高动态范围成像
HDR 高动态范围成像
- 代码路径
- https://github.com/banbao990/CV/tree/main/HDR
一. 概述
HDR 高动态范围成像的主要内容有 3 个部分,具体的内容以及参考文献如下
- 论文 1:利用多张不同曝光时间的图片重建 HDR 图片
- Recovering High Dynamic Range Radiance Maps from Photographs
- 论文 2:利用单张 LDR 图片和 intensity map 图片重建 HDR 图片
- Neuromorphic Camera Guided High Dynamic Range Imaging
- 论文 3:对单张 LDR 图片,利用 deep-CNNs 重建 HDR 图片
- HDR image reconstruction from a single exposure using deep CNNs
接下来的内容就围绕着这 3 篇论文展开
二. 正文
论文 1:利用多张不同曝光时间的图片重建 HDR 图片
Recovering High Dynamic Range Radiance Maps from Photographs
论文 2:利用单张 LDR 图片和 intensity map 图片重建 HDR 图片
Neuromorphic Camera Guided High Dynamic Range Imaging
2.1 主要目的
- 利用单张 LDR 图片和 intensity map 图片重建 HDR 图片
- 由于一张 RGB 的LDR 的图片在高曝光和低曝光区域都存在一些细节缺失,而 intensity map 中保留了所有区域的深度信息,因此可以在某种意义上使用这两张图片恢复出一张 HDR 的图片,该论文的第一部分就介绍了这样的一种方法
2.2 主要方法
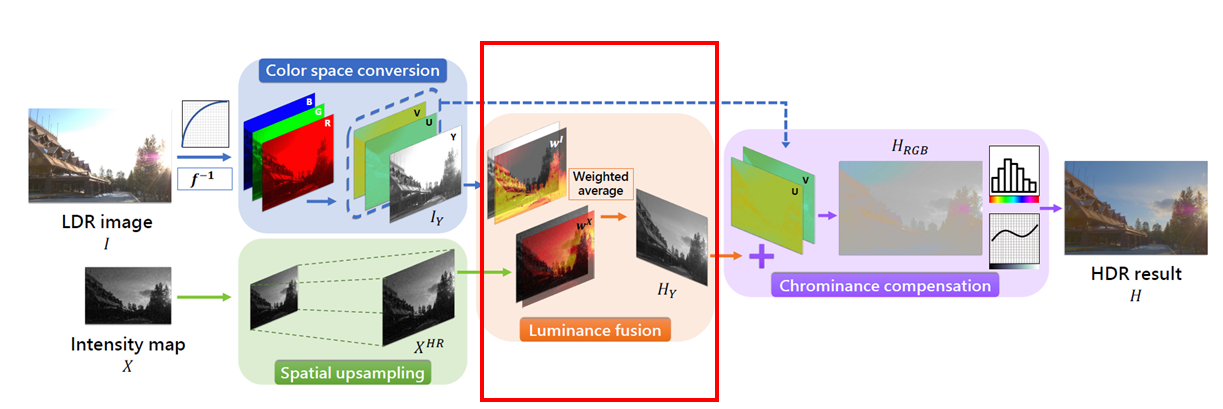
- 以上是流程图,具体的步骤如下
- 首先我们利用相机响应函数将 LDR 的图片从非线性转化到线性空间得到图片pic1
- 将 pic1 从 RGB 空间转换到 YUV 空间中得到 pic2,此时 Y 平面中包含了图象的深度信息
- 将 intensity map 过采样到和 LDR 图片大小相同得到 pic3
- 将 pic3 和 pic2 的 Y 平面进行融合得到 pic4
- 将 pic4 作为 pic2 的 Y 平面,将其转化为 RGB 空间
- 最后通过 tone mapping 将图片转化为观感较好的 RGB 图片
2.3 具体的实现与效果展示
- 使用 opencv 的 python 版本实现
- 具体使用到的库以及 python 的版本信息如下
1 | python: 3.7.9 [MSC v.1916 64 bit (AMD64)] |
每一步的实现如下,具体细节见代码
以下以示例图片作为简单的效果展示
示例图片
- ldr 图片

- intensity map

