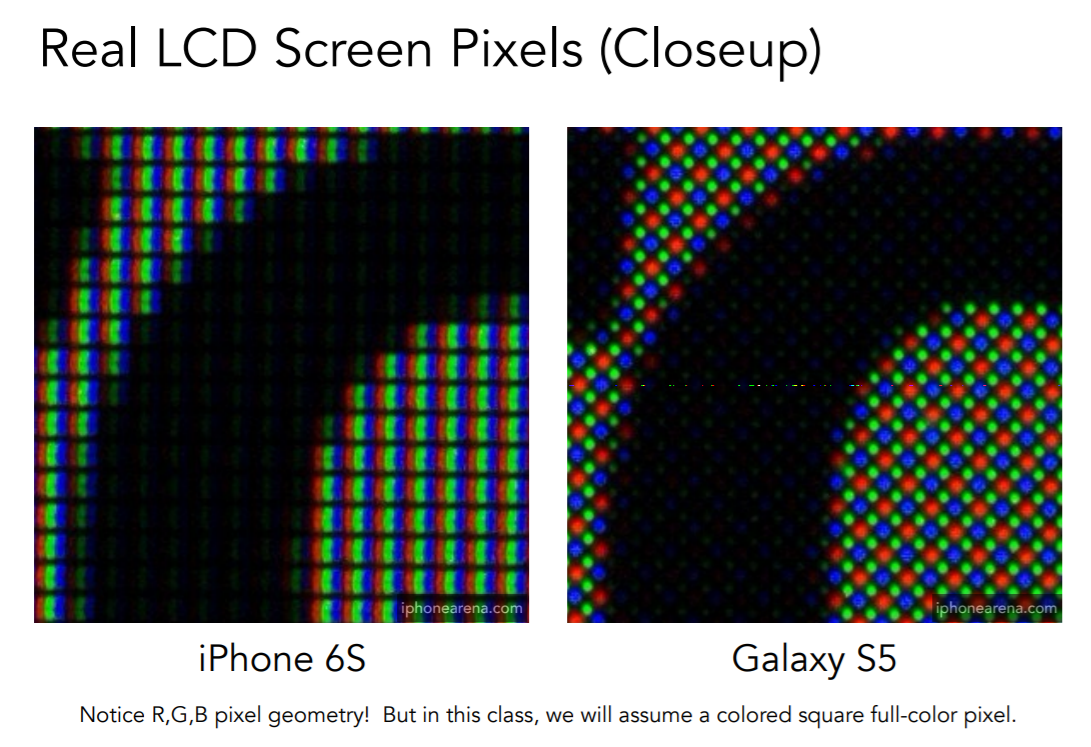
- bayer pattern(iPhone 6S)
- 像素内分布方式
- 像素内绿色多,密度大,红蓝差不多
- 人眼对绿色敏感
- 屏幕:加色系统(初始黑,全加白)
- 打印机:减色系统(初始白,全加黑)
Lecture 06
- Rasterization 2 (Antialiasing and Z-Buffering)
- 光栅化(深度测试与抗锯齿)
采样问题
- Sampling Artifacts in Computer Graphics
- 看上去不太对的东西,瑕疵
- Errors / Mistakes / Inaccuracies
- 锯齿 Jaggies
- 摩尔纹 Moire
- 奇数行、奇数列去掉,变成小的图,但是显示仍然是和原来一样大
- 手机拍显示器的屏幕产生的摩尔纹
- Wagon Wheel Illusion (False Motion)
- 高速行驶的汽车倒转
- 人眼在时间中的采样跟不上运动速度
信号与系统的观点
- 原始图像的频率过高,采样频率跟不上,导致原始的图像不能恢复
- 采样定理
- 当采样频率大于信号中最高频率的2倍时,采样之后的数字信号完整地保留了原始信号中的信息
- 采样过慢,频域上有混叠
- 反走样的方法
- 提高采样频率
- 降低原始图像的频率
- 采样之前先做模糊化
- 反走样方法:采样之前先做模糊化
- 先模糊,后采样 OK
- 先采样,后模糊 NO