- ground truth

(1) 逆色调映射
- 因为我们不知道相机的响应函数以及图片的曝光时间,因此使用简单的
gamma2.2 校正
- \(y=x^\frac{1}{\gamma},gamma=2.2\)
- 效果图如下

(2) RGB 空间转换为 YUV 空间
1 | # opencv 自带的函数 |
- 展示 YUV 空间的图片
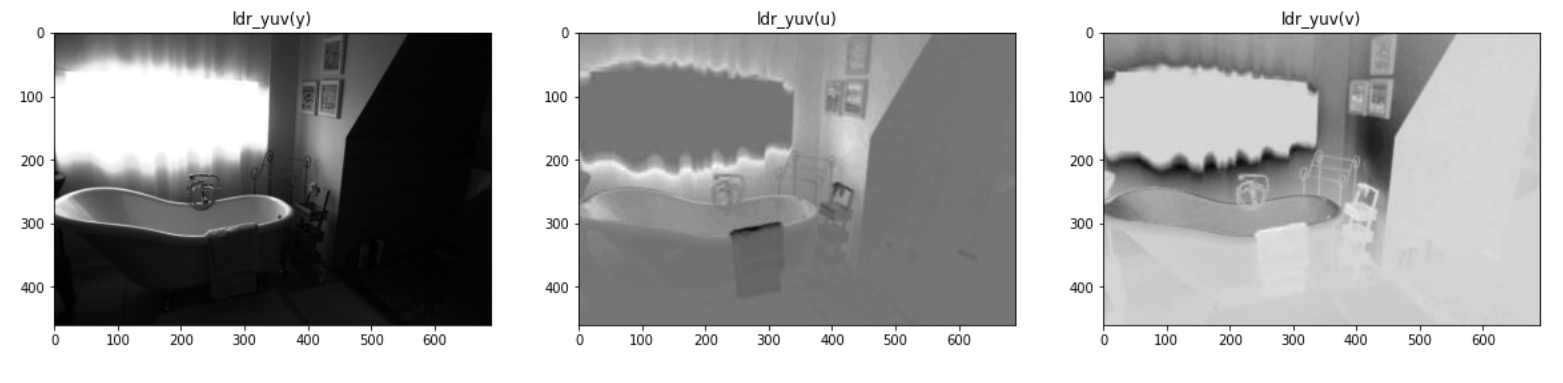
- 我们看到这里的 Y 平面中确实含有一定的深度信息
(3) intensity map 的大小转换
- 使用论文中给的使用 INTER_CUBIC 三次样条插值
(4) 深度融合
尝试了两种融合方法
- 论文中给的是 \(w_{ij}∗Y_{ij}+(1-w_i)∗I_{ij}\)
- 其中
\[ w_{ij}=\frac{(0.5-max(|I_{ij}-0.5|,τ-0.5))}{(1-τ)} \]
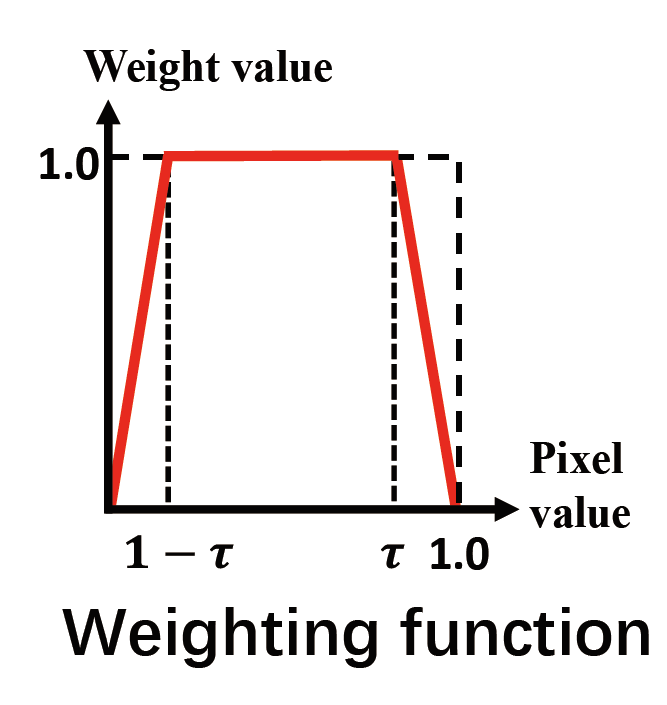
- \(w_{ij}∗Y_{ij}+I_{ij}\)
- 论文中给的是 \(w_{ij}∗Y_{ij}+(1-w_i)∗I_{ij}\)
展示效果图如下
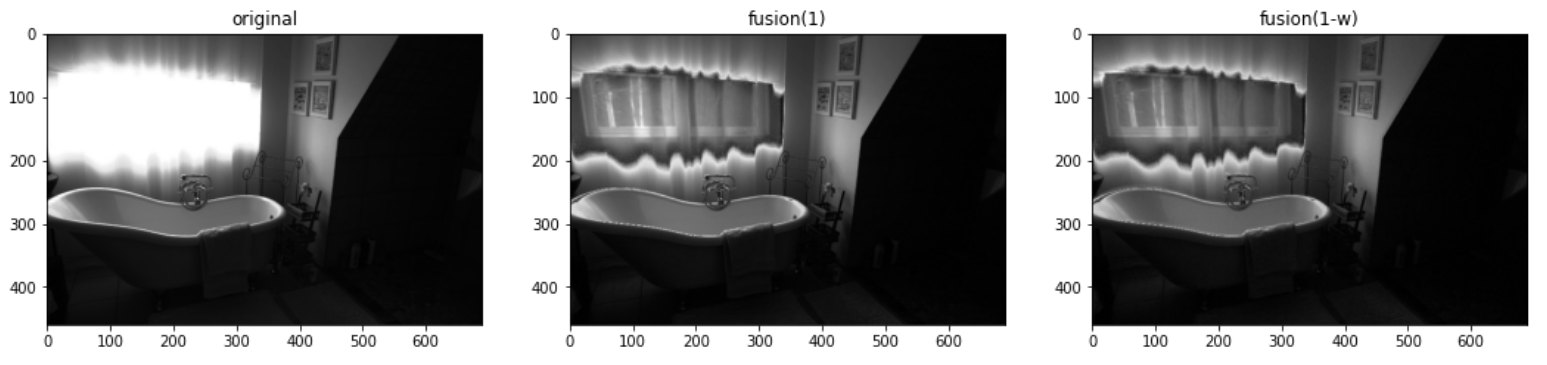
(5) 最后的色调映射
- 简单的使用 gamma2.2 校正
- 使用论文函数 (w)

- 使用函数 (1-w)

图上我们可以看到亮处的深度信息已经被恢复出来,但是颜色信息缺失了
上下对比,我们发现使用函数 w 的图片更加亮一些,但是出现了一些模糊的现象(例如水管部分)
- 更亮是因为使用 w 得到的值更大
- 模糊是因为 ldr 图片和 intensity map 的对齐问题,对齐问题在两张图的深度都占一定比例时体现的最完全,也就是亮度中等的时候
颜色信息缺失是没有办法的,因为我们没有处理原图的 U/V 两个平面的颜色信息,而只是补充上了深度信息
而论文中最后使用神经网络生成的图像从 U/V 两个平面学到了色彩信息,因此填充上了色彩
还有存在的问题是过渡效果比较差,因为 intensity map 中整体偏暗,导致结果图中本应该是亮色的部分反而偏暗,因此过渡比较难看
2.4 一些改进与颜色校正的尝试
- 在上课做完报告之后,我们发现在 intensity map 之中确实整体偏暗,导致合成的结果亮色部分偏暗,以下是我们的一些修改策略
- 以下以示例图片为例,展示如下
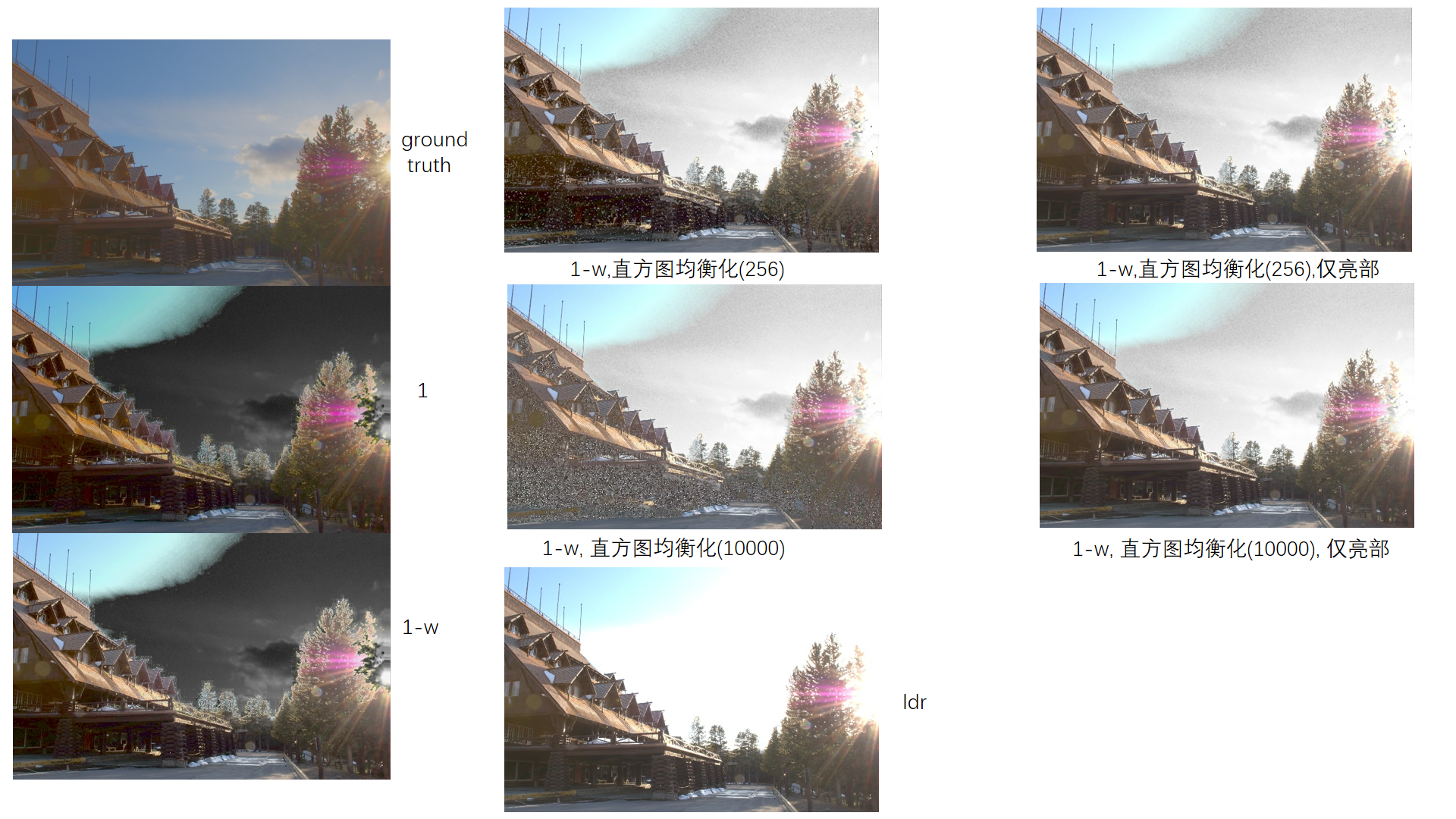
(1) 直方图均衡化 (调库+256采样)
- 原始的直方图
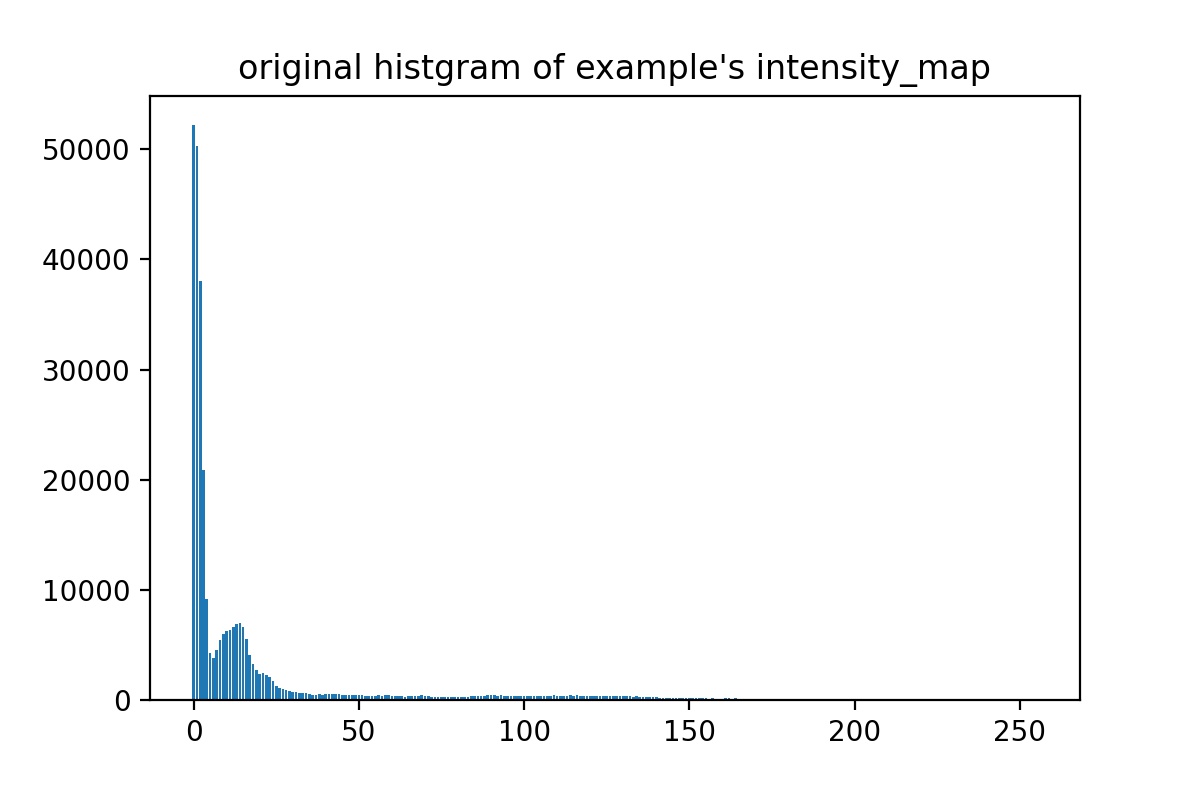
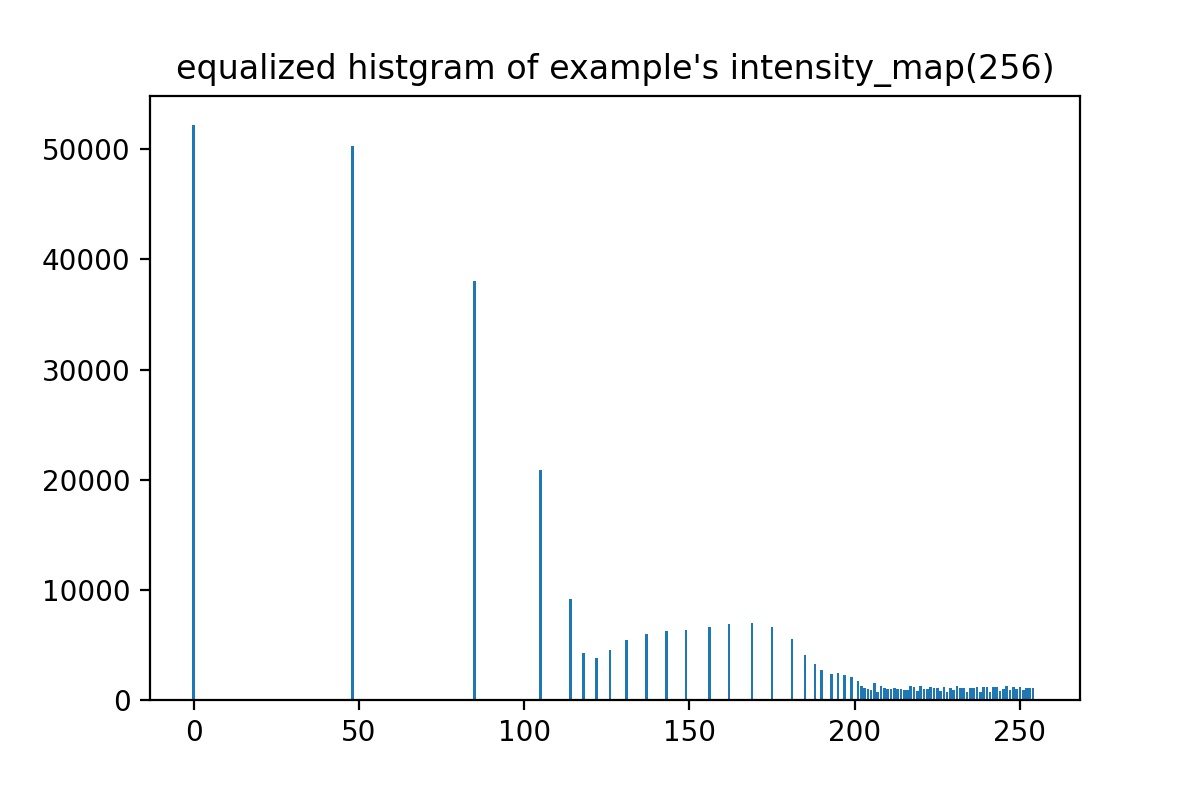
- 直接调用内置的函数实现,但是内置的函数只能实现 256 精度的采样
.jpg)
效果如上图所示,我们发现亮色部分的提升很明显,但是暗色部分的噪声也很明显