- 模糊
- 频域相乘 \(\Leftrightarrow\) 时域卷积
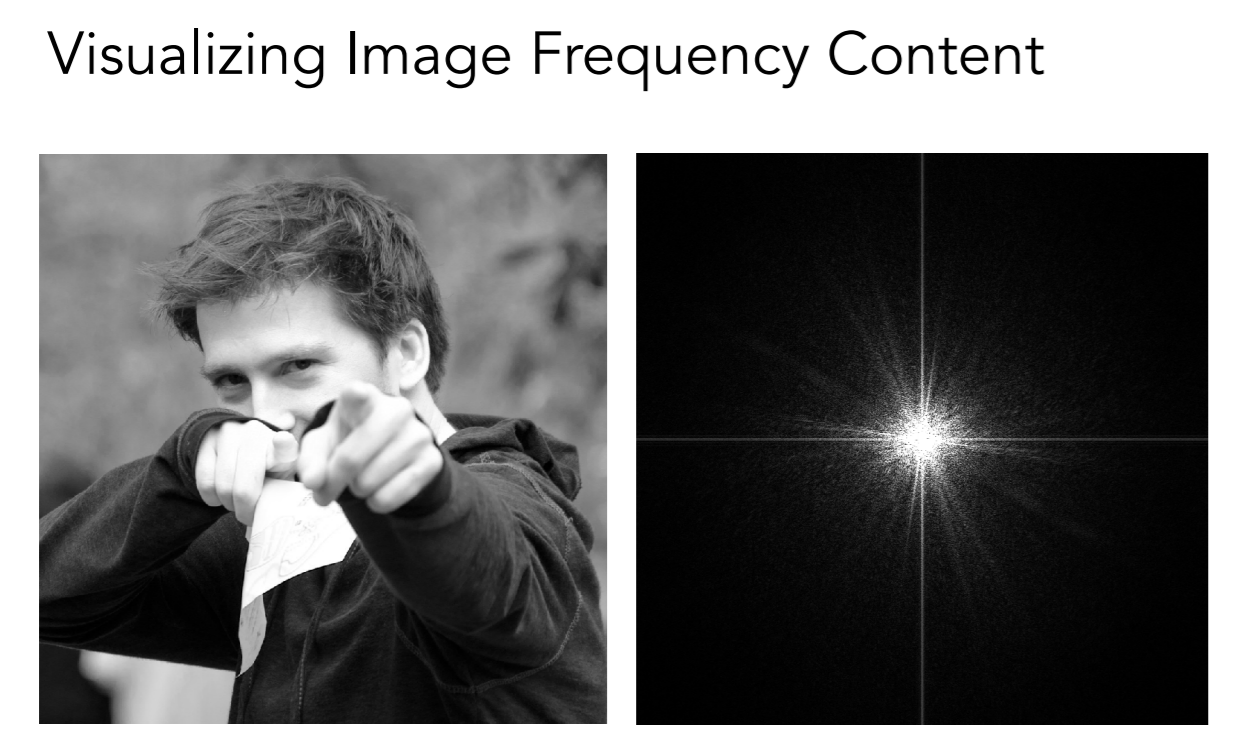
- 傅里叶变换到频域上可视化
- 中间水平竖直线,信号强
- 原因是我们分析图片的时候,会将其看成是重复的(一张一张放一起),边界部分极其高频
Anti Aliasing
- MSAA 增大了计算量
- 使用更多的点去判断是否在三角形内
- 最后通过在三角形内部的采样点的比例计算出近似的覆盖率
- MSAA
解决的是对信号的模糊操作,得到近似的覆盖率(不是增加分辨率)
- 有点的复用
- 例如打开 2x2 的 MSAA 之后,帧率不会变为原来的 \(\dfrac{1}{4}\)
- 工业界近似采样率的得到,不同的
pattern,点的复用,提高效率
- MSAA 是 2x2 的正方形 pattern
- FXAA
- Fast Approximate AA
- 先得到有锯齿的图片,然后做后期处理去除锯齿(图像匹配等方法)
- 和采样无关,是在图形层面上的抗锯齿
- TAA
- Temporal AA
- 时间,复用上一帧的感知,把 MSAA 的采样点分布到不同帧
- Super resolution / super sampling 超分辨率
- From low resolution to high resolution
- Essentially still "not enough samples" problem