这一方面是时直方图均衡化采样精度低导致的问题
- 采样精度低会导致结果并不是很均衡,丧失高动态范围
另一方面是原生的问题 intensity map 本来分辨率就低导致的
均衡化的直方图如下
(2) 直方图均衡化 (高采样)
自己写的一个高精度的直方图均衡化
采样精度为 10000,直方图如下
- 基本上实现了均衡化
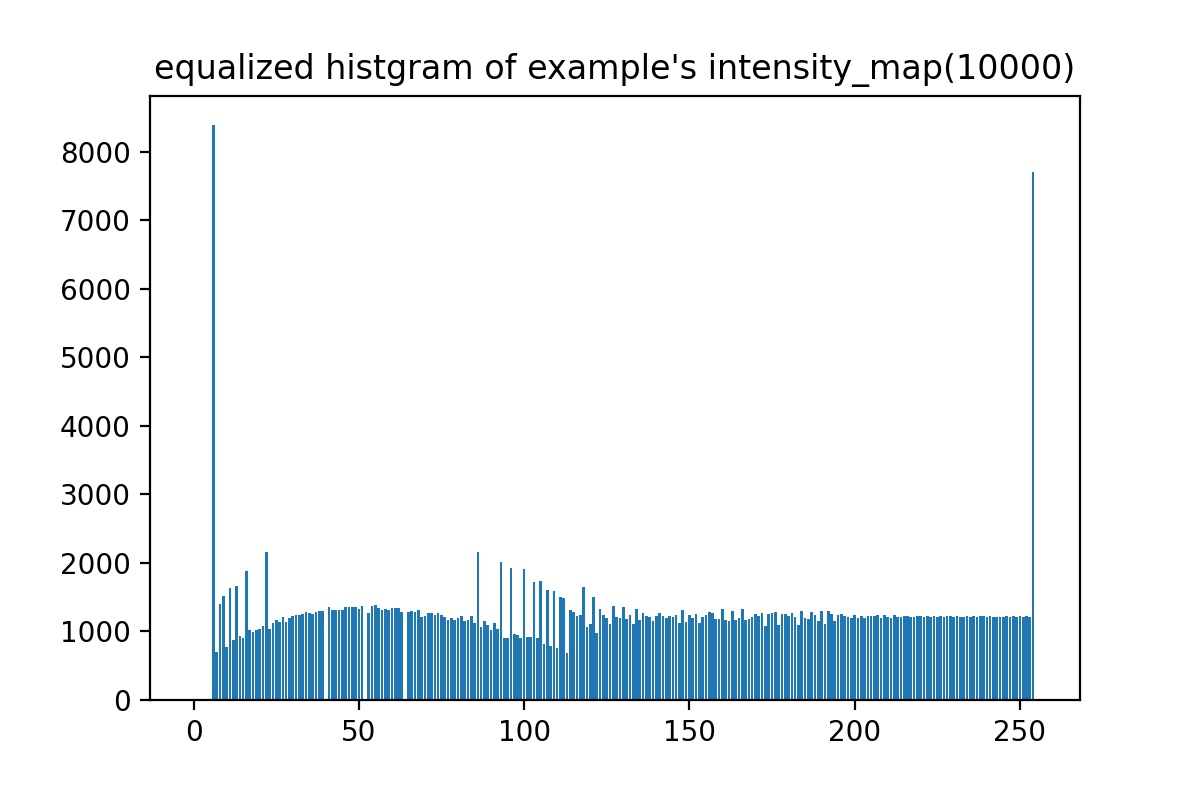
- 但是最终合成效果还是不太好,噪声很严重(似乎更严重了,噪声的采样也更细致了)
.jpg)
(3) 调整权重函数
手动设置范围将暗部噪声减弱
一个简单的操作就是直接将暗处的 intensity map 舍去,将权重函数修改为如下 \[ w_{ij}=\frac{(0.5-max(I_{ij}-0.5,τ-0.5))}{(1-τ)} \]
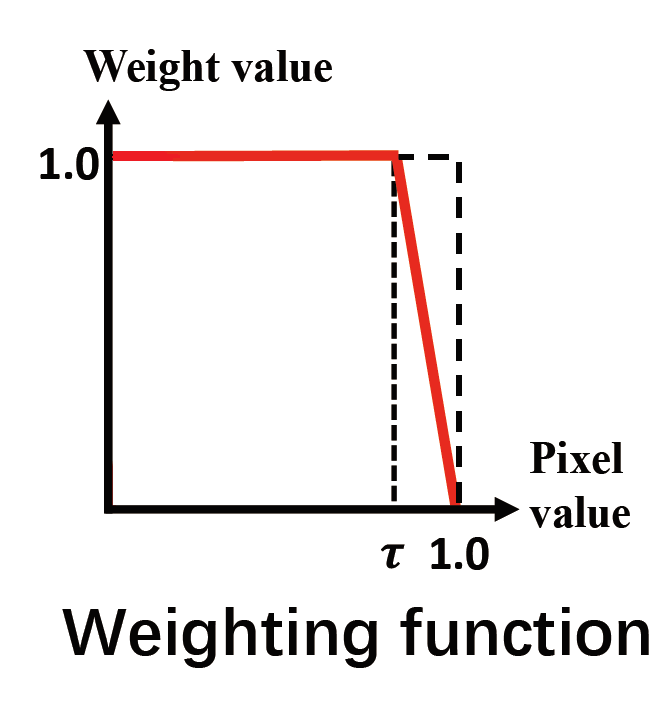
虽然说这样就舍弃了暗部的高动态范围,但是这和噪声相比不算什么
效果如下
.only.bright.jpg)
- 感觉还是很棒的,过度效果也挺好的
2.5 其他图片的效果图
1 | // TODO |
(1) 图片1的结果
- 效果很好,过渡比原来直接做的效果好太多了
- 不使用 intensity map 的暗部也使得噪声控制很好
(2) 图片2的结果
- 效果一般,但是色调比较正常
- 过渡也比较好,但是跟 ldr 图片相比,最终的动态范围提升不大