- DLSS (Deep Learning Super Sampling)
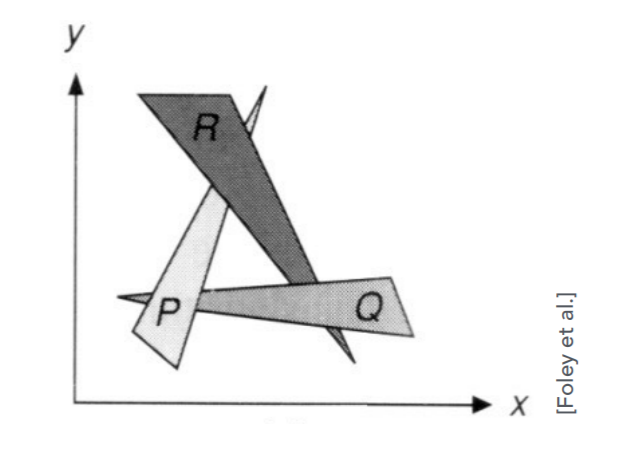
可见性
- 画家算法:先排序,再绘制
- 问题:互相遮挡
Z-Buffer
- Depth Buffer
- 深度缓存
- 复杂度:\(O(n)\)
- 指绘制 n 个三角形,每个三角形只覆盖常数个像素
- 如果配合 MSAA,则应该是每个采样点对应一个深度,而不是每个像素
阴影
Shadow Mapping 算法
- 光栅化比较难处理全局现象
- 图像空间的做法
- 有走样现象
- 思想:如果点不在阴影里,光源可以看到这个点
- 经典的 shadow mapping 算法只能处理 点光源/平行光
的阴影
- 硬阴影
- 非 0 即 1 的问题
- 算法
- 变换到以光源为视点的观察坐标系中,记录深度图
- 正常渲染到以视点为观察坐标系中,将你看到的点转换到上一步的坐标系中,利用深度值怕段是否在阴影中(能否被光源看到)
- 一些问题
- 浮点数判断相等困难,因此会出现黑白条纹的问题
- shadow map 分辨率问题
- 一般游戏中选择阴影质量,就是修改分辨率
- 记录值的精度问题
- shadow map 分辨率问题
- 加入一个 bias
- 需要渲染场景两遍
- 浮点数判断相等困难,因此会出现黑白条纹的问题
- 软阴影与硬阴影
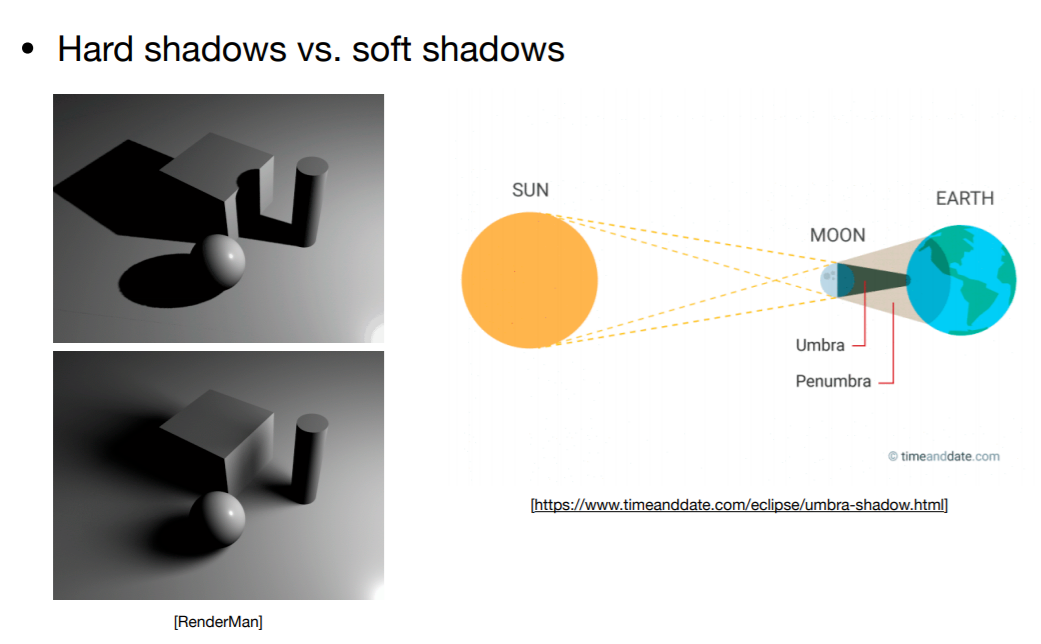
- 物理上的本影与半影