- 这张图片的主要提升点应该在暗部,但是我们现在的解决方案对暗部提升没有作用
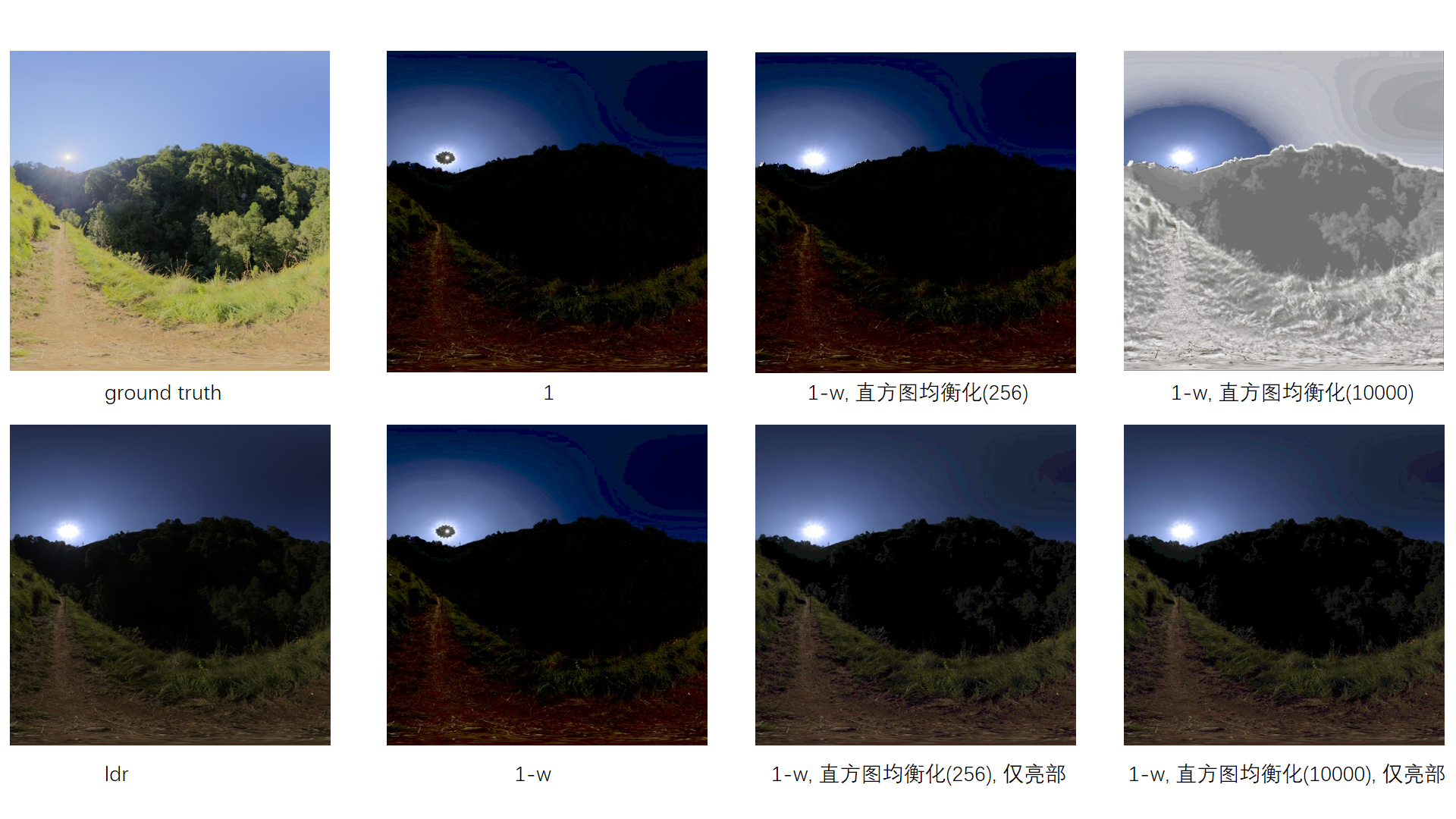
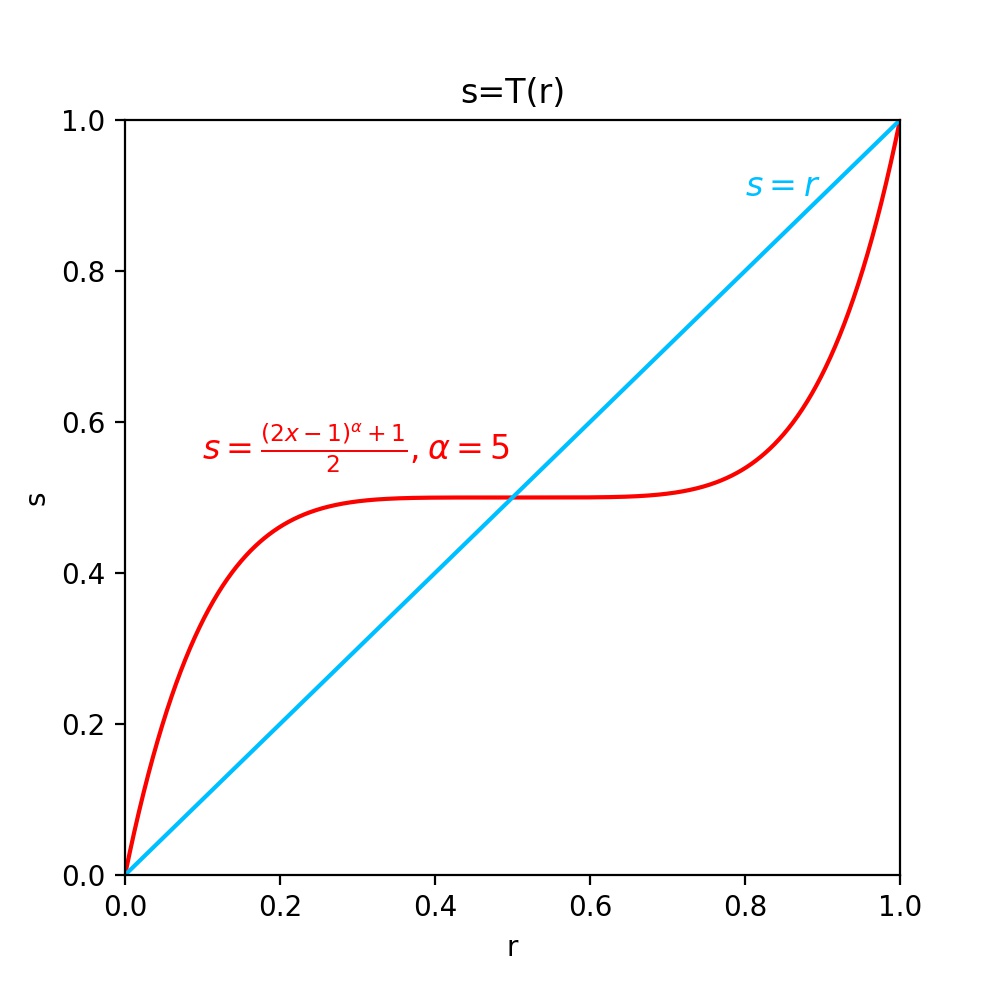
尝试了一个其他的方法
- 对整体进行一个校正,暗处加强,亮处减弱 \[ s=T(r)=\frac{(2x-1)^{\alpha}+1}{2} \]
使用 1-w,仅保留 intensity map 中的亮部
效果如下
- 相较于之前而言,整体配色接近原始图片,而且在亮处的过度也稍微好一些,此时暗处提确实提高了亮度

论文 3:对单张 LDR 图片,利用 deep-CNNs 重建 HDR 图片
HDR image reconstruction from a single exposure using deep CNNs
3.1 环境配置
- 实验环境 Google Colab
1 | tensorflow-gpu==1.12.0 |
- 遇到一些问题
- 本地配置可能需要比较大的显存
- 至少大于 2G
- 对于比较大的图片上的输入,可能也跑不动
- 本地配置可能需要比较大的显存
3.2 方法简述
- 构造一个神经网络如下,训练从一张图片生成 HDR 的能力
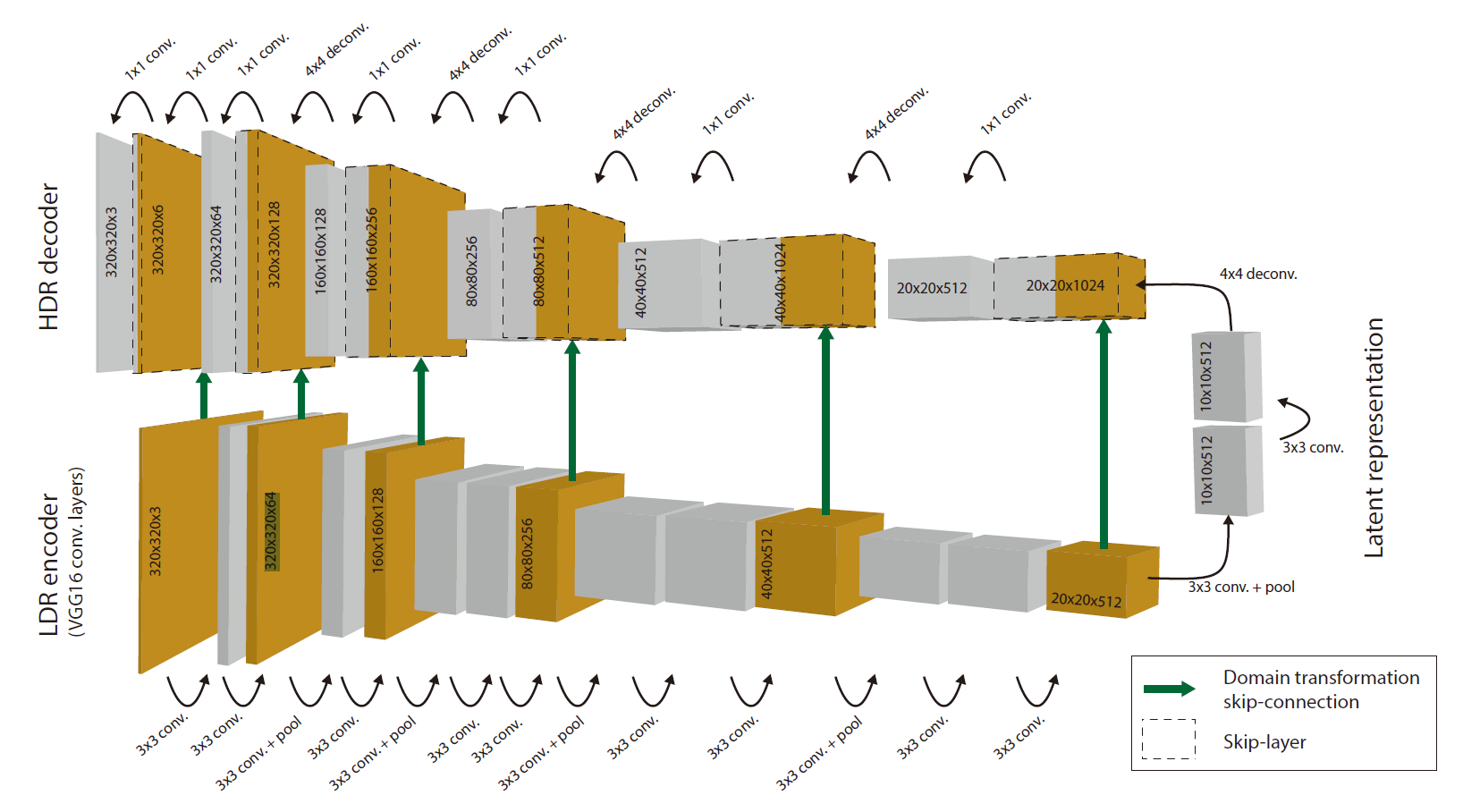
- 设计亮点
- skip-connection
- 保留高维细节
- HDR-decoder 对比
- log 域
- 范围大
- 损失函数
- 直接差异R + 正则项 I
- 颜色,细节 + 全局亮度
- I => 只能处理高曝光的补全
- 只能够补全高曝光面积较小的区域
- skip-connection
- 本质上神经网络是学习到了加强高曝光区域的细节
- 如果输入的图片在高曝光区域没有任何细节,那么是无法恢复的
3.3 效果展示
(1) 示例图片

- 效果很好,甚至文字细节都展示出来了
(2) 论文 1 的图片
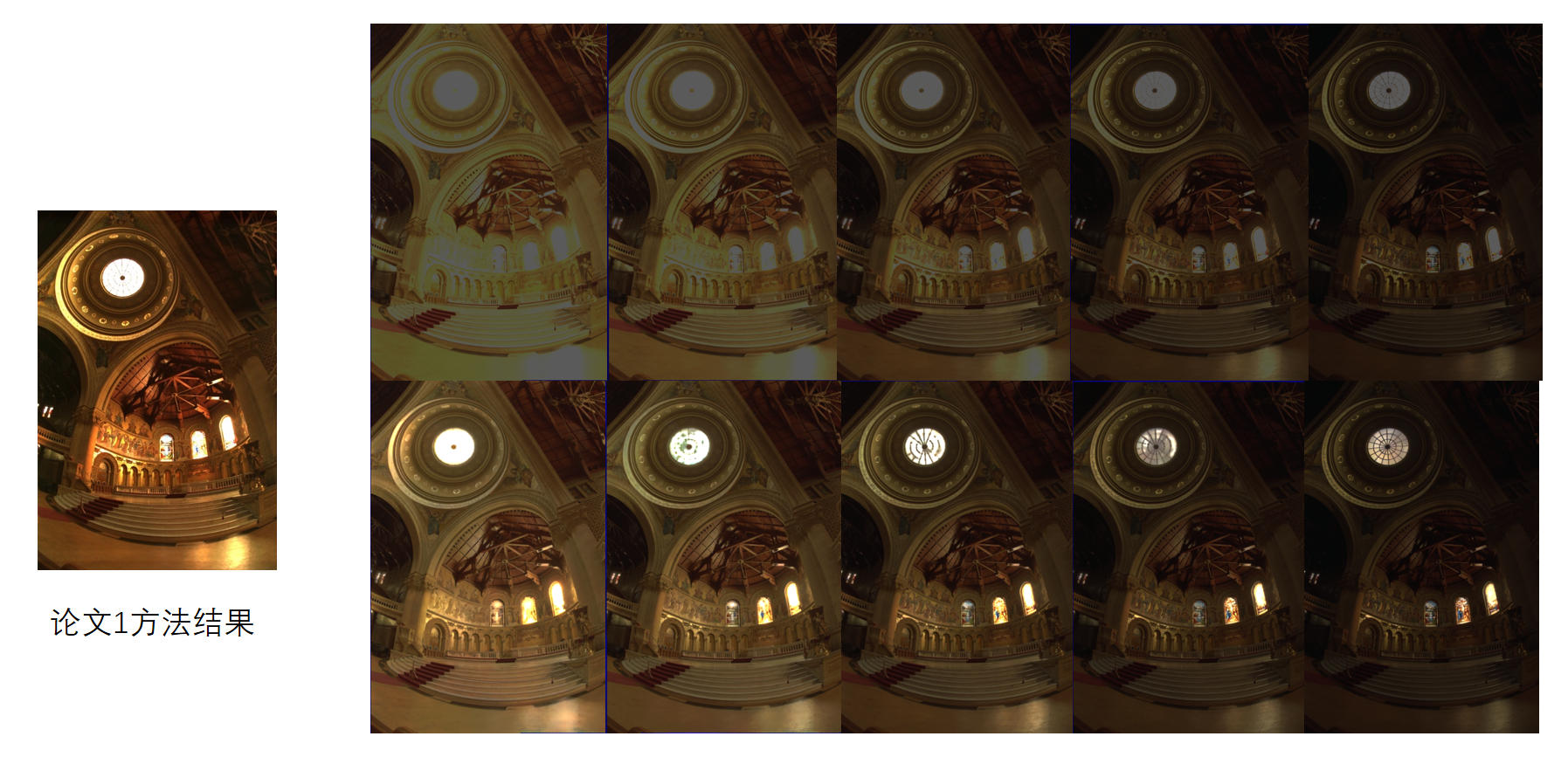
- 效果超级好
- 灯顶、窗户细节
(2) 论文 2 的图片
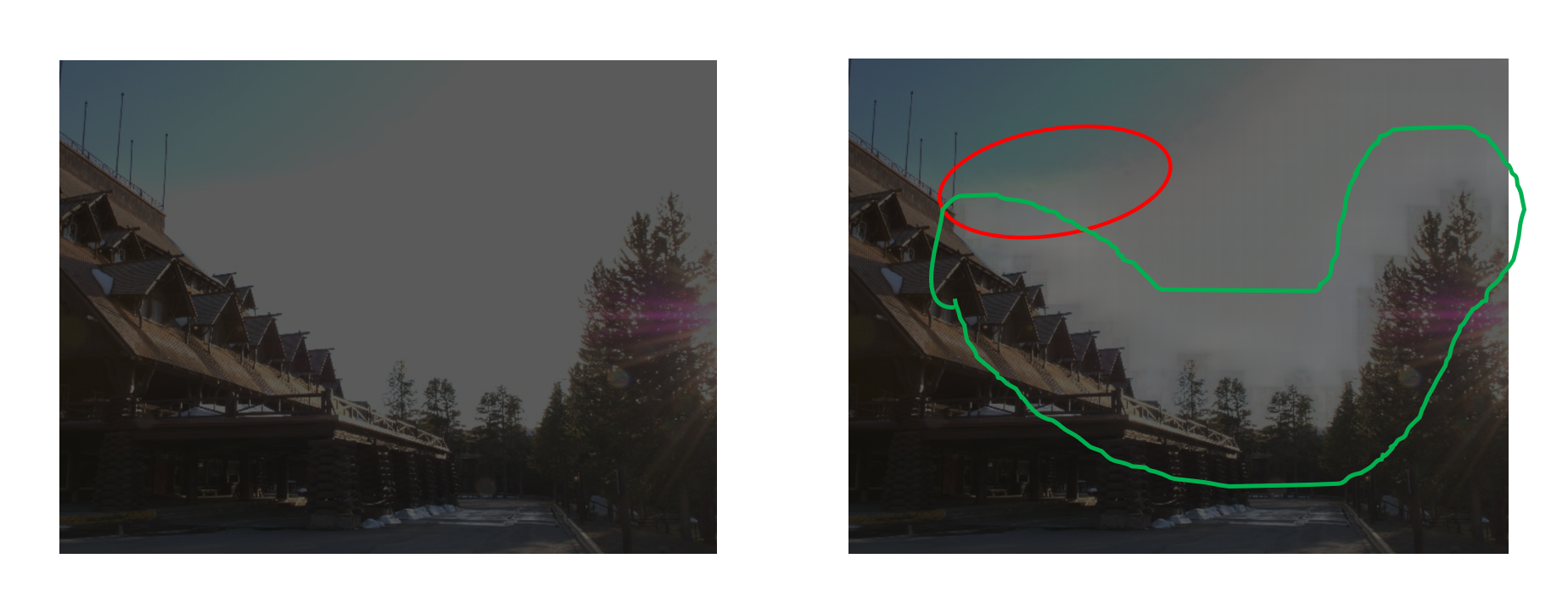
- 首先恢复了一些颜色信息,这是论文 2 的简单方法做不到的,这个很强
- 红色区域
- 出现了一些问题,树枝周围存在一些阴影
- 绿色区域
- 神经网络本质上是加强了高曝光区域的细节,这里细节信息比较少,因此将树枝周围的小的高曝光区域使用树枝的成分进行了补全,导致在结果上产生了阴影

- 对于低曝光区域,神经网络无法给出结果
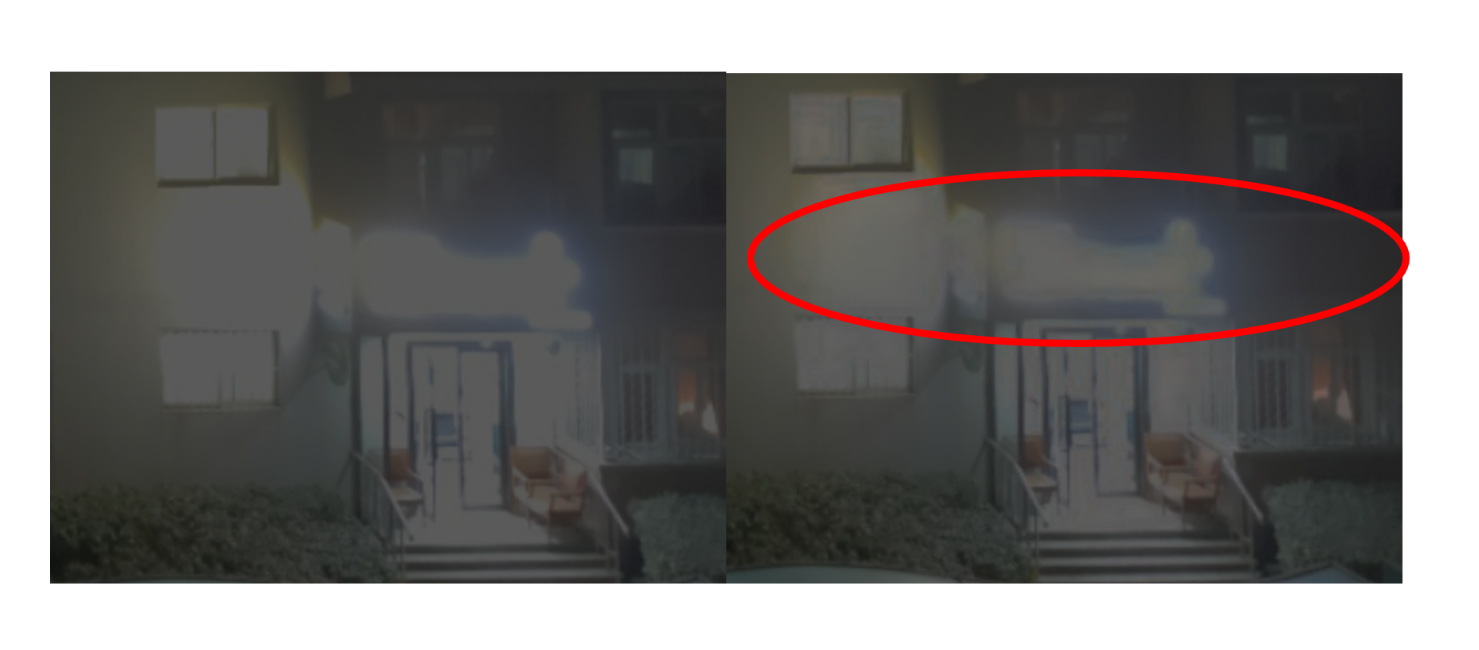
(3) 自己拍的照片
灯光
- 能够很好的将灯光细节恢复过来

安全入口标志
- 也能除去一些发光的亮晕
- 对于上面的灯,也有一定的缩小光电的作用

中文字
- 恢复没有英文字那么明显,可能是中文字符的连接比较复杂,没有英文字符那么容易修复
三. 总结
(1) 方法对比
- 论文 1:利用多张不同曝光时间的图片重建 HDR 图片
- 优点
- 理论基础好,图片较多时恢复效果好
- 能够把高曝光和低曝光区域的高动态范围都做的很好
- 缺点
- 需要大量已知曝光时间的照片
- 需要自己设定最终的色调映射函数
- 设置不好的时候会出现奇怪的色彩
- 多张图片需要处理对齐的问题
- 优点
- 论文 2:利用单张 LDR 图片和 intensity map 图片重建 HDR 图片
- 优点
- 能够将图像的深度信息较好的恢复
- 两张照片即可,相对容易获取
- 缺点
- 需要获得 intensity map
- 恢复不出来颜色信息
- 需要自己设置色调映射函数
- 可能需要进行 ldr 图片和 intensity map 的对齐
- 存在一定的偏差
- 每一张图片的性质不同,如果要恢复得比较好的话,需要对每一张图片进行调节
- intensity map 的低分辨率导致图片的低曝光区域噪声很多,因此对低曝光区域的恢复也不太好
- 优点
- 论文 3:对单张 LDR 图片,利用 deep-CNNs 重建 HDR 图片
- 优点
- 所需材料少,获取材料简单
- 效果其实很好,使用论文1 中一张合适的图片便可以将整体恢复得很好
- 缺点
- 训练一个这样的神经网络需要大量的材料和算力
- 需要有一定的硬件设备
- 显卡内存需要比较大
- 只能恢复高曝光饱和的情况
- 细节缺失严重的时候恢复不出来
- 回复的细节信息可能与实际有所偏差
- 优点